







作者|震霆
出品|遇见人工智能 公众号|GOwithAI
救援机器人也是时候来了解一下了。
只因它的功力如同波士顿动力一样,已经让人一惊。
比如,先接一招:
在我们印象中,它可能是一个其貌不扬的机械物种,只因为足够的实用,成为机器人界的绝对劳模。
也正如扫地机器人一样,用户对它的预期最低,但工作成果绝对超出预期,从而进阶为别人家的智能产品。
网上随意一搜,各种姿态的救援机器人跃然纸上。
从外观看上去已经足够接地气。排雷、救援、探险诸如此类高难度系数动作都不在话下。
而意大利理工学院的研究人员又将这种对机器人的想象再次升级,搞出了半人马座(Centauro)救援机器人:六条腿,四个轮子,两只机械臂....他们还无不自豪的说这就是未来。
有多大本领?看下面动图。

半人马座(Centauro)是科学家们最新的一项实验,试图找到最具适应性和最有用的形态,用以帮助灾难救援。
通常,这些机器和人类一样,有两只手臂和两条腿,但是研究人员越来越多地发现混合设计可以提供了更多的灵活性。

半人马座的四轮腿比仿人机器人更稳定,但仍然保留着操纵工具和门等物体所需的两只前向手臂。
正如IEEE频谱所报道的,Centauro的设计是建立在MOMARO的基础上的,MOMARO是由波恩大学的研究人员设计的另一个半人马机器人。
MOMARO是2015年DARPA机器人挑战赛中欧洲表现最好的选手,该挑战赛测试了机器人在搜索和救援任务中执行任务的能力(很多机器人都倒下了)。
其他在比赛中表现最好的是混合动力车,包括来自韩国KAIST大学的获胜团队,他们制造了一款从两足设计转变为轮式设计的机器人。
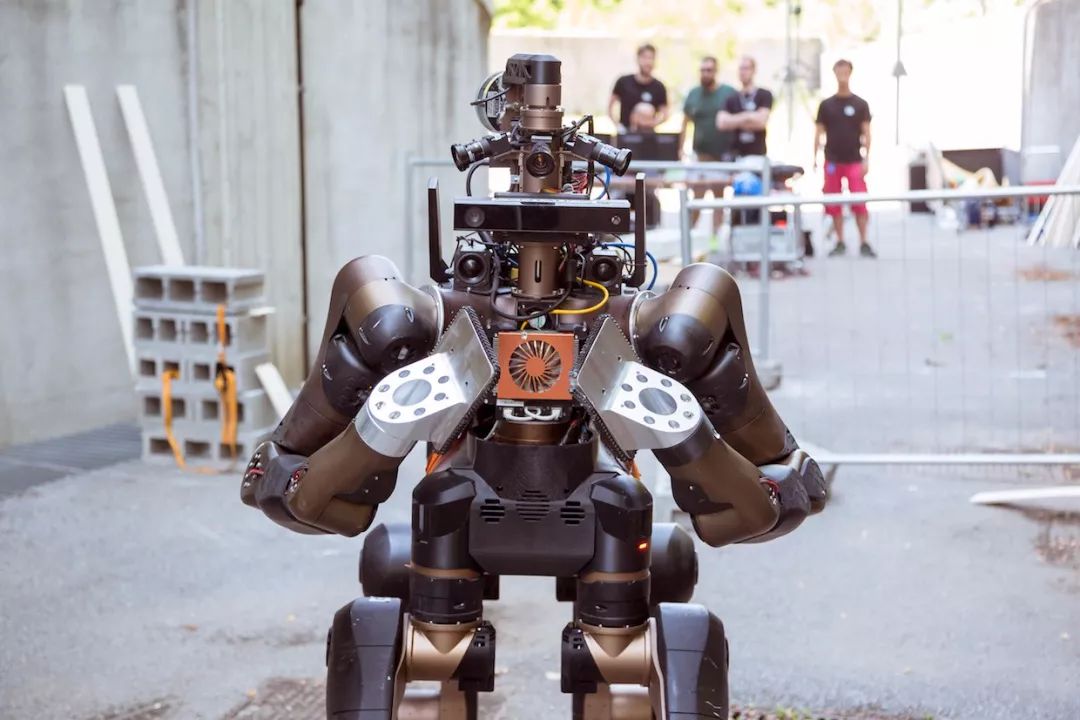
半人马座本身是1.5米高,重93公斤,由各种轻量级金属制成(如铝,覆盖着3D打印的塑料“皮”)。它的电池寿命为2.5小时,并随时由人工操作人员控制.。
不过,这种设计的主要卖点是灵活性:机器人的每个肢体都有六个自由度,可以在臀部、膝盖和脚踝处旋转。
这意味着它可以采取许多不同的姿势,包括一个直立轮式(最好的快速移动)和一个蜷缩的“蜘蛛”模式,这使它在操作工具时更加稳定。它还可以在瓦砾中穿行,甚至爬上楼梯。

当然,设计机器人本身有挑战,当下,研究人员必须找出控制它的最佳方法,并将在越来越困难的挑战中测试半人马座的威力。
谁知道呢,将来我们可能会看到设计半人马的机器人将人类从危险的环境中拯救出来。
这当然已经不是幻想,而是变成现实的一种必然。
----End----
加·真社群|国内顶级人工智能公司已集结,每天分享激动人心的AI大事、新应用。如想进入,加微信:623974966,备注:遇见人工智能+单位和职位,符合条件,择优邀请。
领·好福利|点标题下蓝字,或微信搜“遇见人工智能”,关注后回复"报告",1秒钟获取麦肯锡、德 勤等198份顶级最新AI报告。
独家精选栏目文章合集(点击图片即可进入▼)




兼具内容品质和设计颜值的AI全媒体
「AI名利场」 「这很AI」 「AI新声」
商务合作、转载、投稿请联系微信
▼
Lxz216216216



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









