 理解Bounding Box Regression的对数设计
理解Bounding Box Regression的对数设计





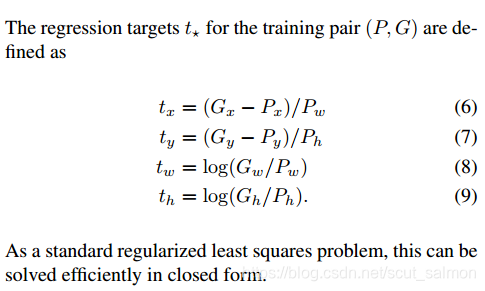
 该博客探讨了在目标检测中,为什么bounding box regression的label通常采用对数形式。作者指出,平移量除以原始宽高是为了按比例平移,而放缩比例取对数可以将小于1和大于1的值映射到正负区间,有利于模型学习。
该博客探讨了在目标检测中,为什么bounding box regression的label通常采用对数形式。作者指出,平移量除以原始宽高是为了按比例平移,而放缩比例取对数可以将小于1和大于1的值映射到正负区间,有利于模型学习。
Bounding box regress这篇博客讲得很清楚https://blog.youkuaiyun.com/zijin0802034/article/details/77685438,但还是很疑惑为什么label设计成对数形式
原论文没有过多解释:

博客中的解释如下:
我的理解:
bounding box regression就是在已知proposal特征的前提下,训练模型使模型可以根据特征对proposal进行平移和放缩。
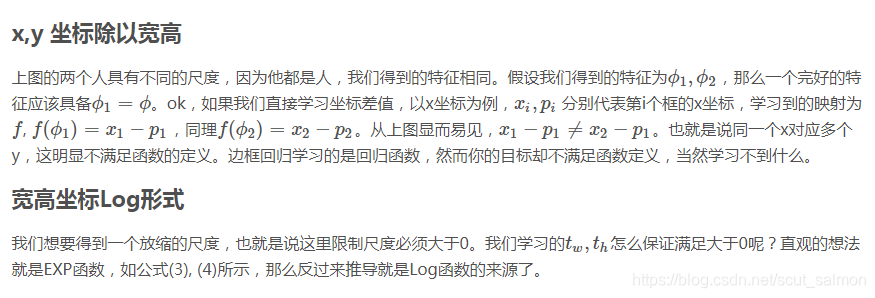
平移量除以原始宽高
如博客上所说,proposal平移多少若不除以原来的宽高,相同特征的平移量就都是相同的,这会显然不合理,应该按照原图尺寸按比例平移
放缩比例取对数
放缩比例肯定是大于0的,只是大于1还是小于1的区别,个人觉得没必要如博客所说限制尺度大于0,反而应该让放缩比例(label)分布有正有负。满足这一操作的运算当然是取对数了,小于1则label为负,大于1则label为正
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1053
1053

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









