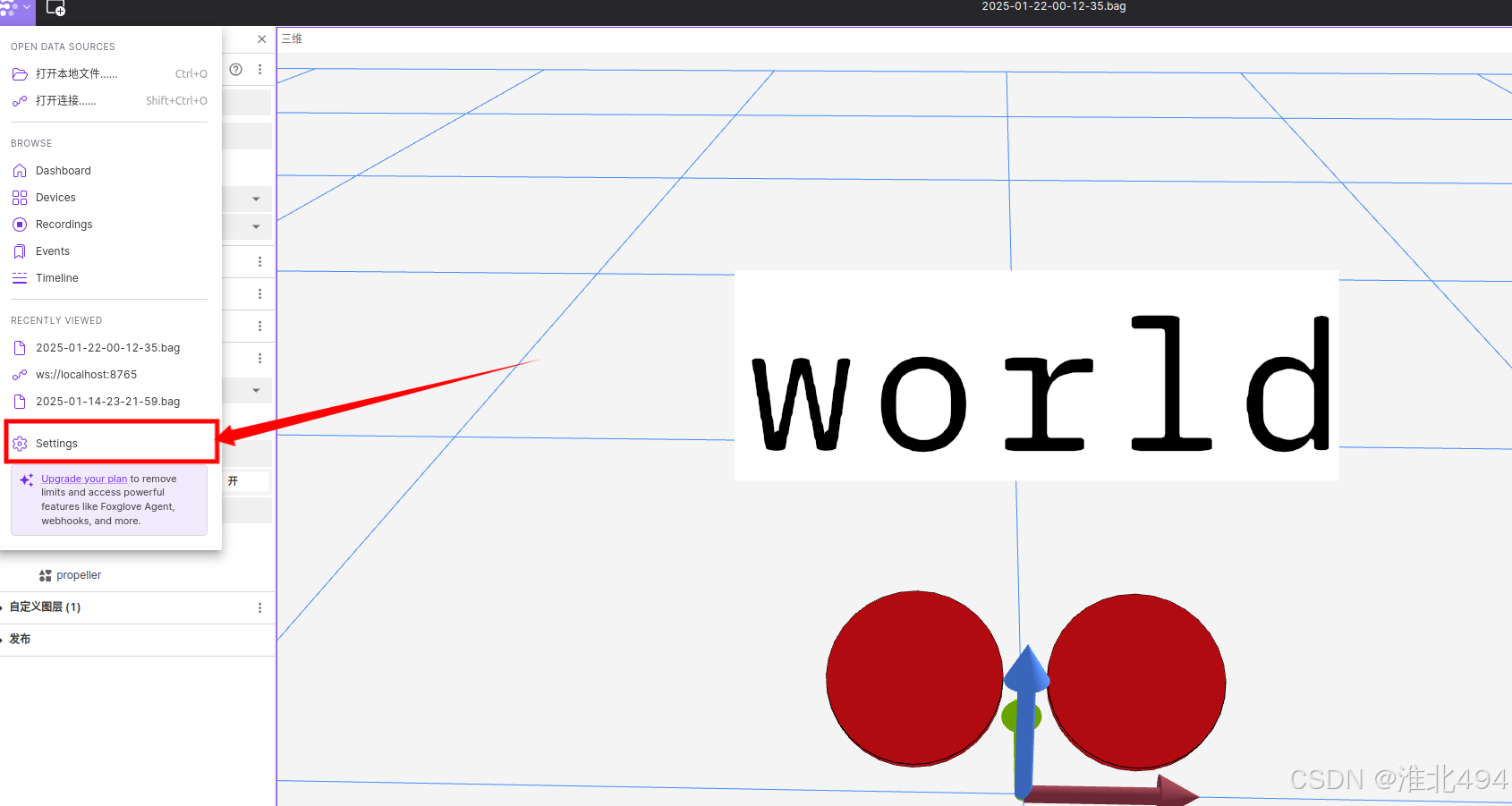
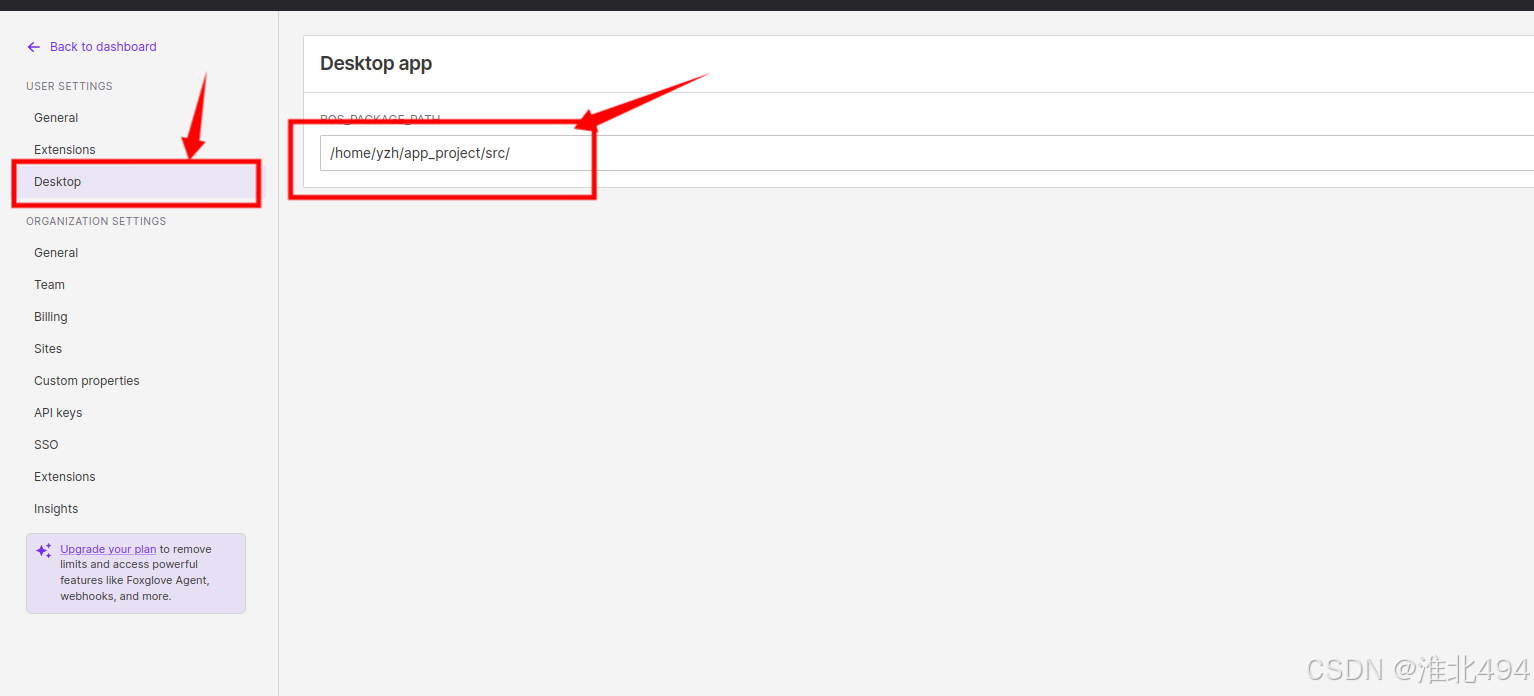
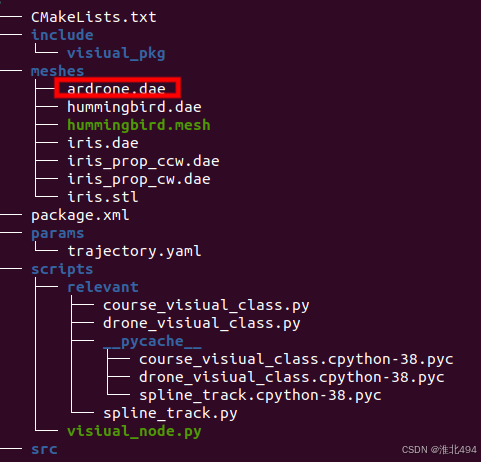
目录 前言: 解决方案: 前言: 我现在有一个无人机的模型,我使用marker发布一个话题将这个无人机可视化在foxglove studio这个软件里面,当我实时连接的时候没有问题,但是当回放录制的这个话题的时候,包上面的这个错误,解决办法是如要设置foxglove的ROS_PACKAGE_PATH,具体设置如下 解决方案: 注意:这个路径下都是一些功能包,其中存放.dae文件的功能包的文件树如下。





 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言