



基于Arduino Uno微控制器的旋转运动机械能试验装置开发
摘要
本研究旨在开发一种基于传感器并由Arduino Uno控制的旋转运动机械能实验装置。该研究动机源于机械能的学习通常由教师采用讲授法进行,而学生难以理解被视为抽象的机械能概念。该装置的工作原理是使弹珠在铁制轨道上滑行。该装置通过光电二极管传感器和激光二极管来测量弹珠滑行的时间,从而获得平动动能、转动动能和势能的数值。本研究在里亚u大学FKIP物理教育实验室进行。研究所采用的方法为研究与开发方法,并使用了实证测试数据分析。根据平均时间的测量结果,得到0.0834秒,准确度水平为0.9417,属于非常准确。该机械能实验装置成功验证了由势能、平动动能和转动动能之和得到的机械能保持恒定。
1. 引言
物理学是未来技术进步所需的基础知识,而发展创造力是将其融入学习的一种方式[1]。学习物理需要学生积极参与,以增强他们对物理概念的理解。对于高中生而言,当学习主题较为抽象且无法用肉眼直接观察时,物理概念的学习难度会越来越大[2][3]。在使用充足的实验课工具时,学生将加深他们的知识[4]。
实验工具的开发对教师辅助物理学习过程非常重要,同时也能增强学生的理解能力,使学生能够批判性地分析所获得的数据。开发出完整教学媒体的结果可使学生更好地理解,并有助于教师和学生开展学习过程。开发教学媒体对于帮助物理学习过程至关重要 [5][6]。
教师仅使用传统方法(讲授法)进行教学,由于缺乏实践工具,教师很少提供实验课,而且根据教师的看法,通过实验课实现学习目标较为困难。这与已开展的研究结果一致,即存在一些障碍导致教师不愿意开展实验课[7]。对机械能基本概念的理解通常通过几种标准化测试来衡量,包括能量与动量概念调查[8]和力学基线测试[9]。
机械能研究已经开展,旨在开发基于Arduino Uno微控制器的机械能测量装置,但该研究仅考虑了平动中的机械能,并且仅基于一个高度点[10]。另一个还开展了通过制作迷你过山车(Miroco)装置作为计算平动中机械能相关加速度的实验媒介的研究,所开发的装置在记录时间方面仍是手动的,并未使用传感器来进行具有高精度水平的实验计数 [11]。
上述已完成的研究仍存在不足之处,因此研究人员希望开发一种使用计时传感器并由Arduino Uno微控制器处理的机械能实验装置。该实验装置利用Arduino Uno微控制器生成精确的数据,并将所开发的装置作为教学媒体,用于计算势能、平动动能、转动动能和机械能的替代媒介。
2. 方法论
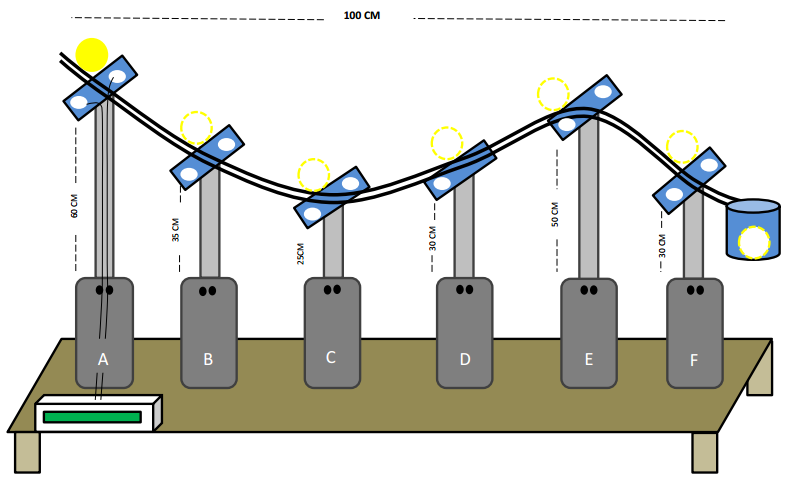
本研究属于研究与开发。所开发的产品是一种基于Arduino Uno微控制器的旋转运动机械能实验装置。旋转运动机械能实验装置的制造分为两个阶段:第一阶段是硬件部分,即实验装置的物理设计;第二阶段是软件部分,即Arduino Uno微控制器的程序设计。该机械能实验装置的设计采用轻质铁材料制成,便于携带,长度为100 cm。该装置所使用的物体为质量2.2克、直径2.05 cm的小球。产品设计如图1所示。
图1中实验装置的物理设计首先需关注所制作轨道上的摩擦力,同时注意适用于实验仪器的机械能概念。软件设计部分由Arduino Uno微控制器处理输入信号,输出结果可显示物体通过轨道所需的时间、势能、平动动能、转动动能以及机械能,并在液晶显示屏上呈现。
3. 结果与讨论
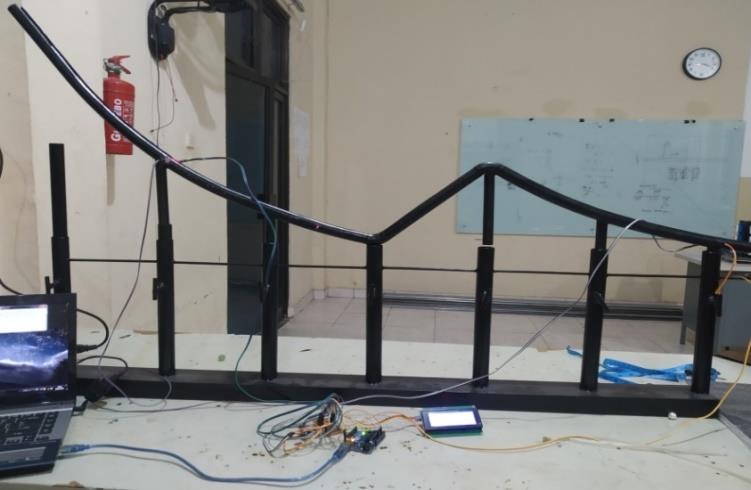
本研究设计的工具结果是开发了一种旋转运动中的机械能实验装置,该装置配备有计时传感器和Arduino Uno微控制器,其程序如图2所示。
已开发的实验装置能够显示时间、势能、平动动能、转动动能和机械能的结果,如图3所示。
所获得的测量结果用于分析旋转运动中机械能的概念。利用所开发的实验工具的测量结果,可以计算出势能、平动动能、转动动能和机械能等物理变量。测量数据见下文表1。该机械能装置实验使用相同的物体和高度进行了5次。
表1. 测量结果和实验计算。
| No | t (s) | EP (J) | Ek trans (J) | Ek rot (J) | 电磁(J) | A |
|---|---|---|---|---|---|---|
| 1 | 0,0870 | 0,0108 | 0,5813 | 0,0065 | 0,5986 | 0,9569 |
| 2 | 0,0770 | 0,0108 | 0,7421 | 0,0065 | 0,7594 | 0,9236 |
| 3 | 0.0875 | 0,0108 | 0,5747 | 0,0065 | 0,5920 | 0,9509 |
| 4 | 0,0880 | 0,0108 | 0,5682 | 0,0065 | 0,5855 | 0,9449 |
| 5 | 0,0775 | 0,0108 | 0,7333 | 0,0065 | 0,7506 | 0,9293 |
| 平均值 | 0,0834 | 0,0108 | 0,6399 | 0,0065 | 0,6572 | 0,9417 |
根据所获得的测量结果,得到的平均时间为0.0834秒,因此准确度水平的平均值为 0.9417。从测量中获得的分析结果表明,工作时间传感器能够良好运行。
在第一次实验中,测得时间 t = 0.0870 s,准确度水平为 0.9569。因此,使用光电二极管传感器和激光二极管进行时间测量的结果可归类为非常准确。根据时间测量数据,势能为 0.0108 J,平动动能为 0.5813 J,转动动能为 0.0065 J,机械能为 0.5986 J。
在第二次和第五次实验中获得的结果与第一、第三和第四次实验相差0.01。数据的精度也相差0.02 ‐ 0.03。然而,经过5次实验,获得了高精度结果。实验工具中使用传感器相比使用普通秒表对测量结果有显著影响。
通过进行5次实验获得的势能得到了相同的结果。实验中质量输入和高度保持恒定。影响势能的物理变量是质量、重力加速度和高度,因此无法证明物体距离地球表面越高,其势能越大;反之,越低或接近地球表面,势能也越小。
经过5次实验测得的转动动能,若以小数点后四位进行校准,则结果相同;若以小数点后六位进行校准,所得结果将相差约0.000001 ‐ 0.000002。转动动能的物理变量受惯性和角速度影响。惯性受静摩擦、质量、重力加速度、质点半径和加速度的值影响。所有影响变量均为恒定,唯独加速度因受速度和时间影响而变化。角速度受速度和质点半径影响。与惯性类似,质点半径的输入值为恒定。上述部分概念影响了转动动能的数值,从而获得相同的测量结果。
根据测量结果得到的平动动能平均值为0.6399 J。动能是每个运动物体所具有的能量。换句话说,只有当物体在运动时才会产生动能。物体运动越快,其产生的动能越大;反之,物体运动越慢,动能越小。从第一次到第五次实验所获得的测量数据表明,上述理论是正确的,测量时间越短,平动动能越大。
根据测量结果,获得的机械能平均值为0.6572 焦耳。测量数据共进行了5次实验,发现到达轨道末端的时间越短,产生的机械能越大。如果测得的时间较长,是因为小球在滑动过程中与轨道壁之间存在摩擦,摩擦会导致总机械能减少。实验共进行了5次,得到的机械能由势能、平动动能和转动动能组成,这些能量保持恒定。
4. 结论
机械能实验装置的开发结果良好,且准确率较高。然而,势能和转动动能的测量结果与理论不符。该机械能实验装置成功验证了由总势能、平动动能和转动动能得到的机械能是恒定的;若测得的时间较长,是因为小球在滑动过程中,弹珠与轨道壁之间存在摩擦力,该摩擦力会减小总机械能。平动动能实验可以证明,物体运动越快,其产生的动能越大;反之,物体运动越慢,其动能越小。


















 986
986

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









