




文章目录
一. 采用stm32F103和HC-SR04超声波模块, 使用标准库或HAL库+ 定时器中断,完成1或2路的超声波障碍物测距功能。
1)测试数据包含噪声,程序需要进行滤波处理;将测距数值通过串口上传到上位机串口助手;
2)根据障碍物距离远近,控制一个蜂鸣器(可以用LED灯代替)发出频率不同的声音(或LED不同闪烁),即输出占空比变化的PWM波形;
3)在没有超声波模块硬件的场景下,先使用Keil中的仿真逻辑分析仪,观察分析对应管脚上的时序波形,判读是否符合协议规范。
二. 当前智能汽车上一般配置有12路超声波雷达,这些专用超声波雷达内置了MCU,直接输出数字化的测距结果,一般硬件接口采用串口RS485,通信协议采用modbus。请思考:
1)RS485与RS232(UART)有什么不同?
2)Modbus协议是什么?
3)如果让你设计一款 12路车载超声波雷达,采用 stm32F103+HC-SR04超声波模块,对外提供RS485和Modbus协议,你的设计方案是什么?
一. 采用stm32F103和HC-SR04超声波模块, 使用标准库或HAL库+ 定时器中断,完成1路的超声波障碍物测距功能。
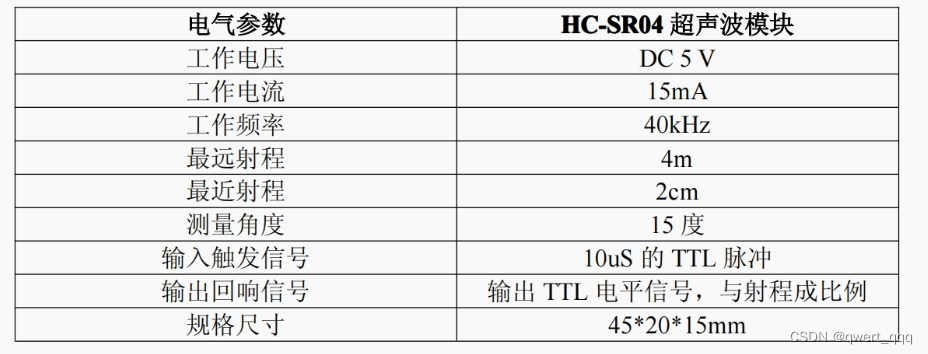
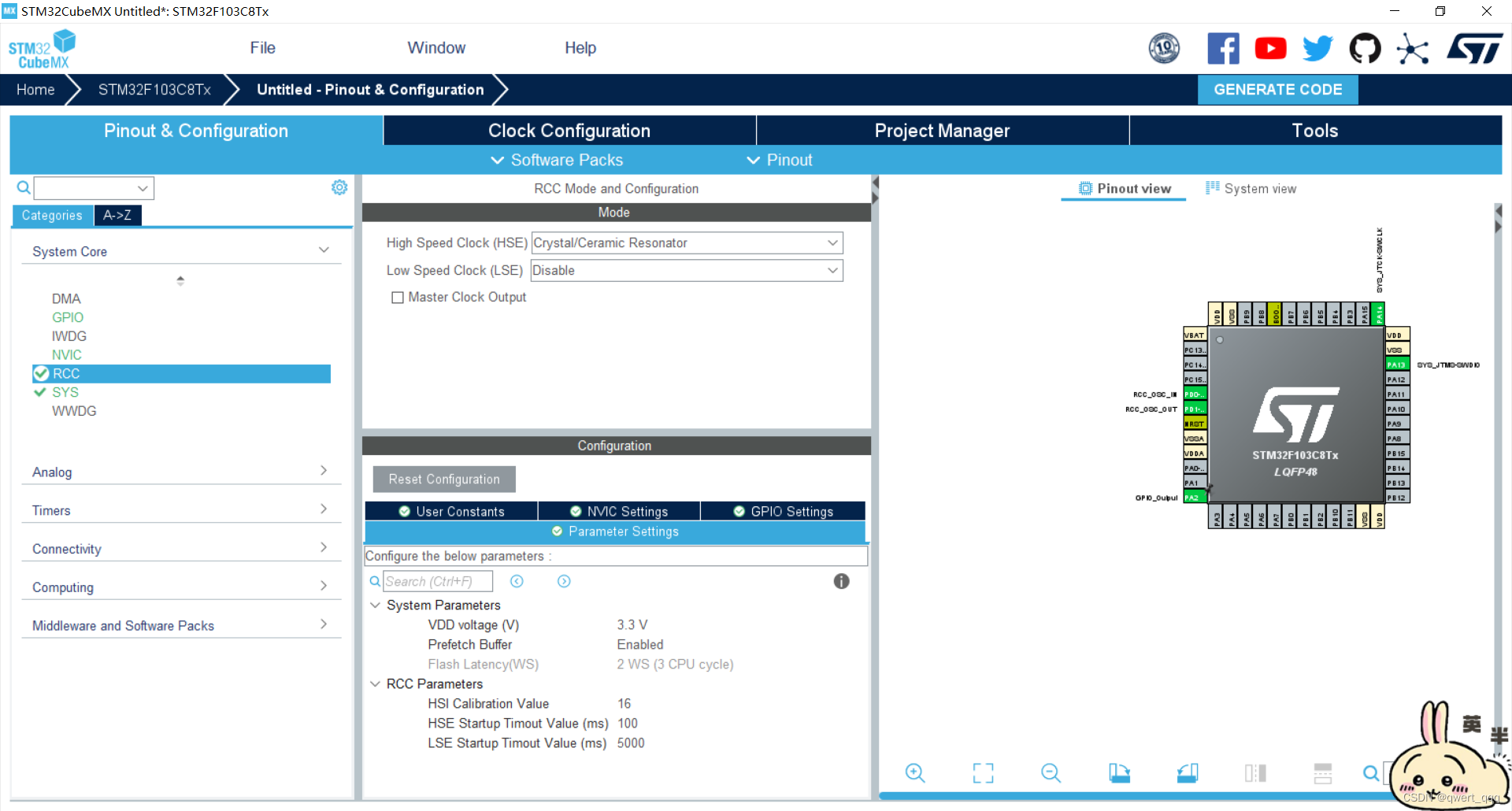
1. HC-SR04超声波模块电气参数
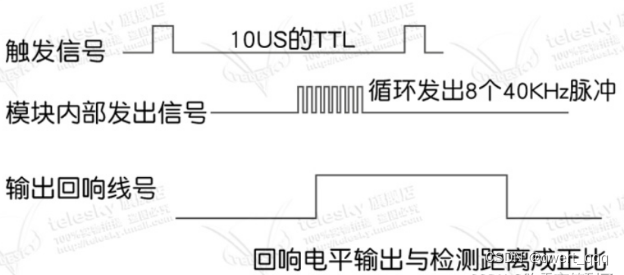
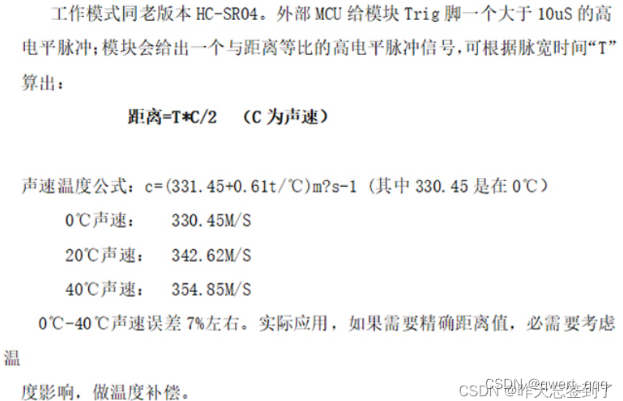
2. 工作原理
3. 使用HAL库实现
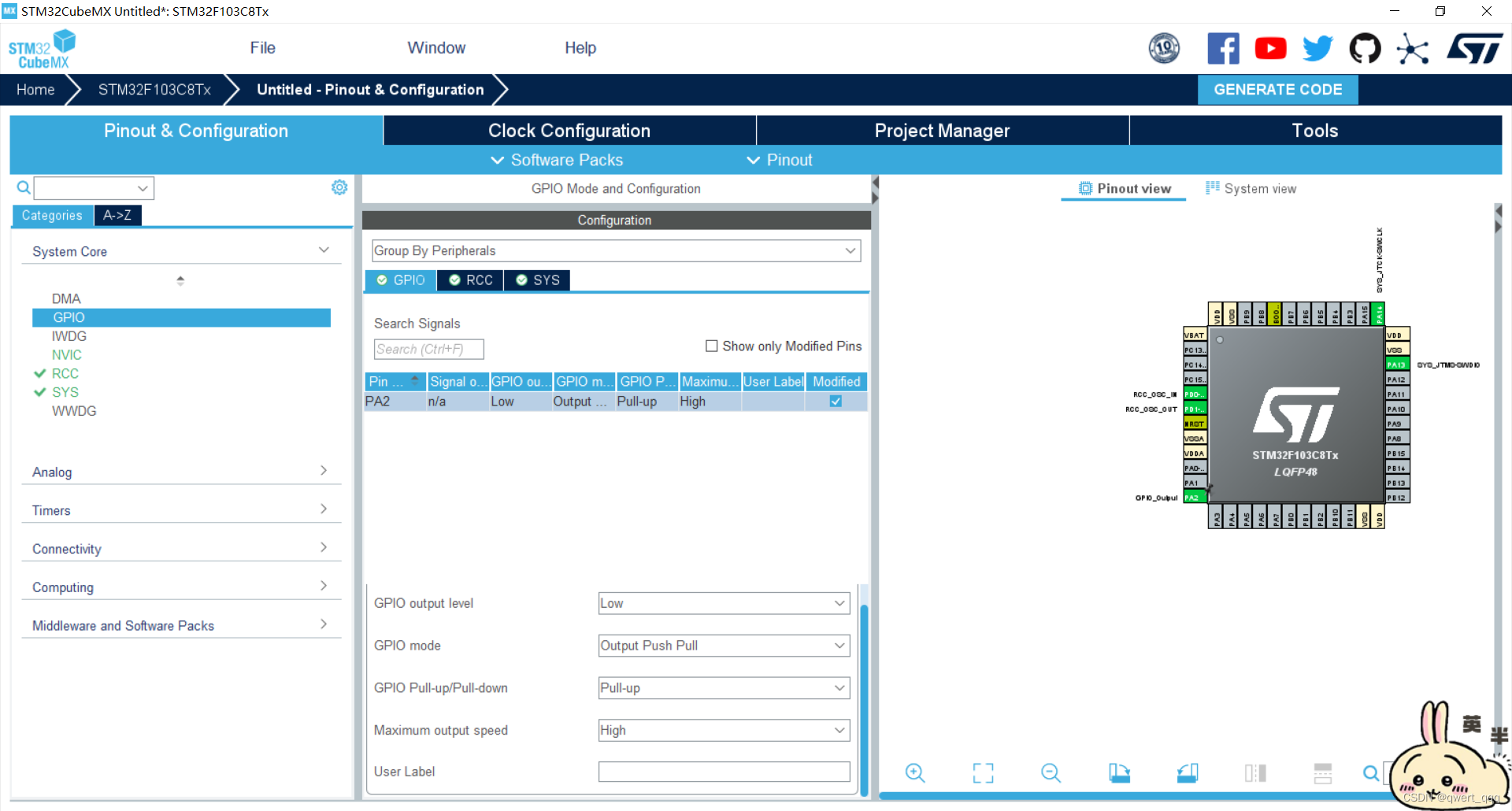
选一个GPIO,这里选PA2
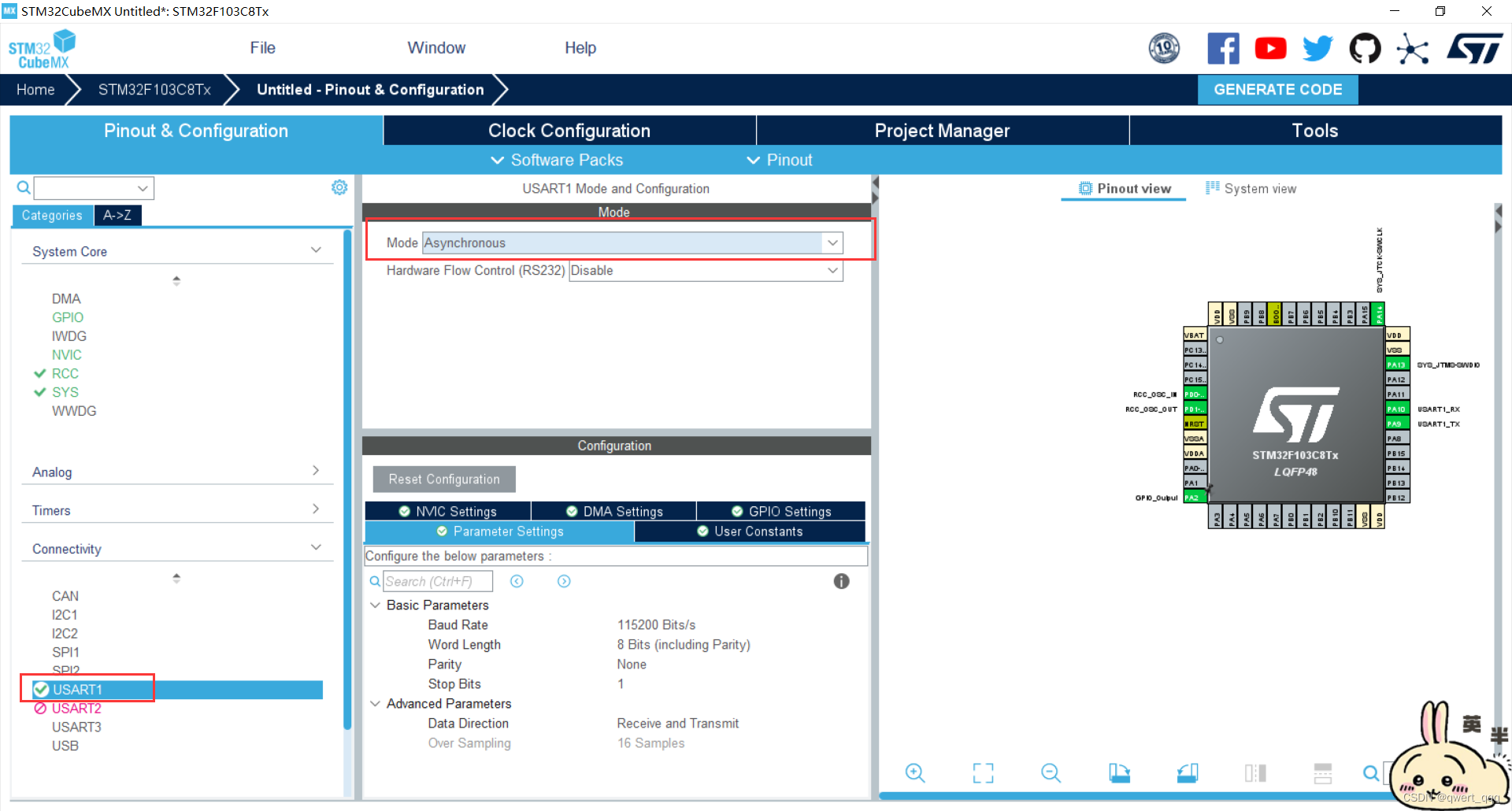
配置串口
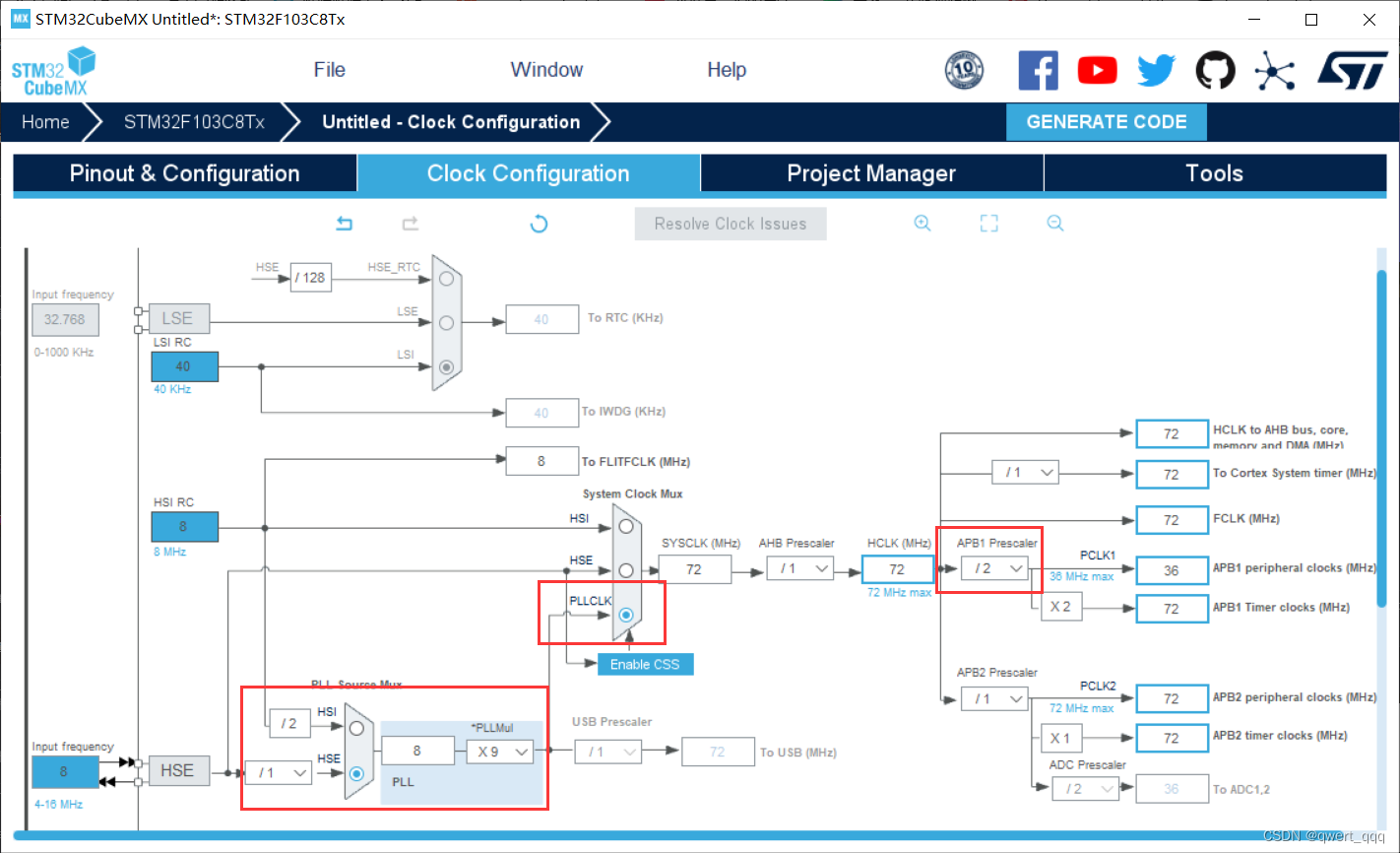
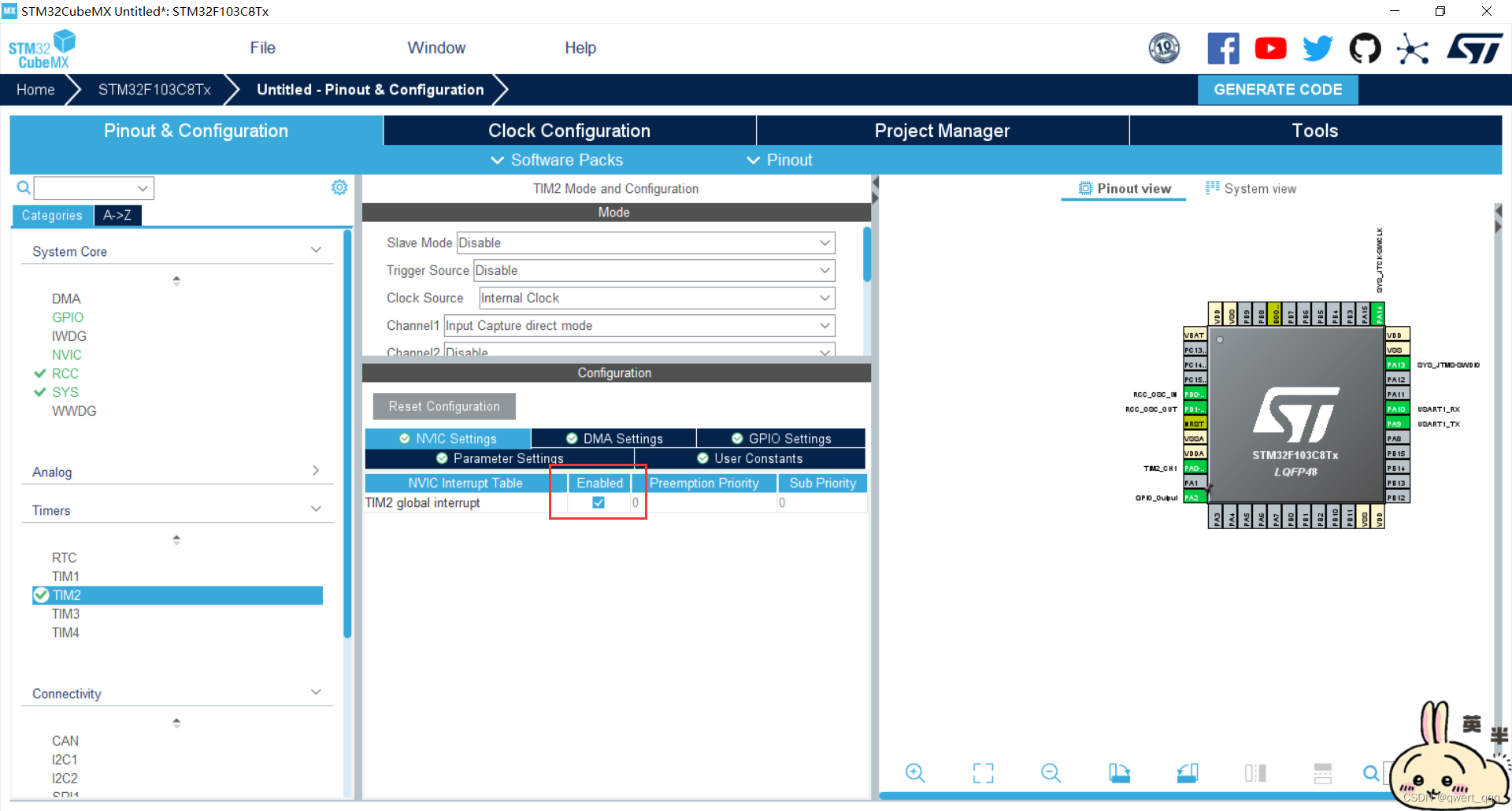
使用定时器2 通道1 并开启定时器中断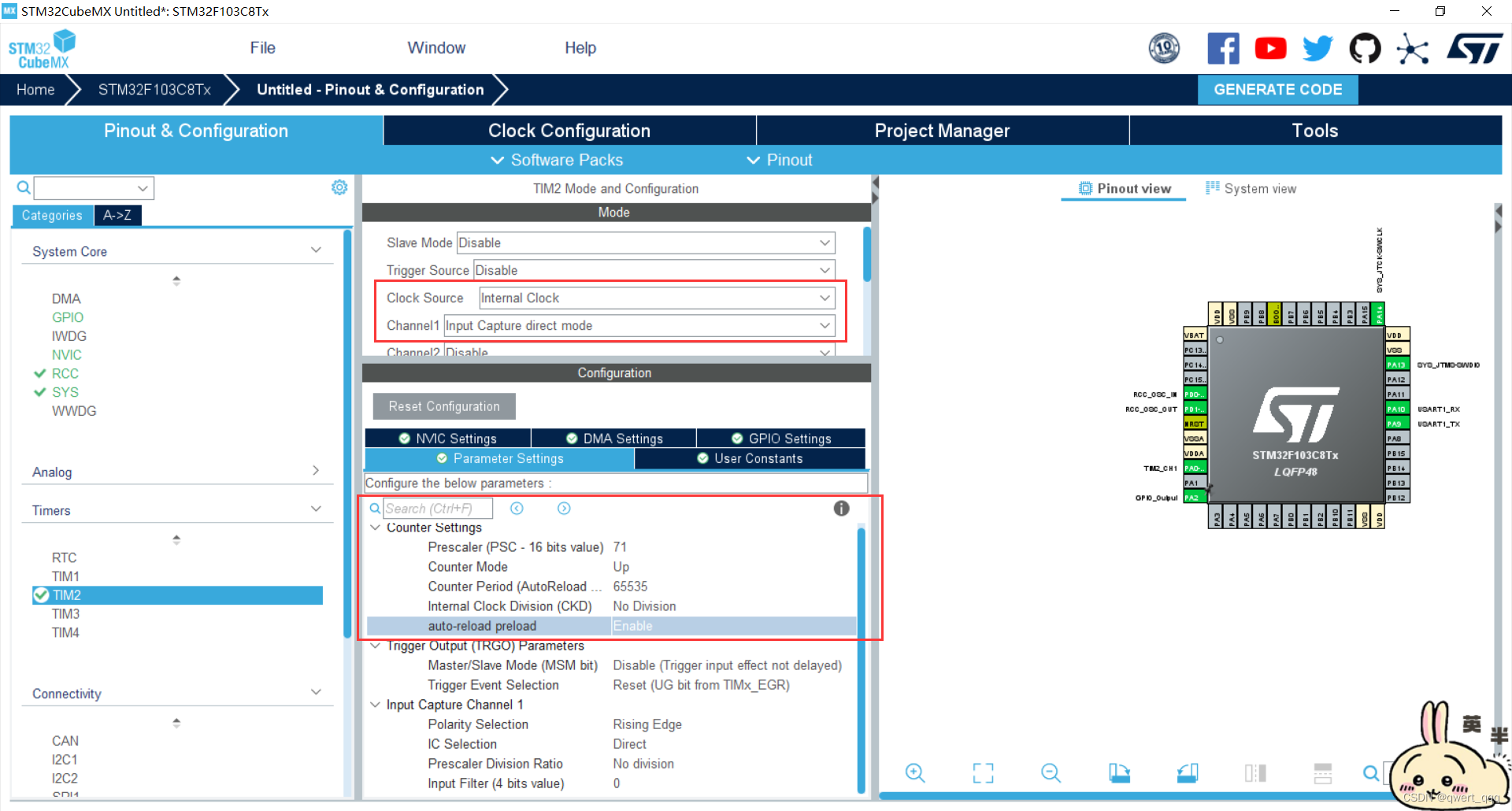
到这就可以生成工程了。
SR04.h
#ifndef __SR04_H
#define __SR04_H
#include "main.h"
#include "tim.h"
#include "stdio.h"
#define TRIG_H HAL_GPIO_WritePin(GPIOA,GPIO_PIN_2,GPIO_PIN_SET)
#define TRIG_L HAL_GPIO_WritePin(GPIOA,GPIO_PIN_2,GPIO_PIN_RESET)
void delay_us(uint32_t us);
void SR04_GetData(void);
#endif
SR04.c
#include "SR04.h"
float distant; //测量距离
uint32_t measure_Buf[3] = {
0}; //存放定时器计数值的数组
uint8_t measure_Cnt = 0; //状态标志位
uint32_t high_time; //超声波模块返回的高电平时间
//===============================================读取距离
void SR04_GetData(void)
{
switch (measure_Cnt){
case 0:
TRIG_H;
delay_us(30);
TRIG_L;
measure_Cnt++;
__HAL_TIM_SET_CAPTUREPOLARITY(&htim2, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING);
HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_1); //启动输入捕获 或者: __HAL_TIM_ENABLE(&htim5);
break;
case 3:
high_time = measure_Buf[1]- measure_Buf[0]; //高电平时间
printf("\r\n----高电平时间 %d-us----\r\n",high_time);
distant=(high_time*0.034)/2; //单位cm
printf("\r\n-检测距离为 %.2f-cm-\r\n",distant);
measure_Cnt = 0; //清空标志位
TIM2->CNT=0; //清空计时器计数
break;
}
}
//===============================================us延时函数
void delay_us(uint32_t us)//主频72M
{
uint32_t delay = (HAL_RCC_GetHCLKFreq() / 4000000 * us);
while (delay--)
{
;
}
}
//===============================================中断回调函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)//
{
if(TIM2 == htim->Instance)// 判断触发的中断的定时器为TIM2
{
switch(measure_Cnt){
case 1:
measure_Buf[0] = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1);//获取当前的捕获值.
__HAL_TIM_SET_CAPTUREPOLARITY(&htim2,TIM_CHANNEL_1,TIM_ICPOLARITY_FALLING); //设置为下降沿捕获
measure_Cnt++;
break;
case 2:
measure_Buf[1] = HAL_TIM_ReadCapturedValue( 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1739
1739

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









