



注:作者为初学者,有些知识不太熟悉,可能描述有误,望见谅。
上采样
概念
上采样(Upsampling)是深度学习中用于增加特征图空间分辨率的操作,常用于图像分割、超分辨率、生成对抗网络(GAN)等任务。其核心目的是将低分辨率特征图恢复到高分辨率,同时保留或恢复有效信息。
方法(常用 双线性插值、转置卷积)
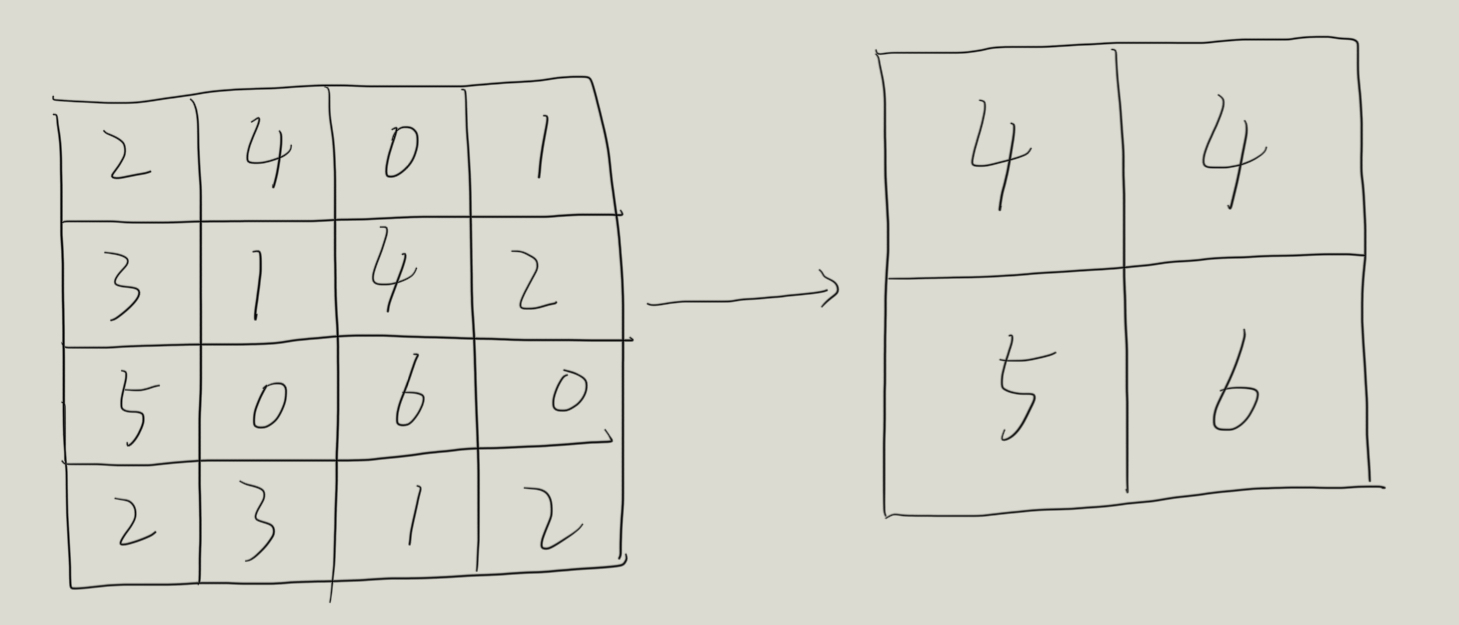
最近邻插值(Nearest Neighbor Interpolation)
最近邻插值通过复制最近的像素值实现上采样,计算简单但可能产生锯齿效应。
适用场景:计算资源有限或对精度要求不高的实时应用(如简单的图像放大)。
PyTorch实现:
nn.Upsample(scale_factor=2, mode='nearest')中,scale_factor=2是把输入张量的空间尺寸(高和宽)同时放大 2 倍。若输入是 H×W,输出就是 (2H)×(2W);mode='nearest'是采用最近邻插值算法,输出特征图上每个像素直接复制输入图中“离得最近”的那个像素的值。
import torch.nn as nn
# 定义最近邻上采样层
upsample = nn.Upsample(scale_factor=2, mode='nearest')
# 输入(1张1通道的2x2图像)
input_tensor = torch.rand(1, 1, 2, 2)
output = upsample(input_tensor)
print(output.shape) # 输出形状:[1, 1, 4, 4]
双线性插值(Bilinear Interpolation)
双线性插值通过对周围4个像素的加权平均计算新像素值,计算简单且无需额外参数,适合对计算资源敏感的场景。但其插值权重固定,无法根据任务需求优化,可能导致细节恢复不足。通常作为轻量级替代方案或与其他方法结合使用。
语义分割、目标检测、超分辨率等“解码器”部分,80% 以上都会先拿它做“粗放大”,再视情况接别的模块。适用场景为需要平滑过渡的自然图像上采样(如医学影像、普通照片)。
参数align_corners=True:决定“坐标网格”如何对齐。
True:输入最左上角像素中心与输出最左上角像素中心严格重合,边缘像素也严格对齐。
False:像素被视为“小方块”,网格从 -1+1/W 到 1-1/W,边缘外扩 0.5 像素。
PyTorch实现:
upsample = nn.Upsample(scale_factor=2, mode='bilinear', align_corners=True)
# 示例输入
input_tensor = torch.rand(1, 3, 16, 16)
output = upsample(input_tensor)
print(output.shape) # 输出形状:[1, 3, 32, 32]
转置卷积(Transposed Convolution) (U-NET使用)
转置卷积通过可学习的核进行上采样,能适应数据分布但可能引发棋盘效应。
适用场景:需要端到端学习的任务(如语义分割、图像生成)。
转置卷积在深度学习中有时也称作反卷积,实现上并不“逆运算”,只是用转置后的卷积核权重做稀疏卷积。
步骤
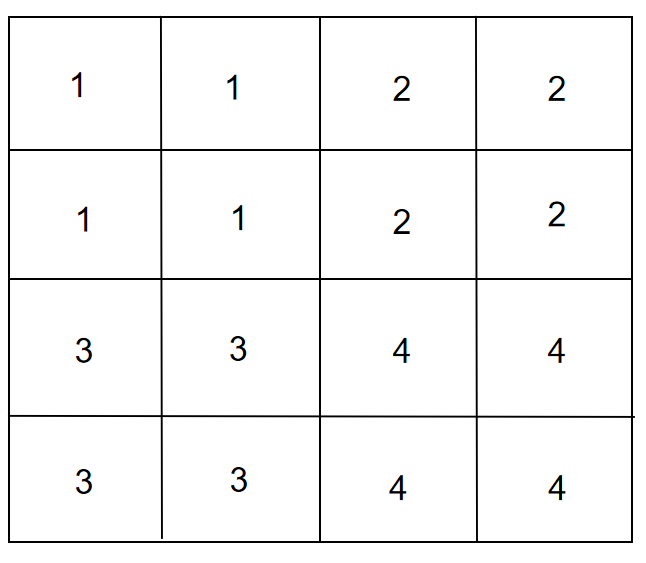
(1)先把输入每个像素周围补零(stride−1 行/列零):4×4 变成 7×7(因为 stride=2,相邻像素间插 1 行 1 列零)。如下图:
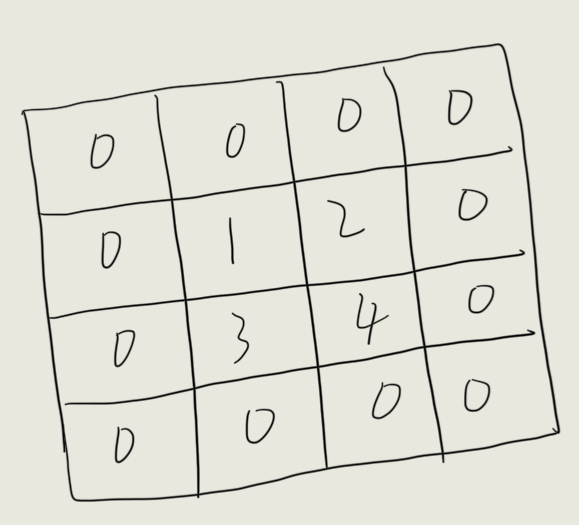
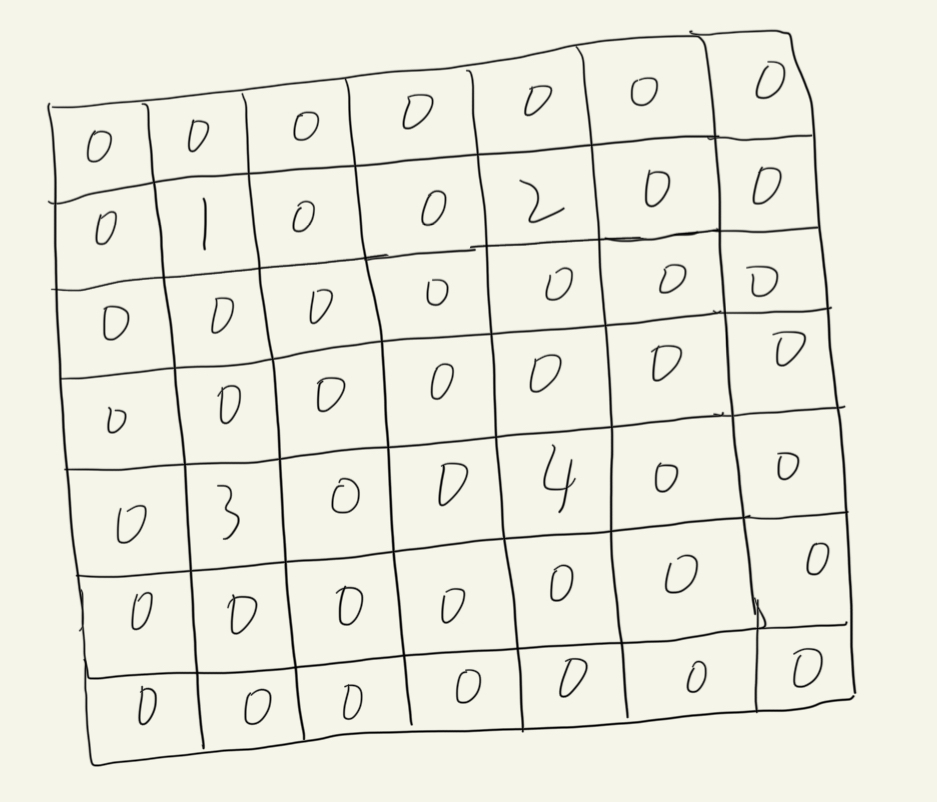
(2)再在四周再补 padding 圈零(这里 padding=1):7×7 → 9×9。(图略)
(3)用 3×3 核做普通卷积(步长=1):9×9 经 3×3 卷积 ⇒ 7×7,但 PyTorch 又在最右/最下再补 output_padding=1,最终得到 8×8。
输出尺寸计算方法
公式:out = (in −1)×stride − 2×padding + kernel + output_padding
如:kernel=3,stride=2,padding=1,output_padding=1
输入 4×4 ⇒ (4−1)×2 −2×1 +3 +1 = 6−2+3+1 = 8
所以 4×4 → 8×8(通道数不变,仍为 1)
PyTorch实现:
import torch
import torch.nn as nn
# 定义转置卷积层
trans_conv = nn.ConvTranspose2d(
in_channels=1,
out_channels=1,
kernel_size=3,
stride=2,
padding=1,
output_padding=1,
bias=False
)
# 生成4x4的输入张量(模拟单通道图像)
input_tensor = torch.arange(16, dtype=torch.float32).reshape(1, 1, 4, 4)
print("输入尺寸:", input_tensor.shape)
# 执行转置卷积
output = trans_conv(input_tensor)
print("输出尺寸:", output.shape)
# 验证维度计算公式
calculated_size = (input_tensor.shape[2] - 1) * 2 - 2 * 1 + 3 + 1
print("计算尺寸应等于:", calculated_size)
像素洗牌(Pixel Shuffle)
像素洗牌将通道维度信息重组到空间维度,常用于超分辨率任务,效率高于转置卷积。
适用场景:高质量图像超分辨率(如ESPCN、Real-ESRGAN)。
PyTorch实现:
# 先通过卷积增加通道数,再应用PixelShuffle
conv = nn.Conv2d(64, 256, kernel_size=3, padding=1)
pixel_shuffle = nn.PixelShuffle(upscale_factor=2)
# 示例输入
input_tensor = torch.rand(1, 64, 16, 16)
x = conv(input_tensor)
output = pixel_shuffle(x)
print(output.shape) # 输出形状:[1, 64, 32, 32]
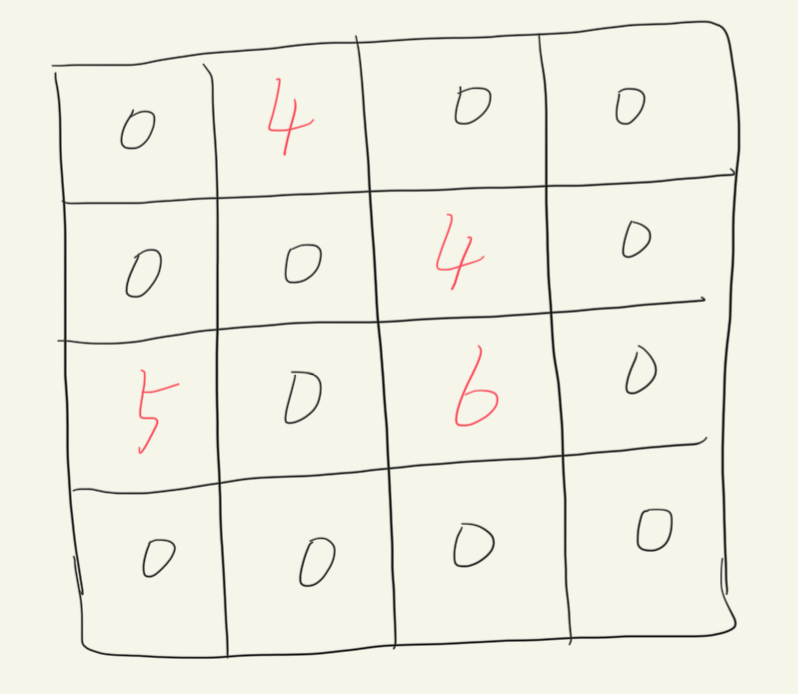
反池化(Unpooling)
反池化编码器用 MaxPool 下采样时把“最大值的 spatial index”记下来,解码器把值 原路放回去,其余填零,从而:
-
保持边缘稀疏、定位精确;
-
无参数、无学习;
-
但只恢复“最大值”信息,非最大位置永远为零。
反池化后:
PyTorch实现:
nn.MaxPool2d(2, return_indices=True)中:
2等价于 kernel_size=2,表示池化窗口大小 2×2;
return_indices=True:前向传播时不仅返回池化结果,还会把“每个最大值在滑动窗口里的平面索引”一并返回。这些索引后续要交给 MaxUnpool2d 做反池化,告诉它“原来最大值在哪个位置”。
pool = nn.MaxPool2d(2, return_indices=True)
unpool = nn.MaxUnpool2d(2)
# 示例输入
input_tensor = torch.rand(1, 1, 4, 4)
x, indices = pool(input_tensor)
output = unpool(x, indices)
print(output.shape) # 输出形状:[1, 1, 4, 4]
下采样
下采样的概念
下采样(Downsampling)是减少数据空间分辨率或时间分辨率的过程,通过降低特征图尺寸或减少数据量来压缩信息。在深度学习中,下采样常用于减少计算量、扩大感受野或提取高层特征。
方法
方法选择建议
(1)注重位置信息:优先使用步长卷积或空洞卷积。
(2)需要抗噪声:选择最大池化或平均池化。
(3)多尺度任务:考虑SPP或类似结构。
最大池化(Max Pooling):
在局部窗口内取最大值作为输出。
优点:保留显著特征,抑制噪声,计算高效。
缺点:丢失位置细节信息,可能产生过拟合。
PyTorch示例:
import torch.nn as nn
max_pool = nn.MaxPool2d(kernel_size=2, stride=2)
input_tensor = torch.randn(1, 3, 64, 64) # (batch, channel, height, width)
output = max_pool(input_tensor)
print(output.shape) # torch.Size([1, 3, 32, 32])
平均池化(Average Pooling):
在局部窗口内计算平均值作为输出。
优点:平滑特征,减少噪声影响。
缺点:模糊重要特征,边缘信息可能丢失。
PyTorch示例:
avg_pool = nn.AvgPool2d(kernel_size=2, stride=2)
output = avg_pool(input_tensor)
print(output.shape) # torch.Size([1, 3, 32, 32])
步长卷积(Strided Convolution):
通过设置卷积步长(stride > 1)直接缩小特征图尺寸。
优点:可学习参数保留更多信息,灵活性高。
缺点:可能引入棋盘伪影(checkerboard artifacts)。
PyTorch示例:
conv = nn.Conv2d(3, 64, kernel_size=3, stride=2, padding=1)
output = conv(input_tensor)
print(output.shape) # torch.Size([1, 64, 32, 32])
空洞卷积(Dilated Convolution):
通过增大卷积核间隔(dilation rate)间接扩大感受野。
优点:保持特征图尺寸时扩大感受野。
缺点:小物体信息可能丢失,计算成本较高。
参数dilation=2: 空洞率=2,把 3×3 核的 9 个采样点间隔拉开,实际覆盖 5×5 的物理区域。
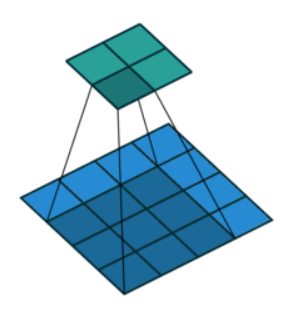
普通卷积:
空洞卷积:
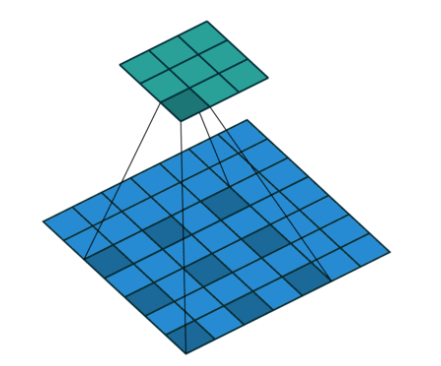
二者的卷积核大小都是一样的(滑窗的实际大小是一样的),但空洞卷积的滑窗(kernel)元素之间是存在一些间隙的,这些间隙在空洞卷积中成为膨胀因子。
PyTorch示例:
dilated_conv = nn.Conv2d(3, 64, kernel_size=3, stride=1, padding=2, dilation=2)
output = dilated_conv(input_tensor)
print(output.shape) # torch.Size([1, 64, 64, 64])
空间金字塔池化(SPP):
多尺度池化后拼接特征,适应不同输入尺寸。
优点:处理可变输入尺寸,增强多尺度特征提取。
缺点:内存占用高,实现复杂。
PyTorch示例:
class SPP(nn.Module):
def __init__(self):
super().__init__()
self.pools = nn.ModuleList([
nn.MaxPool2d(4, 4),
nn.MaxPool2d(8, 8),
nn.MaxPool2d(16, 16)
])
def forward(self, x):
features = [x]
for pool in self.pools:
features.append(pool(x))
return torch.cat(features, dim=1)
spp = SPP()
output = spp(input_tensor)
print(output.shape) # 依赖输入尺寸



















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









