






 本文详细介绍了LinuxCNC与EtherCAT的基础知识,涉及系统环境搭建、IGHetherCAT驱动安装、配置流程,包括LinuxCNC配置文件的修改和CANopen的PDO/SDO。特别感谢博主baby洁的技术分享和指导。
本文详细介绍了LinuxCNC与EtherCAT的基础知识,涉及系统环境搭建、IGHetherCAT驱动安装、配置流程,包括LinuxCNC配置文件的修改和CANopen的PDO/SDO。特别感谢博主baby洁的技术分享和指导。
机器人控制LinuxCNC与EtherCAT介绍&&PDO&SDO,搭建环境步骤
1.前言
内容包含:Linuxcnc介绍&&EtherCAT介绍、CANopen协议中SDO&&PDO、LinuxCNC驱动EthertCAT环境搭建工作,具体的流程。
| 最近几天学习LinuxCNC和EtherCAT的总结报告 |
《LinuxCNC与EtherCAT学习笔记(3)——基于Preempt_RT的IgH EtherCAT Master安装》这篇博客不错,此博主系统安装倒吐的经验,命令都给背下来了,俺是大写的服
《一次性安装主站》,这是笔者之前写的,后面会整理个更新的,一直以来没咋搞,这次老师催得紧
| 首先!(重点标红) |
| 我要感谢! |
| 感谢博主:[baby洁] |
快点击关注一波,安装ethercat可以按照她这个来:baby洁
此仙女帮忙调试了几天,最终让笔者的老牌伺服驱动器转动了…
她是我们的榜样~
啊~榜样
您的力量是无穷的
啊~榜样
您的力量伟大而又崇高
啊~榜样
您具有良好的感染力
啊~榜样
您好比我们人生的坐标,事业成功的导向
啊~榜样
您那伟大的、善良的、无私的、乐于助人、美丽的精神值得学习
啊~榜样
…

| 注意 |
| 这不是在凑字数 |


| 感谢的话不多说了 |
| 感激之情,溢于言表,唯有铭记于心 |

| 正题! |
2.正题
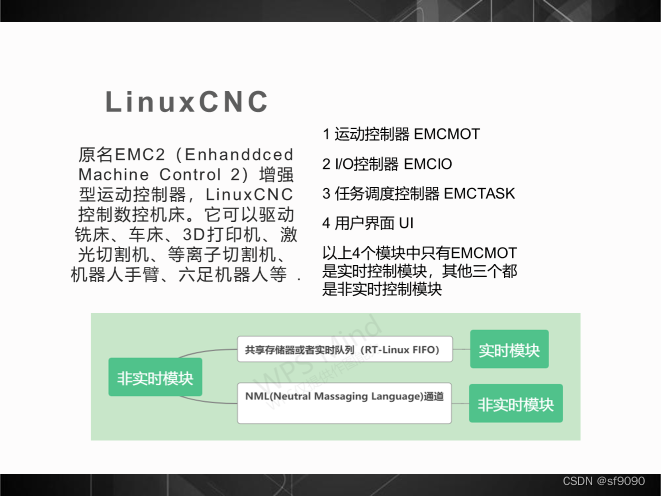
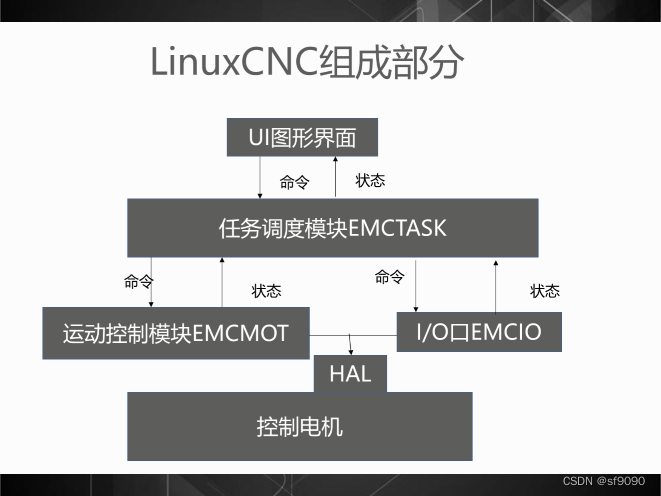
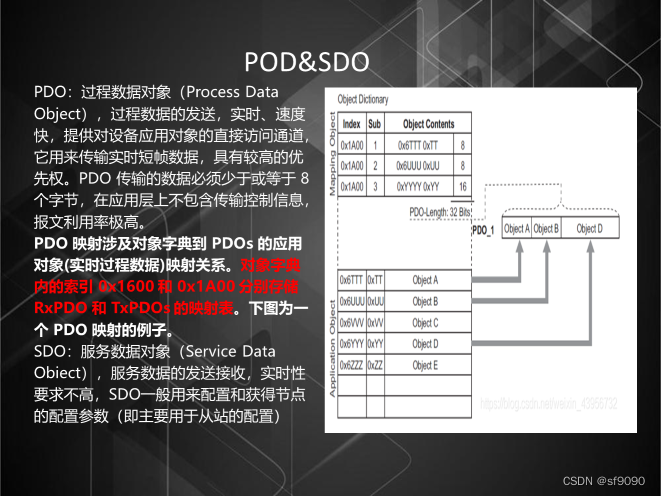
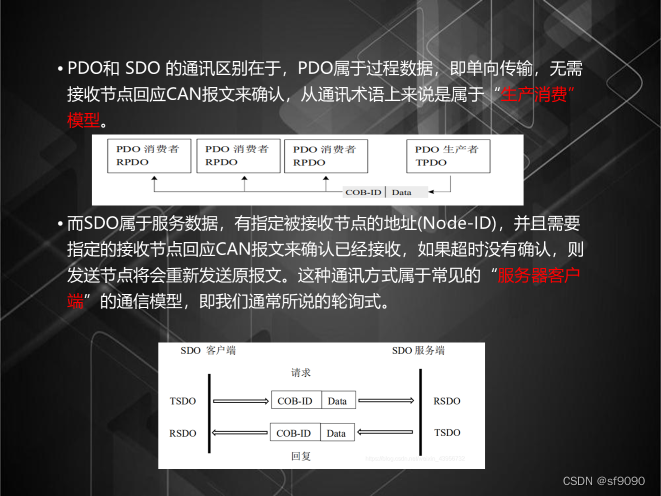
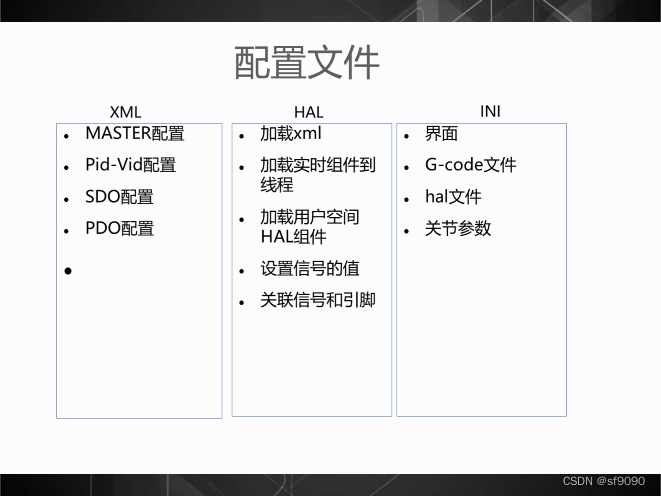
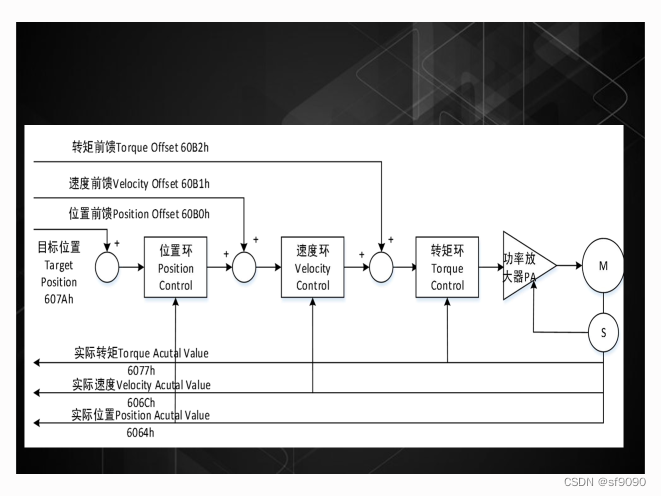
包括LinuxCNC、EtherCAT介绍,包含系统环境搭建、驱动安装、以及需要配置的文件。INI\HAL\XML配置。讲解EtherCAT通信原理,讲解LinuxCNC通信原理以及各部分模块的介绍。包含CAN协议的PDO过程数据对象和SDO服务数据对象的讲解等

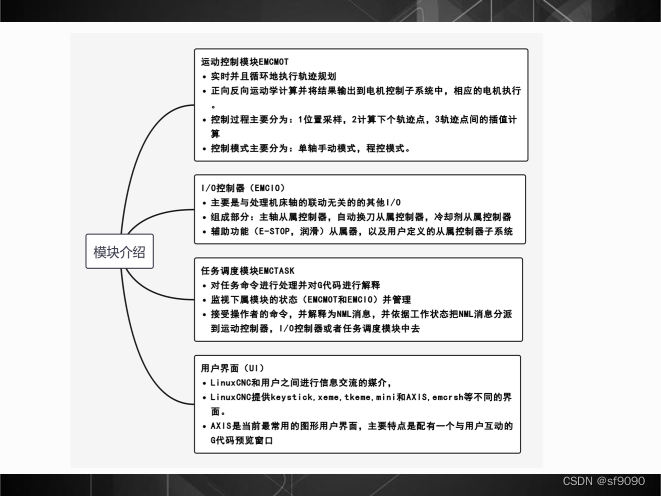
1.LinuxCNC介绍
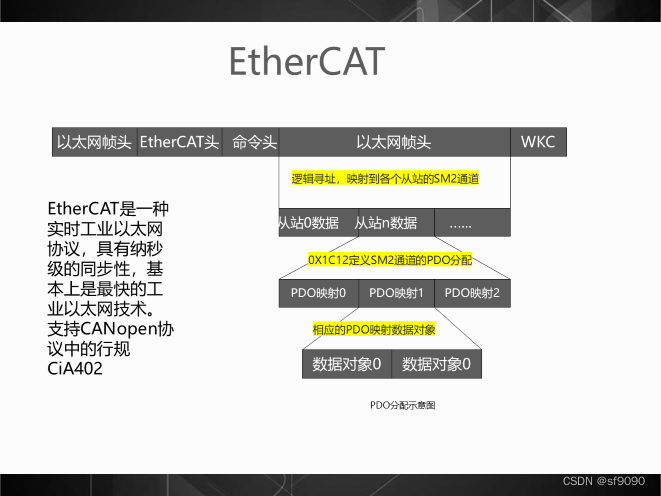
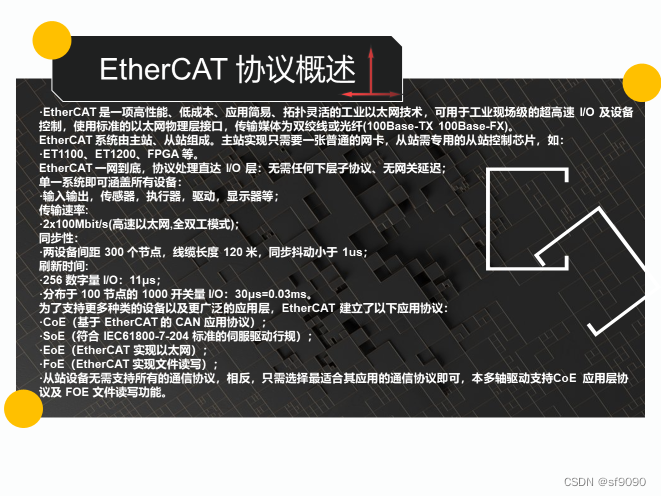
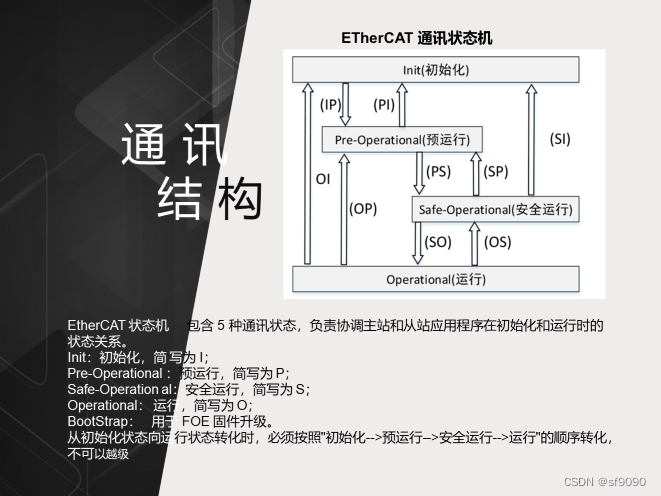
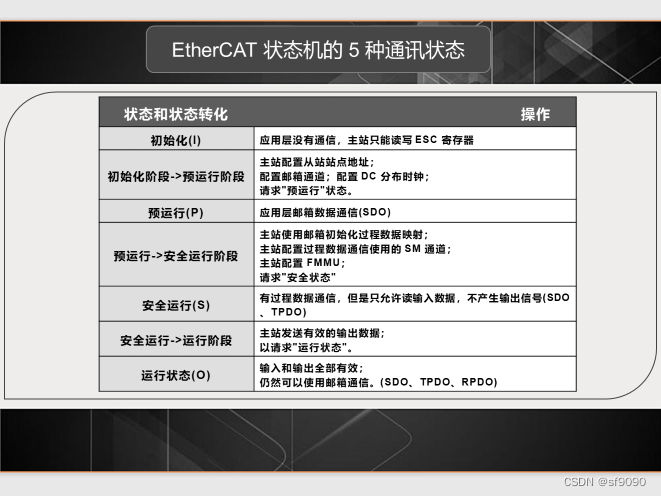
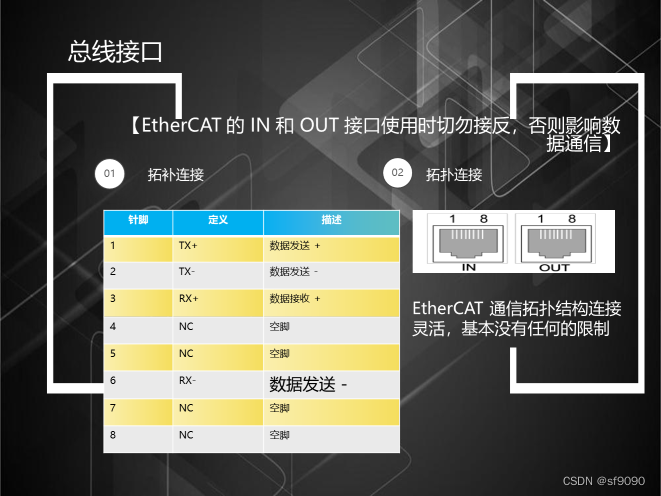
2.EtherCAT 介绍
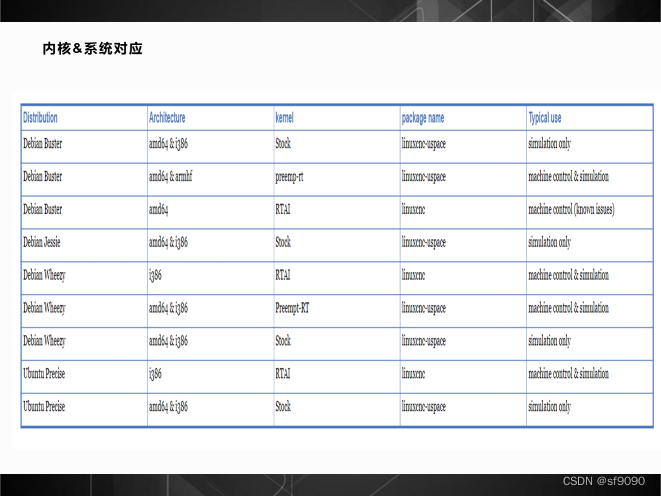
3.系统环境搭建
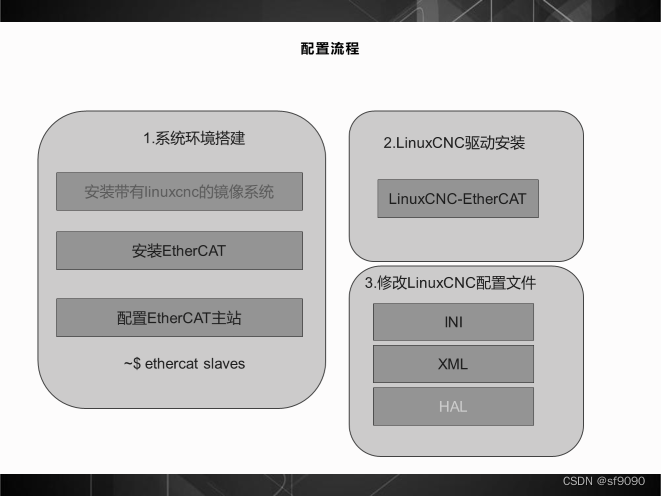
4.配置流程

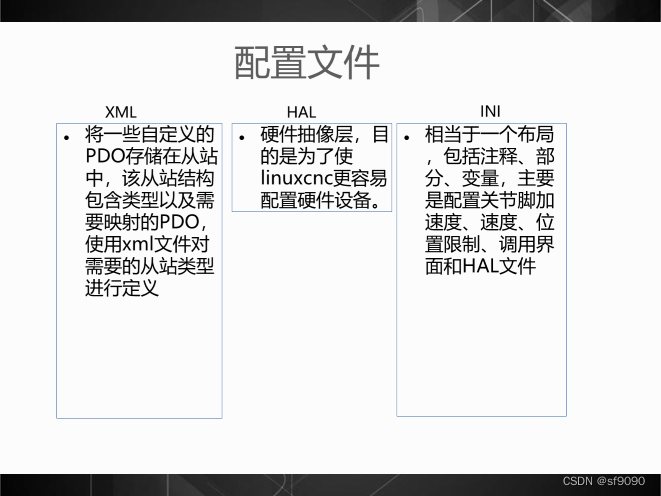


LinuxCNC配置文件的修改以及环境搭建后面会更新一个更详细的系统性的文章

| 【关注微信公众号一起来交流】 |



















 2870
2870


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










