




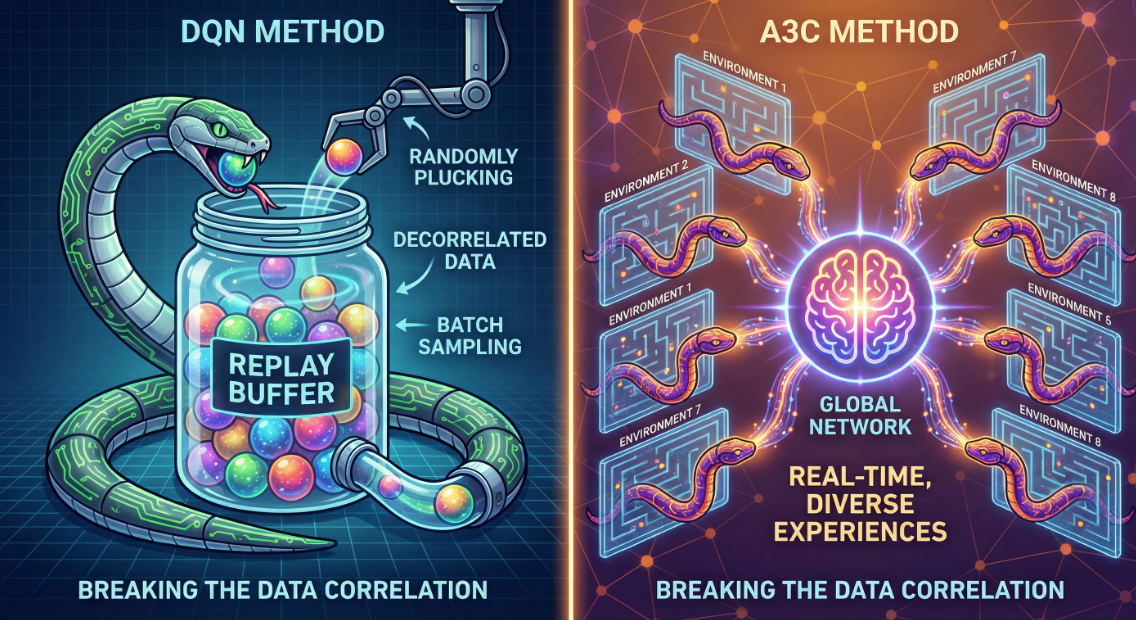
在 DQN 称霸的时代,我们为了解决强化学习中样本**“非独立同分布(Non-IID)”**的问题,不得不引入了一个巨大的外挂硬盘——经验回放池(Experience Replay Buffer)。
然而,2016 年 DeepMind 推出 A3C(Asynchronous Advantage Actor-Critic),就像一道闪电划破夜空。它告诉我们:只要你的“分身”够多,你就不需要“记忆”。
A3C 和随后 OpenAI 改进的 A2C,不仅是 Actor-Critic 架构的集大成者,更是一次关于**“并行计算如何改变算法收敛性”**的数学实验。
今天,我们深入公式内部,拆解并行化带来的质变。
一、回顾 Actor-Critic 的数学痛点
在进入并行化之前,我们必须先写出 Actor-Critic (AC) 的核心目标函数。AC 架构由两个网络组成:
- Actor (πθ\pi_\thetaπθ):负责输出动作概率。
- Critic (VwV_wVw):负责评价状态价值。
我们优化的目标是最大化期望回报 J(θ)J(\theta)J(θ)。根据策略梯度定理,Actor 的梯度更新公式为:
∇θJ(θ)=Est,at∼π[∇θlogπθ(at∣st)⋅A(st,at)] \nabla_\theta J(\theta) = \mathbb{E}_{s_t, a_t \sim \pi} \left[ \nabla_\theta \log \pi_\theta(a_t | s_t) \cdot A(s_t, a_t) \right] ∇θJ(θ)=Est,at∼π[∇θlogπθ(at∣st)⋅A(st,at)]
其中,A(st,at)A(s_t, a_t)A(st,at) 是优势函数(Advantage Function),它衡量了“在这个状态下选动作 ata_tat,比平均情况好多少”。在实际计算中,我们用 TD Error 来估计它:
A(st,at)≈rt+γVw(st+1)−Vw(st) A(s_t, a_t) \approx r_t + \gamma V_w(s_{t+1}) - V_w(s_t) A(st,at)≈rt+γVw(st+1)−Vw(st)
痛点在于:
如果不使用 Replay Buffer,单个 Agent 产生的数据是高度**时间相关(Temporally Correlated)**的。
st→st+1→st+2… s_t \rightarrow s_{t+1} \rightarrow s_{t+2} \dots st→st+1→st+2…
这种强相关性会导致梯度下降的方向跑偏(Bias),让神经网络陷入局部最优或震荡。但如果使用 Replay Buffer,我们又变成了 Off-Policy(异策略),这在处理连续动作或复杂策略时往往不稳定。
A3C 的出现,就是为了解决这个悖论:如何在 On-Policy(在线策略)的前提下,打破数据相关性?
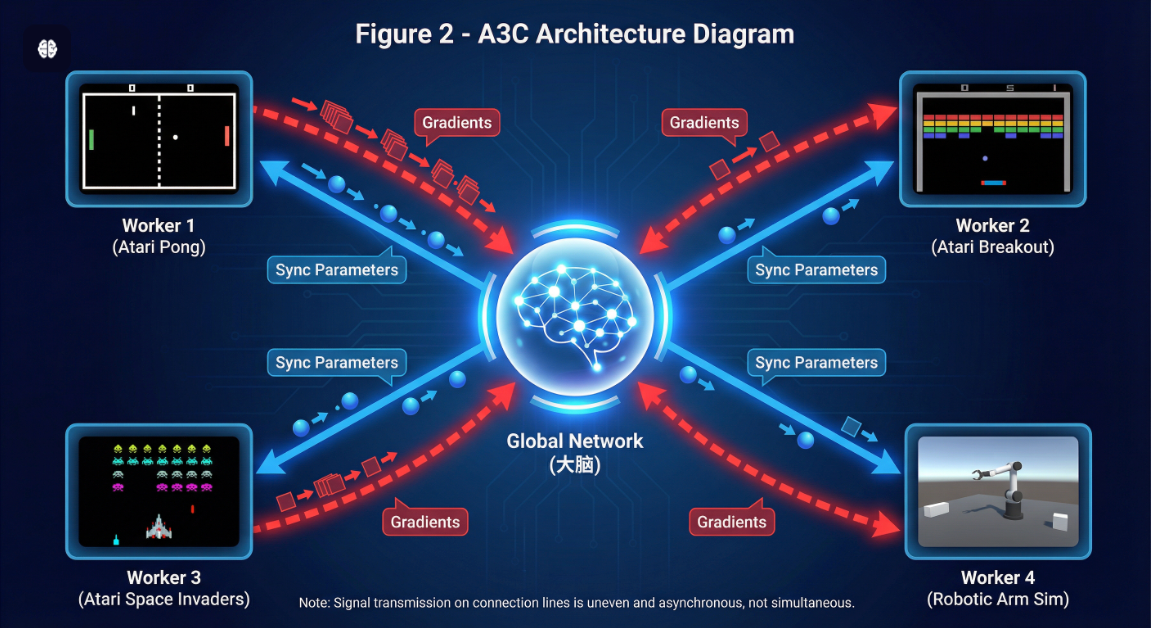
二、A3C:多线程的梯度异步轰炸
A3C 的全称是 Asynchronous Advantage Actor-Critic。它的核心逻辑是:创建多个 Worker(子线程),每个 Worker 拥有独立的完整环境实例。
1. N-Step 回报:平衡偏差与方差
A3C 并不使用单步 TD,而是通常使用 N-Step Return 来计算目标值。这可以让奖励传播得更快。
对于某个 Worker,在 ttt 时刻,它向前探索 nnn 步,计算截断的累积回报 Gt(n)G_t^{(n)}Gt(n):
Gt(n)=∑k=0n−1γkrt+k+γnVw(st+n) G_t^{(n)} = \sum_{k=0}^{n-1} \gamma^k r_{t+k} + \gamma^n V_w(s_{t+n}) Gt(n)=k=0∑n−1γkrt+k+γnVw(st+n)
这里,前 nnn 步是真实的奖励(低偏差,高方差),最后加上的是 Critic 的预测值 Vw(st+n)V_w(s_{t+n})Vw(st+n)(引入偏差,降低方差)。
2. 损失函数的构造
每个 Worker 独立计算累积梯度。总损失函数 LLL 由三部分组成:策略损失、价值损失和熵正则项。
L=Lπ⏟Policy Loss+12Lv⏟Value Loss−βH(π)⏟Entropy L = \underbrace{L_\pi}_{\text{Policy Loss}} + \frac{1}{2} \underbrace{L_v}_{\text{Value Loss}} - \beta \underbrace{H(\pi)}_{\text{Entropy}} L=Policy LossLπ+21Value LossLv−βEntropyH(π)
展开来看:
-
策略梯度损失(我们要最大化目标,所以 Loss 加负号):
Lπ=−logπθ(at∣st)⋅(Gt(n)−Vw(st)) L_\pi = - \log \pi_\theta(a_t | s_t) \cdot (G_t^{(n)} - V_w(s_t)) Lπ=−logπθ(at∣st)⋅(Gt(n)−Vw(st))
(注意:这里的 Gt(n)−Vw(st)G_t^{(n)} - V_w(s_t)Gt(n)−Vw(st) 即为 N-step 的优势函数估计) -
价值函数损失(MSE):
Lv=(Gt(n)−Vw(st))2 L_v = (G_t^{(n)} - V_w(s_t))^2 Lv=(Gt(n)−Vw(st))2 -
熵正则项(鼓励探索,防止过早收敛):
H(π)=−∑πθ(a∣st)logπθ(a∣st) H(\pi) = - \sum \pi_\theta(a | s_t) \log \pi_\theta(a | s_t) H(π)=−∑πθ(a∣st)logπθ(a∣st)
3. 异步更新(Hogwild!)
这是 A3C 最狂野的地方。Worker 计算出梯度 dθd\thetadθ 后,直接推送到全局网络(Global Network):
θglobal←θglobal−η⋅∇L(θworker) \theta_{global} \leftarrow \theta_{global} - \eta \cdot \nabla L(\theta_{worker}) θglobal←θglobal−η⋅∇L(θworker)
然后,Worker 立刻把最新的 θglobal\theta_{global}θglobal 复制回自己身上,继续跑。
关键点: 这个过程是异步的,没有锁(Lock-free)。这意味着 Worker A 更新参数时,Worker B 可能正在用旧参数计算梯度。
这种“混乱”不仅没有毁掉算法,反而引入了额外的噪声,起到了类似 SGD 中噪声的作用,帮助逃离局部极小值。
三、A2C:同步的理性回归
A3C 很强,但 Google DeepMind 的工程师在实现时发现:异步编程太痛苦了,而且 Python 的多线程受到 GIL(全局解释器锁)的限制,很难利用 GPU 的并行加速能力。
OpenAI 的研究者后来提出了 A2C (Advantage Actor-Critic),去掉了第一个 “Asynchronous”。他们发现:异步并不是必须的,并行才是核心。
1. 同步更新机制
A2C 让所有 Worker 必须“齐步走”。
- 所有 Worker 并行执行动作,产生一批数据。
- 等到所有 Worker 都完成一步(或 n 步)后。
- 将所有数据打包成一个 Batch。
- 利用 GPU 对这个大 Batch 进行一次高效的前向和反向传播。
2. 数学上的等价性
A2C 的梯度更新本质上是所有 Worker 梯度的平均值:
∇θJ(θ)batch=1N∑i=1N∇θJ(θ)i \nabla_\theta J(\theta)_{batch} = \frac{1}{N} \sum_{i=1}^{N} \nabla_\theta J(\theta)_i ∇θJ(θ)batch=N1i=1∑N∇θJ(θ)i
这在数学上比 A3C 更稳健。A3C 因为参数滞后(Laggy Updates),其实是在优化一个“过时”的策略,而 A2C 保证了当前计算梯度的策略和产生数据的策略是完全一致的。
公式对比:
- A3C: θt+1=θt+α∇J(θt−τ)\theta_{t+1} = \theta_t + \alpha \nabla J(\theta_{t-\tau})θt+1=θt+α∇J(θt−τ) (存在 τ\tauτ 的延迟)
- A2C: θt+1=θt+α1N∑∇Ji(θt)\theta_{t+1} = \theta_t + \alpha \frac{1}{N}\sum \nabla J_i(\theta_t)θt+1=θt+αN1∑∇Ji(θt) (无延迟)
四、并行化到底带来了什么?
我们回到标题。并行化(无论是 A3C 还是 A2C)到底解决了什么根本问题?
1. 遍历性的增强 (Ergodicity)
在数学上,强化学习希望 Agent 能够遍历状态空间 SSS。单智能体容易陷入环境的某一个死角(Sub-optimal policy)。
P(s∣πparallel)≈1N∑P(s∣πi) P(s | \pi_{parallel}) \approx \frac{1}{N} \sum P(s | \pi_i) P(s∣πparallel)≈N1∑P(s∣πi)
NNN 个智能体同时在探索不同的角落,相当于极大地拓宽了采样分布的支撑集(Support),这让神经网络能学到更普适的特征,而不是死记硬背某一条路径。
2. 替代经验回放 (Replacing Experience Replay)
DQN 需要 Replay Buffer 来打破 Correlation(st,st+1)Correlation(s_t, s_{t+1})Correlation(st,st+1)。
A3C/A2C 通过并行采样,使得在一个 Batch 内的数据来源是:
Batch={(st1,at1),(st2,at2),…,(stN,atN)} Batch = \{ (s_t^1, a_t^1), (s_t^2, a_t^2), \dots, (s_t^N, a_t^N) \} Batch={(st1,at1),(st2,at2),…,(stN,atN)}
因为环境 111 和环境 NNN 是独立的,所以 Correlation(st1,stN)≈0Correlation(s_t^1, s_t^N) \approx 0Correlation(st1,stN)≈0。
这使得我们可以在 On-Policy 的条件下,直接训练网络,而不需要在内存中存储数百万条过期的历史数据。
结语:算力换算法的胜利
A2C 和 A3C 的故事告诉我们,有时候数学上的难题(数据相关性、非平稳性),可以通过系统架构上的改变(并行化)来优雅解决。
从公式上看,它们只是在 Policy Gradient 的基础上加了一个求和符号 ∑\sum∑;但从本质上看,它们开启了**大规模分布式强化学习(Distributed RL)**的先河。后来的 PPO、IMPALA 甚至 AlphaStar,其根基都植根于这种并行采样的思想之中。
掌握 A2C,你就不再只是在训练一个 Agent,你是在指挥一支军团。

















 1941
1941

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









