



ROS笔记:
前言
在机器人户外导航开发中,拥有一个直观的卫星地图背景是刚需。虽然 ROS 社区有 rviz_satellite 和 mapviz 等工具,但在国内网络环境下,直接使用 Google Maps 或 Stamen 地图源往往会遇到 "Bad Gateway" 或 "Forbidden" 的问题。
本文将总结一套在 ROS Noetic 环境下,稳定接入 高德地图(高清卫星图+中文路网标注) 的完整技术路线。涵盖了在线直连、离线瓦片制作(QGIS方案)以及 RViz/Mapviz 的详细配置避坑指南。
一、 最简单有效的方法:RViz 直连与配置
如果你只需要快速在 RViz 中看一眼地图,并且网络环境允许,使用 rviz_satellite 插件是最简单的方法。
1. 安装插件
首先安装适用于 ROS Noetic 的卫星图插件:
sudo apt install ros-noetic-rviz-satellite
2. 获取高德地图 URL
高德地图的 XYZ 瓦片服务非常稳定,且无需申请 Key。为了获得“卫星底图+路网标注”的效果,我们通常使用以下两个链接:
-
卫星底图 (style=6):
http://webst01.is.autonavi.com/appmaptile?style=6&x={x}&y={y}&z={z} -
路网标注 (style=8):
http://webst01.is.autonavi.com/appmaptile?style=8&x={x}&y={y}&z={z}
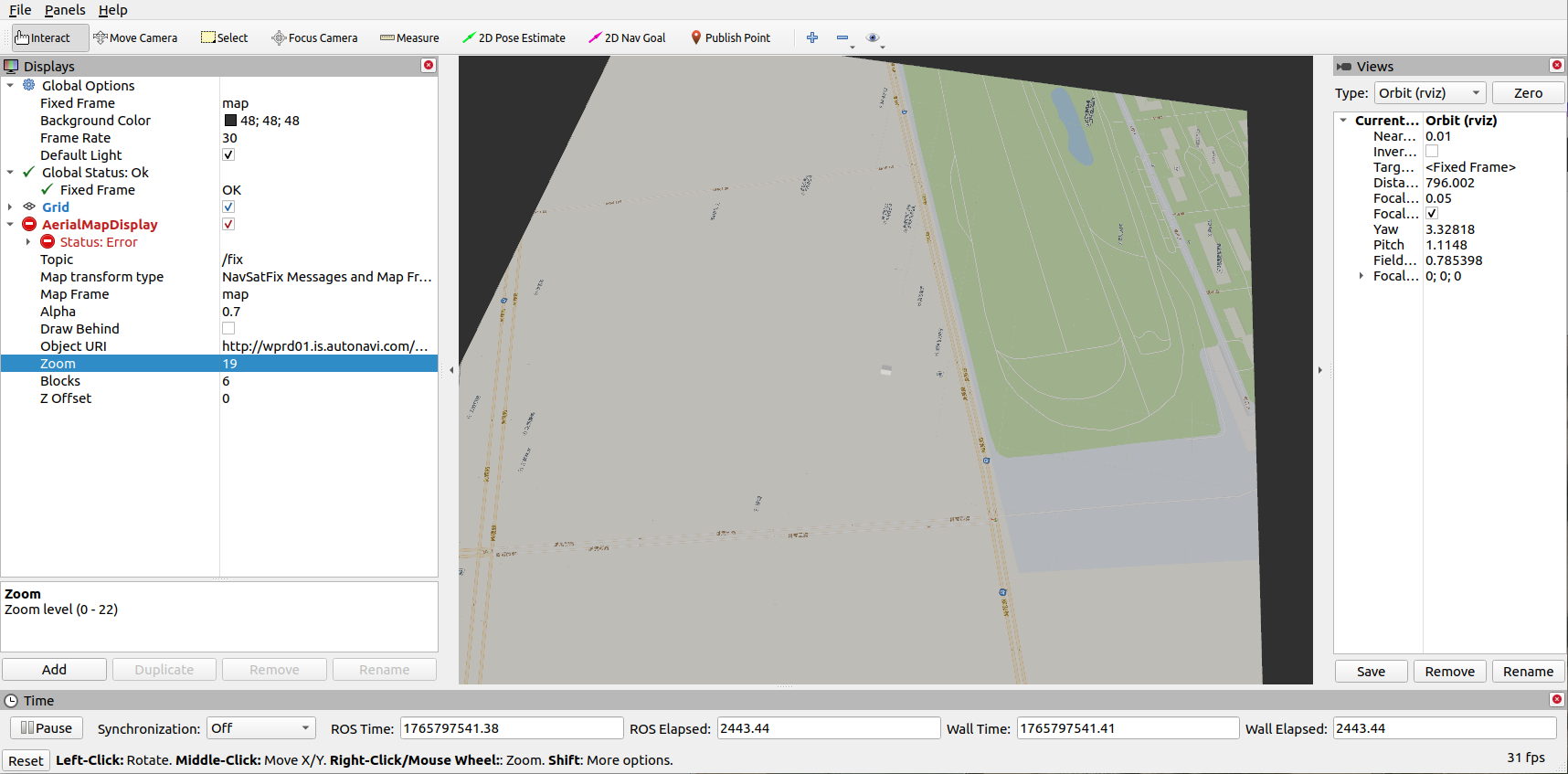
3. RViz 配置核心参数
启动 RViz 后,点击 Add -> AerialMapDisplay。重点配置以下参数,否则地图不会显示:
-
Topic (关键): 必须填入你的 GPS 话题(如
/fix或/gps/fix)。插件需要根据 GPS 定位来决定加载哪里的地图。 -
Map URL: 填入上面的高德 URL。
-
Zoom: 设置为 18 或 19。
-
注意:高德卫星图的高清层级通常在 18-19 级,设置过小(如 0-10)可能导致加载为空白。
-
-
Blocks: 建议设为 3 或 4,表示加载机器人周围多少块瓦片。
-
避坑提示:
rviz_satellite对本地文件路径 (file://) 的支持极其挑剔,容易报Invalid Object URI。如果你想加载离线地图到 RViz,请看下文的“本地服务器”大法。
二、 进阶方案:制作高清离线瓦片地图 (QGIS + GDAL)
为了彻底摆脱对网络的依赖(例如在无网的户外调试),我们需要将地图“下载”到本地。
1. QGIS 配置地图源
在 Ubuntu 或 Windows 上安装 QGIS,在左侧 XYZ Tiles 右键新建连接:
-
名称: Amap Satellite
-
URL:
http://webst01.is.autonavi.com/appmaptile?style=6&x={x}&y={y}&z={z} -
同理添加
style=8的路网图层,并将两者叠加。
2. 导出高清 GeoTIFF (关键步骤)
不要直接保存工程,而是使用 导出为图像 (Export Map to Image) 功能:
-
范围: 选择你需要下载的区域(如大学校区)。
-
分辨率 (Resolution): 这是最高清的关键! 手动将水平/垂直分辨率改为 0.000005 (约 0.5m/px) 或 0.000002 (约 0.2m/px)。
-
检查: 确保 Output Width 在 5000-8000 像素左右。
-
-
格式: 选择
.tif格式,并勾选“附加地理参考信息”。
3. 瓦片切割 (gdal2tiles)
在终端中使用 GDAL 工具将巨大的 TIF 图片切割为 Mapviz/RViz 可用的瓦片。
情况 A:你的 GDAL 版本较新 (支持 --xyz)
gdal2tiles.py --xyz -z 15-19 my_map.tif output_tiles/
情况 B:你的 GDAL 版本较旧 (Ubuntu 20.04 默认情况)
旧版生成的是 TMS 格式(Y轴翻转),会导致地图上下颠倒。需要先生成 TMS,再用 Python 脚本转为 XYZ:
# 1. 生成 TMS 瓦片
gdal2tiles.py -z 15-19 my_map.tif output_temp/
# 2. 运行脚本进行翻转 (脚本逻辑:y_new = 2^z - 1 - y_old)
# (此处省略具体脚本代码,核心是重命名文件)
三、 Mapviz 的使用与参数细节
Mapviz 相比 RViz,天生更适合做 2D 平面导航仪表盘,它对离线瓦片的支持更加友好。
1. 配置坐标原点 (Initialize Origin)
Mapviz 必须知道 WGS84 (经纬度) 与 ROS /map 坐标系的转换关系。需要在 launch 文件中配置 swri_transform_util:
<node pkg="swri_transform_util" type="initialize_origin.py" name="initialize_origin">
<param name="local_xy_frame" value="/map"/>
<param name="local_xy_origin" value="auto"/> </node>
2. 加载离线地图 (tile_map)
在 Mapviz 中添加 tile_map 插件:
-
Source: 选择
Custom WMTS Source(不要选默认的 Stamen 或 Tianditu)。 -
Base URL (重点):
Mapviz 的 URL 格式支持占位符。如果你使用的是本地路径:
file:///home/user/map_data/{level}/{x}/{y}.png或者
file:///home/user/map_data/{z}/{x}/{y}.png技术细节:虽然大部分工具通用
{z}代表缩放等级,但在某些版本的 Mapviz 配置文件中,参数名明确写作level。如果发现加载不出图片,请尝试将 URL 中的{z}修改为{level},这往往是解决“路径正确但无图”的最后一把钥匙。
3. 在 RViz 中使用离线地图的“绝招”
前面提到 RViz 对 file:// 支持不好。要在 RViz 中用这套离线瓦片,只需在瓦片目录下运行一行 Python 命令,开启一个微型 HTTP 服务器:
Bash
cd /path/to/output_tiles
python3 -m http.server 8000
然后在 RViz 的 Map URL 中填入:
http://127.0.0.1:8000/{z}/{x}/{y}.png
这样,RViz 会以为自己在访问网络地图,从而完美加载你的离线数据!
总结
-
想省事:直接用
rviz_satellite+ 高德在线 URL。 -
要素全:用 QGIS 叠加“卫星+路网”,导出高清 TIF。
-
兼容性:GDAL 切片时注意 XYZ 格式,旧版本需脚本翻转 Y 轴。
-
调试:Mapviz 中注意
{z}和{level}的切换;RViz 中推荐用python http.server挂载本地地图。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









