




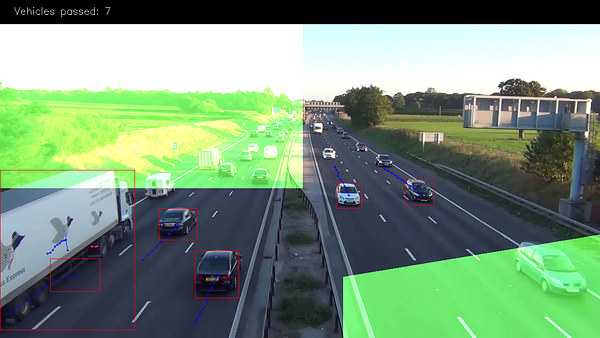
图像上的这个绿色面具是出口区,是我们计算车辆的地方。例如,我们只计算长度大于3个点的路径(去除一些噪声)和绿色区域中的第四个路径。
我们使用掩码的原因是它的许多操作比矢量算法有效和简单。只需使用“二进制”和“操作”来检查该区域中的那个点,就可以了。下面是我们如何设置:
EXIT_PTS = np.array([
[[732, 720], [732, 590], [1280, 500], [1280, 720]],
[[0, 400], [645, 400], [645, 0], [0, 0]]
])
base = np.zeros(SHAPE + (3,), dtype='uint8')
exit_mask = cv2.fillPoly(base, EXIT_PTS, (255, 255, 255))[:, :, 0]连接点:
new_pathes = []
for path in self.pathes:
_min = 999999
_match = None
for p in points:
if len(path) == 1:
# distance from last point to current
d = utils.distance(p[0], path[-1][0])
else:
# based on 2 prev points predict next point and calculate
# distance from predicted next point to current
xn = 2 * path[-1][0][0] - path[-2][0][0]
yn = 2 * path[-1][0][1] - path[-2][0][1]
d = utils.distance(
p[0], (xn, yn),
x_weight=self.x_weight,
y_weight=self.y_weight
)
if d &l 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4568
4568

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









