







简介
稠密连接网络(DenseNet)是由康奈尔大学的 Gao Huang 等人在 2017 年提出的深度卷积神经网络架构。它在 ResNet 的残差连接思想基础上进一步创新,通过密集跨层连接(Dense Connectivity)显著提升了特征复用效率,减少了参数量 。
enseNet 的核心思想
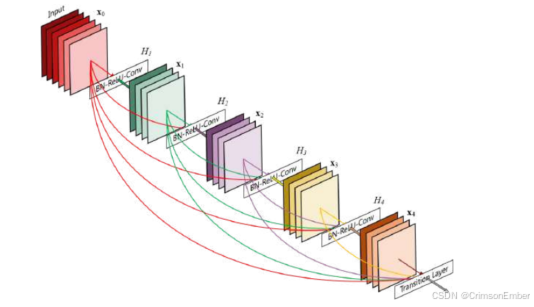
每一层的输入不仅来自前一层的输出,还来自前面所有层的输出。
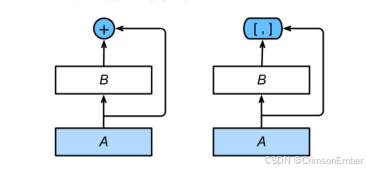
与ResNet的主要区别在于,DenseNet里模块的输出不是像ResNet那样和模块的输出相加,而是在通道维上连结。这样模块的输出可以直接传入模块后面的层。在这个设计里,模块直接跟模块后面的所有层连接在了一起。这也是它被称为“稠密连接”的原因。
DenseNet的主要构建模块是稠密块(dense block)和过渡层(transition layer)。前者定义了输 入和输出是如何连结的,后者则用来控制通道数,使之不过大。
DenseNet 的关键组件
稠密块
-
由多个密集连接的层组成,层间通过拼接(而非相加)传递特征。
-
每层的输出通道数固定(如
growth_rate=32),但整体通道数线性增长。
Transition Layer
-
用于连接不同 Dense Block,降低特征图尺寸并压缩通道数:
-
1x1 卷积:减少通道数(通常压缩为一半)。
-
2x2 平均池化:下采样。
-
代码:
import torch
from torch import nn
from torch.utils.data import DataLoader
import torchvision
import torchvision.transforms as transforms
import time
import sys
from torch import nn, optim
import torch.nn.functional as F
# 定义全局平均池化层
class GlobalAvgPool2d(nn.Module):
# 全局平均池化层可通过将池化窗口形状设置成输入的高和宽实现
def __init__(self):
super(GlobalAvgPool2d, self).__init__()
def forward(self, x):
return F.avg_pool2d(x, kernel_size=x.size()[2:])
# 定义卷积块
def conv_block(in_channels, out_channels):
blk = nn.Sequential(
nn.BatchNorm2d(in_channels),
nn.ReLU(),
nn.Conv2d(in_channels, out_channels,
kernel_size=3, padding=1)
)
return blk
# 定义DenseBlock
class DenseBlock(nn.Module):
def __init__(self, num_convs, in_channels, out_channels):
super(DenseBlock, self).__init__()
net = []
for i in range(num_convs):
in_c = in_channels + i*out_channels
net.append(conv_block(in_c, out_channels))
self.net = nn.ModuleList(net)
# 计算输出通道数
self.out_channels = in_channels + num_convs*out_channels
def forward(self, X):
for blk in self.net:
Y = blk(X)
# 在通道维上将输入和输出连结
X = torch.cat((X, Y), dim=1)
return X
# blk = DenseBlock(2, 3, 10)
# X = torch.rand(4, 3, 8, 8)
# Y = blk(X)
# print(Y.shape)
# 定义过渡块
def transition_block(in_channels, out_channels):
blk = nn.Sequential(
nn.BatchNorm2d(in_channels),
nn.ReLU(),
nn.Conv2d(in_channels, out_channels, kernel_size=1),
nn.AvgPool2d(kernel_size=2, stride=2)
)
return blk
# blk1 = transition_block(23, 10)
# print(blk1(Y).shape)
net = nn.Sequential(
nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
)
num_channels, growth_rate = 64, 32
num_convs_in_dense_blocks = [4, 4, 4, 4]
for i, num_convs in enumerate(num_convs_in_dense_blocks):
DB = DenseBlock(num_convs, num_channels, growth_rate)
net.add_module('DenseBlock_%d' % i, DB)
# 上一个稠密块的输出通道数
num_channels = DB.out_channels
# 在稠密块之间加入通道数减半的过渡层
if i != len(num_convs_in_dense_blocks)-1:
net.add_module('transition_block_%d' % i, transition_block(num_channels, num_channels//2))
num_channels = num_channels // 2
net.add_module('BN', nn.BatchNorm2d(num_channels))
net.add_module('relu', nn.ReLU())
# GlobalAvgPool2d的输出: (Batch, num_channels, 1, 1)
net.add_module('global_avg_pool', GlobalAvgPool2d())
net.add_module('fc', nn.Sequential(nn.Flatten(),
nn.Linear(num_channels, 10)))
# X = torch.rand((1, 1, 96, 96))
# for name, layer in net.named_children():
# X = layer(X)
# print(name, ' output shape:\t', X.shape)
def load_data_fashion_mnist(batch_size, resize=None):
"""
function:
将fashion mnist数据集划分为小批量样本
Parameters:
batch_size - 小批量样本的大小(int)
resize - 对图像的维度进行扩大
Returns:
train_iter - 训练集样本划分为最小批的结果
test_iter - 测试集样本划分为最小批的结果
Modify:
2020-11-26
2020-12-10 添加图像维度变化
"""
# 存储图像处理流程
trans = []
if resize:
trans.append(transforms.Resize(size=resize))
trans.append(transforms.ToTensor())
transform = transforms.Compose(trans)
mnist_train = torchvision.datasets.FashionMNIST(
root='data/FashionMNIST',
train=True,
download=True,
transform=transform)
mnist_test = torchvision.datasets.FashionMNIST(root='data/FashionMNIST',
train=False,
download=True,
transform=transform)
if sys.platform.startswith('win'):
# 0表示不用额外的进程来加速读取数据
num_workers = 0
else:
num_workers = 4
train_iter = torch.utils.data.DataLoader(mnist_train,
batch_size=batch_size,
shuffle=True,
num_workers=num_workers)
test_iter = torch.utils.data.DataLoader(mnist_test,
batch_size=batch_size,
shuffle=False,
num_workers=num_workers)
return train_iter, test_iter
def evaluate_accuracy(data_iter, net, device=None):
"""
function:
计算多分类模型预测结果的准确率
Parameters:
data_iter - 样本划分为最小批的结果
net - 定义的网络
device - 指定计算在GPU或者CPU上进行
Returns:
准确率计算结果
Modify:
2020-11-30
2020-12-03 增加模型训练模型和推理模式的判别
2020-12-10 增加指定运行计算位置的方法
"""
if device is None and isinstance(net, torch.nn.Module):
# 如果没指定device就使用net的device
device = next(net.parameters()).device
acc_sum, n = 0.0, 0
with torch.no_grad():
for X, y in data_iter:
if isinstance(net, torch.nn.Module):
# 评估模式, 这会关闭dropout
net.eval()
# .cpu()保证可以进行数值加减
acc_sum += (net(X.to(device)).argmax(dim=1) ==y.to(device)).float().sum().cpu().item()
# 改回训练模式
net.train()
# 自定义的模型, 2.13节之后不会用到, 不考虑GPU
else:
if ('is_training' in net.__code__.co_varnames):
# 将is_training设置成False
acc_sum += (net(X, is_training=False).argmax(dim=1) ==y).float().sum().item()
else:
acc_sum += (net(X).argmax(dim=1) == y).float().sum().item()
n += y.shape[0]
return acc_sum / n
def train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs):
"""
function:
利用softmax回归模型对图像进行分类识别
Parameters:
net - 定义的网络
train_iter - 训练集样本划分为最小批的结果
test_iter - 测试集样本划分为最小批的结果
num_epochs - 迭代次数
batch_size - 最小批大小
optimizer - 优化器
device - 指定计算在GPU或者CPU上进行
Returns:
Modify:
2020-12-10
"""
# 将模型加载到指定运算器中
net = net.to(device)
print("training on ", device)
loss = torch.nn.CrossEntropyLoss()
for epoch in range(num_epochs):
train_l_sum, train_acc_sum, n, batch_count = 0.0, 0.0, 0, 0
start = time.time()
for X, y in train_iter:
X = X.to(device)
y = y.to(device)
y_hat = net(X)
l = loss(y_hat, y)
# 梯度清零
optimizer.zero_grad()
l.backward()
optimizer.step()
train_l_sum += l.cpu().item()
train_acc_sum += (y_hat.argmax(dim=1) == y).sum().cpu().item()
n += y.shape[0]
batch_count += 1
test_acc = evaluate_accuracy(test_iter, net, device=device)
print('epoch %d, loss %.4f, train acc %.3f, test acc %.3f, \
time %.1f sec' % (epoch+1, train_l_sum/batch_count,
train_acc_sum/n, test_acc,
time.time()-start))
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
batch_size = 256
train_iter, test_iter = load_data_fashion_mnist(batch_size,
resize=96)
lr, num_epochs = 0.001, 2
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
train_ch5(net, train_iter, test_iter, batch_size, optimizer,
device, num_epochs)
torch.save(net.state_dict(), 'DensoNet.params')

















 2366
2366

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









