







解决尺度不变,拉普拉斯
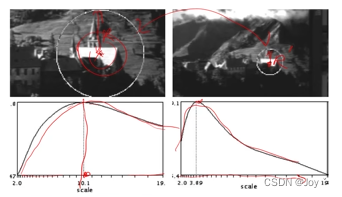
问题:解决尺度不变(scale covariance)问题(角点存在这个问题)
角点见(3)
解决:找对应函数
纵轴:圆圈准确度,横轴圆半径,顶点看出最准确时候的半径
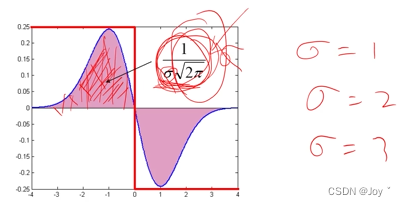
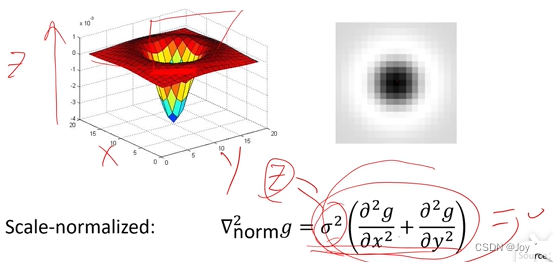
拉普拉斯找二阶导,但是随着σ增大,信号衰减没了
可以补充,防止衰减影响
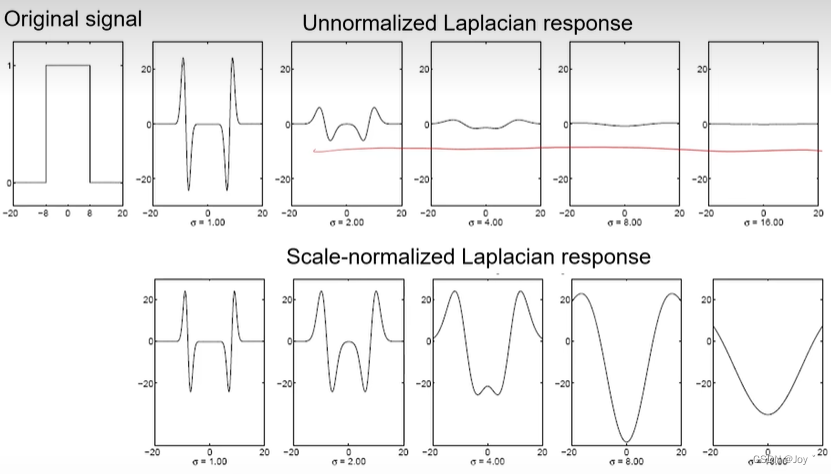
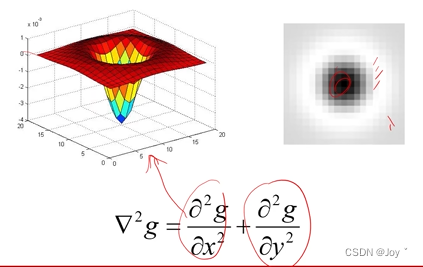
二阶拉普拉斯模板
现在推导圆半径与窗宽有何关系
只有左边这个正好的合适
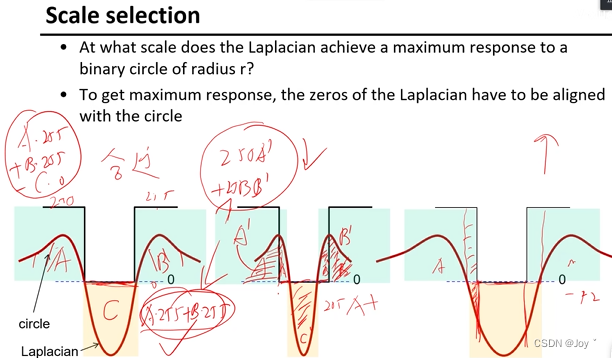
拉普拉斯,一阶高斯偏导卷积最大,高斯二阶偏导=0,需要:
则
关系求出!
也就是找到这个0平面,为我要的圈(框住了特征)
然后检查图的响应结果,对每个点判断,算出对应r,然后3个里面比较做决策,在26个点里进行非最大化抑制
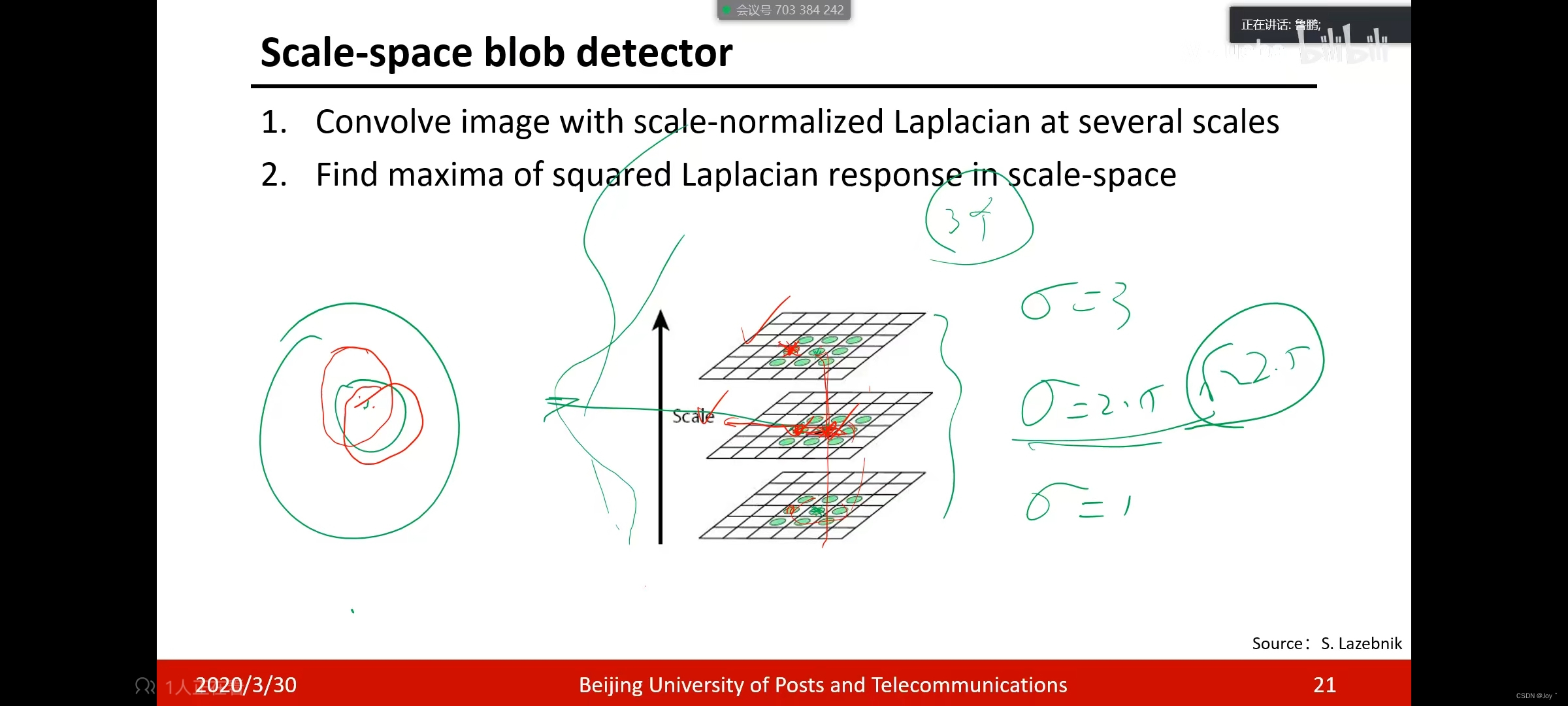
缺陷
对每个点判断,而且还要高斯模板,检验各种尺度,运算太慢
优势
精确找圆
改进1 将角点与尺度结合
只判断角点周围的,减少更多运算
改进2 SIFT 尺度不变特征
特征提取圈住
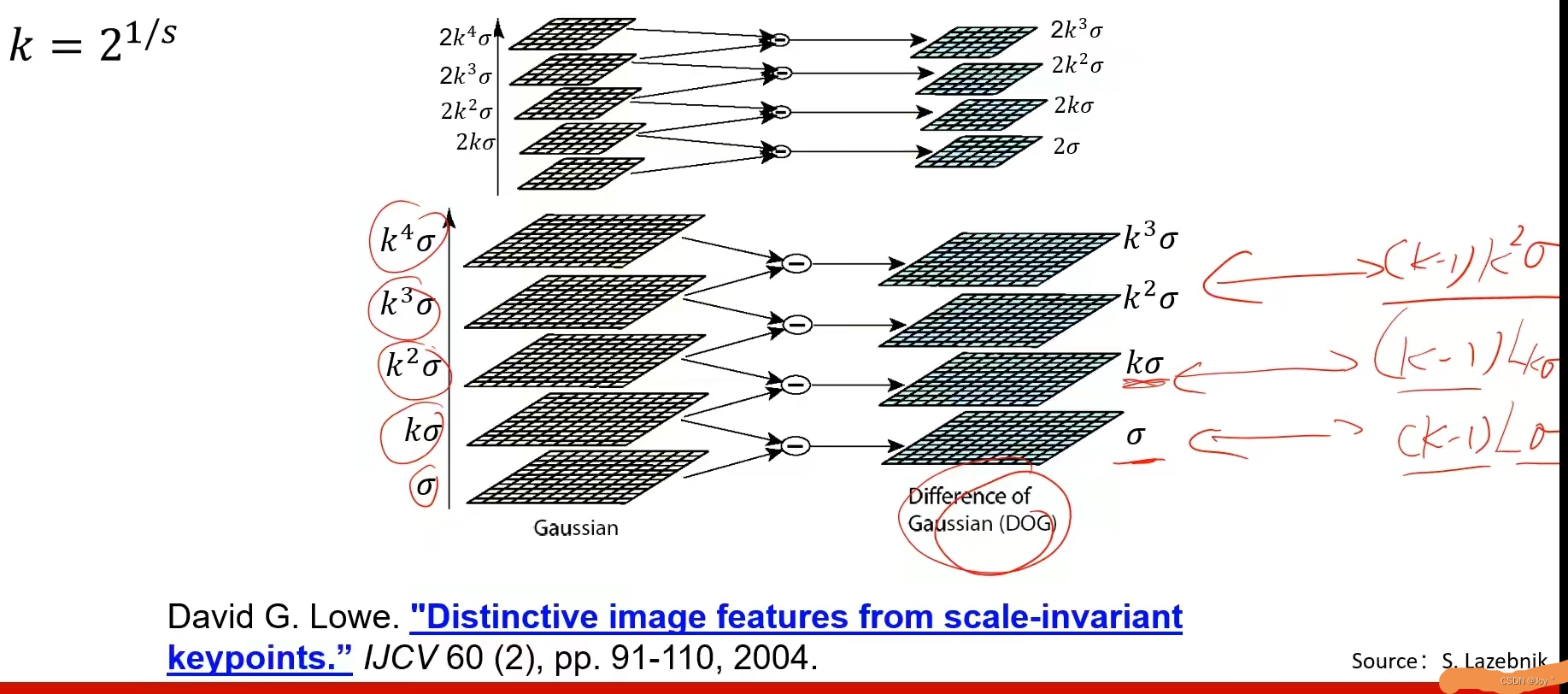
DoG效果近似拉普拉斯
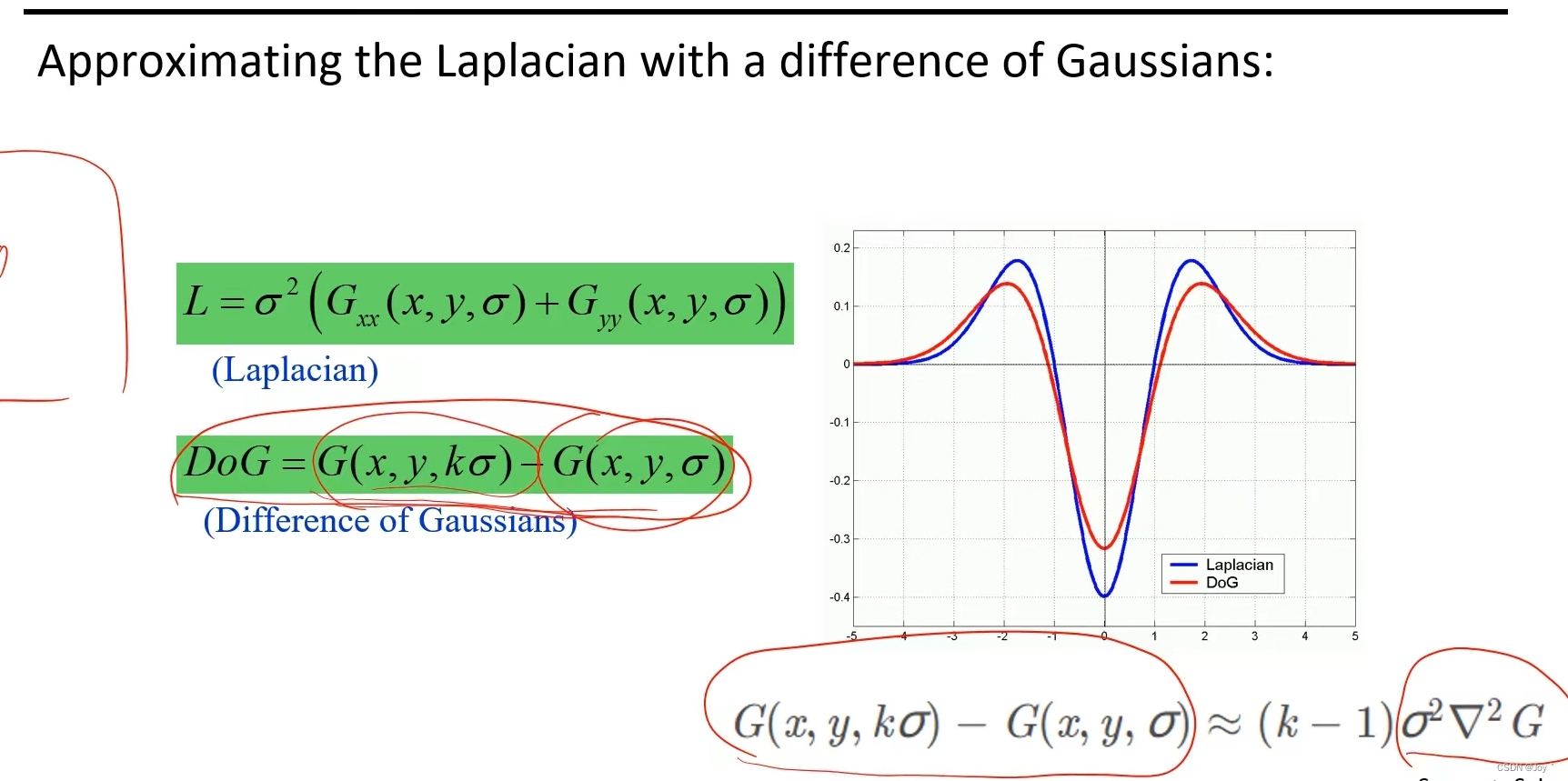
用小西格玛减去大,大的更模糊,提取关键信息
差异是k-1
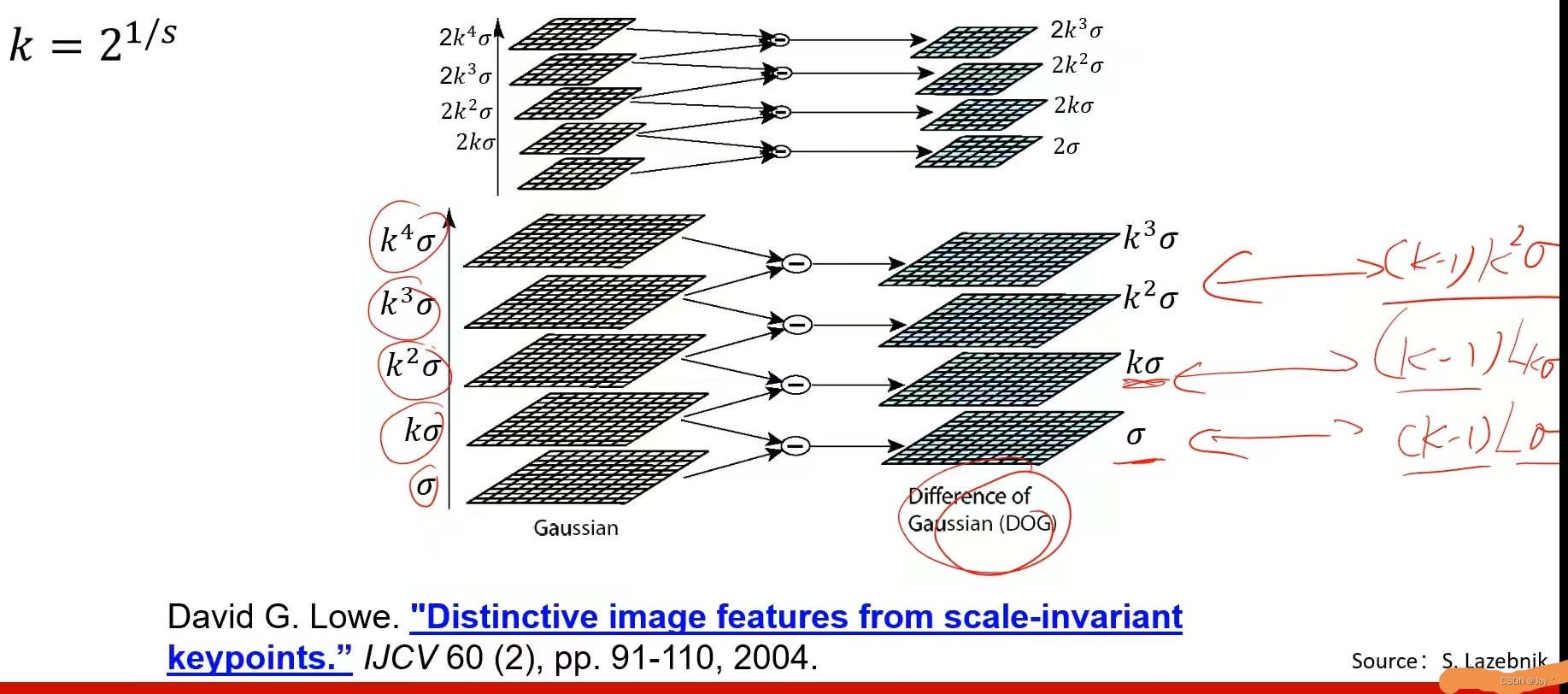
可以在基础上一层层做,效率更高
优势
用上一次的结果得到大核
把图缩小,窗口不变,检测
检查n倍尺度,把图缩小n倍,同样模板卷积就行了
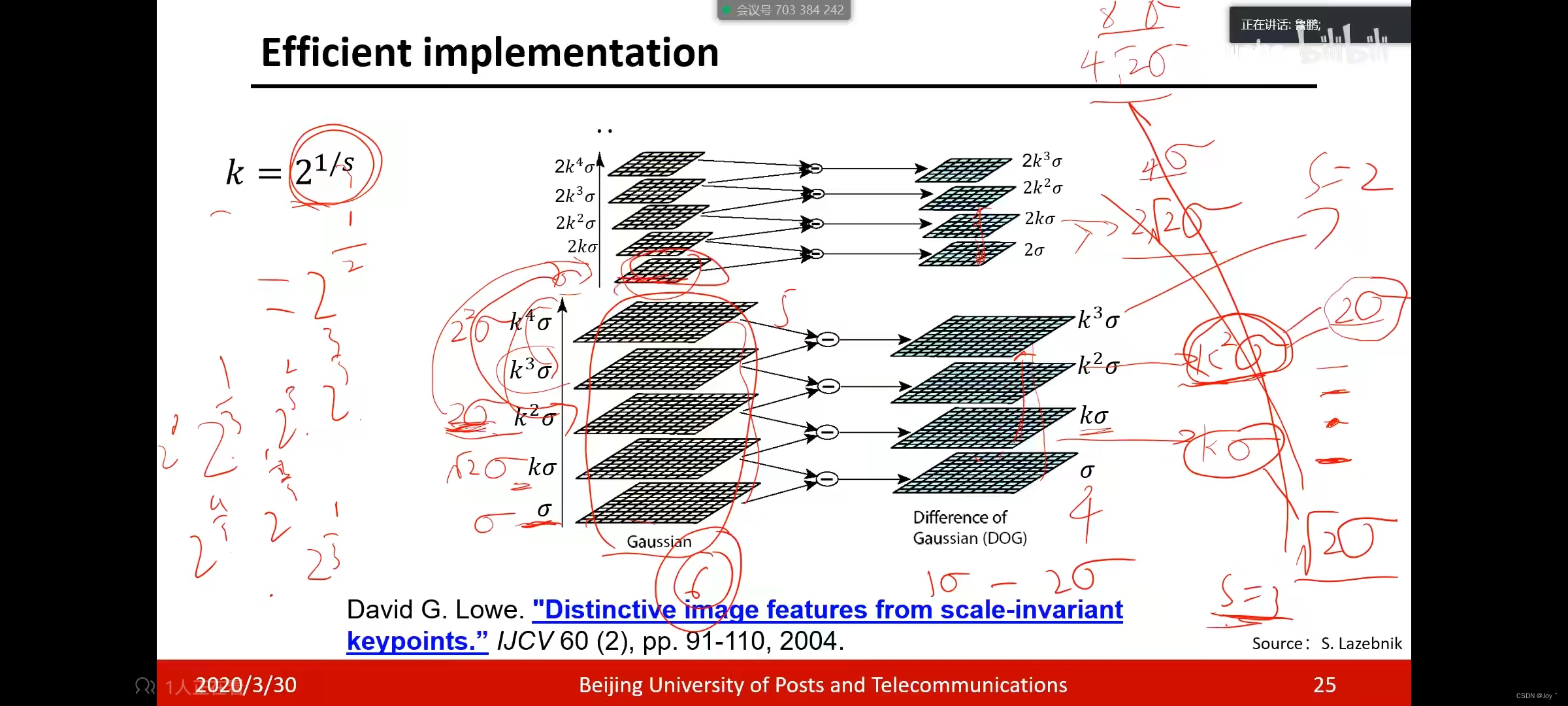
基于2的改进3 分组做DoG和缩放
我们可以先用下面的在原图上做尺度1-2的,然后在上面做缩放,做尺度2-4的,可以与1-2的结果拼接。同理,可以继续做4上的缩放,做4-8的。每个阶段反复看都是1-2。
也就是将1-8分阶段处理,使用两个改进,一个是原图DoG,另一个是原图等比缩放但是高斯模板尺度不变。
实际做的时候,64隔点采样,用32
关于s,怎么选择让尺度变化连续
在原图DoG过程中,左边五个才能推出右边四个,右边四个经过非最大化抑制,推出2个,与上面的原图缩放要连续
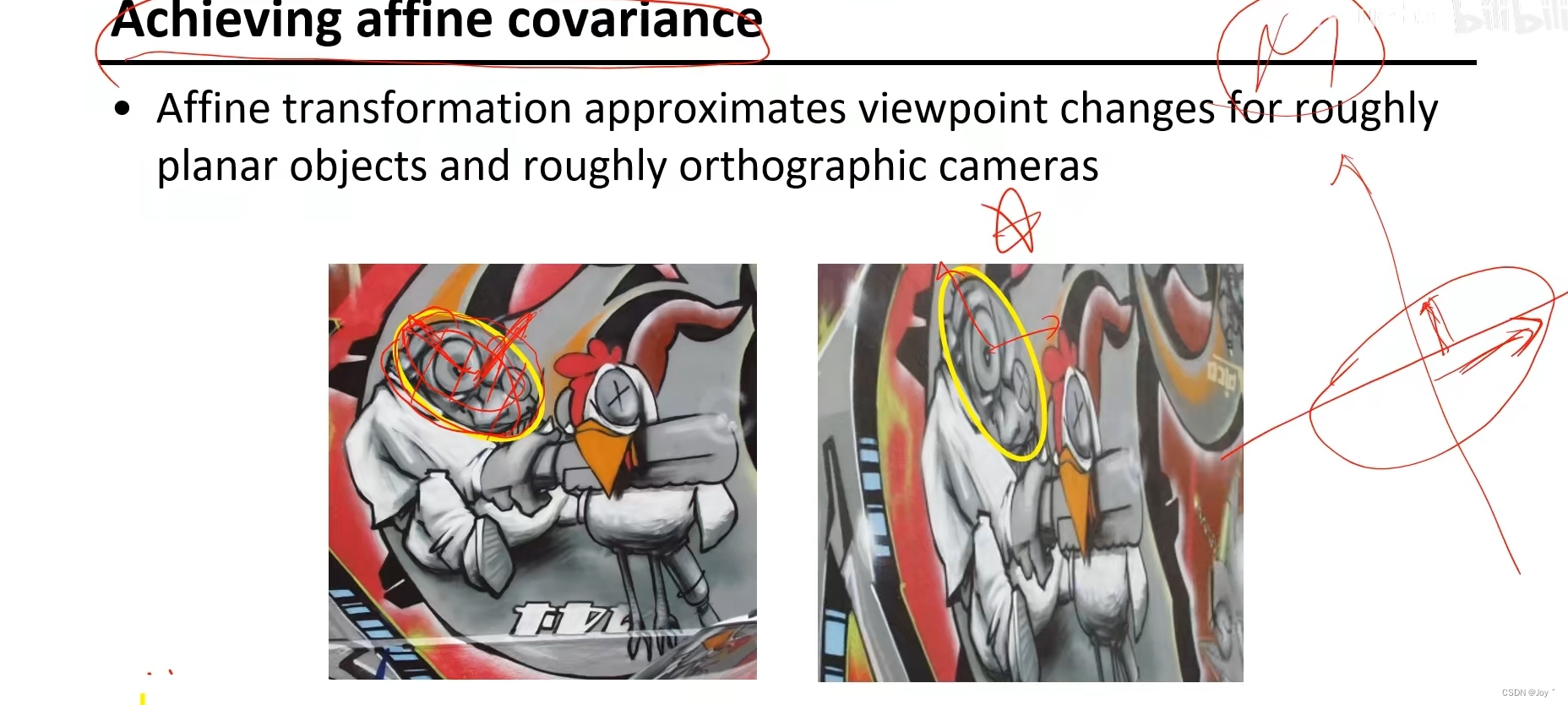
但是SIFT对视角变化有影响
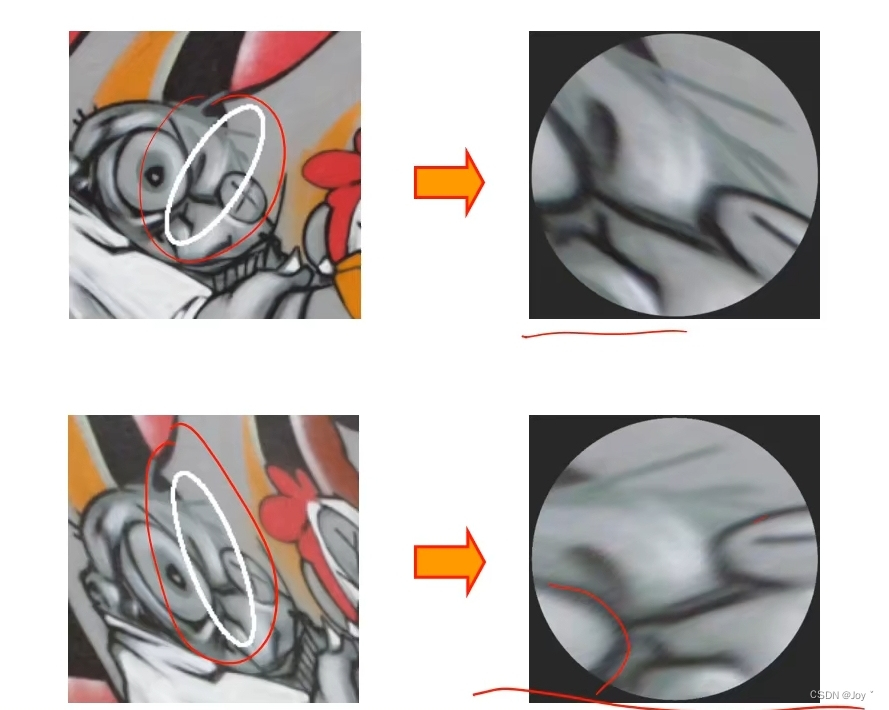
可以针对梯度变化进行拉伸,使得圆变成椭圆正好圈住特征
压扁过程
比较特征点
但是可能存在进行比较的时候,如果两张图拍摄都是平面角度相同还好,相当于等比例放大,但是有的会发现两个特征存在角度差异的问题
我们就计算圆(椭圆)内的所有点的梯度幅度(强度)和角度,然后用直方图统计,横着的为角度,竖着的是填写角度对应的强度,将特征图转最大角度,归一化
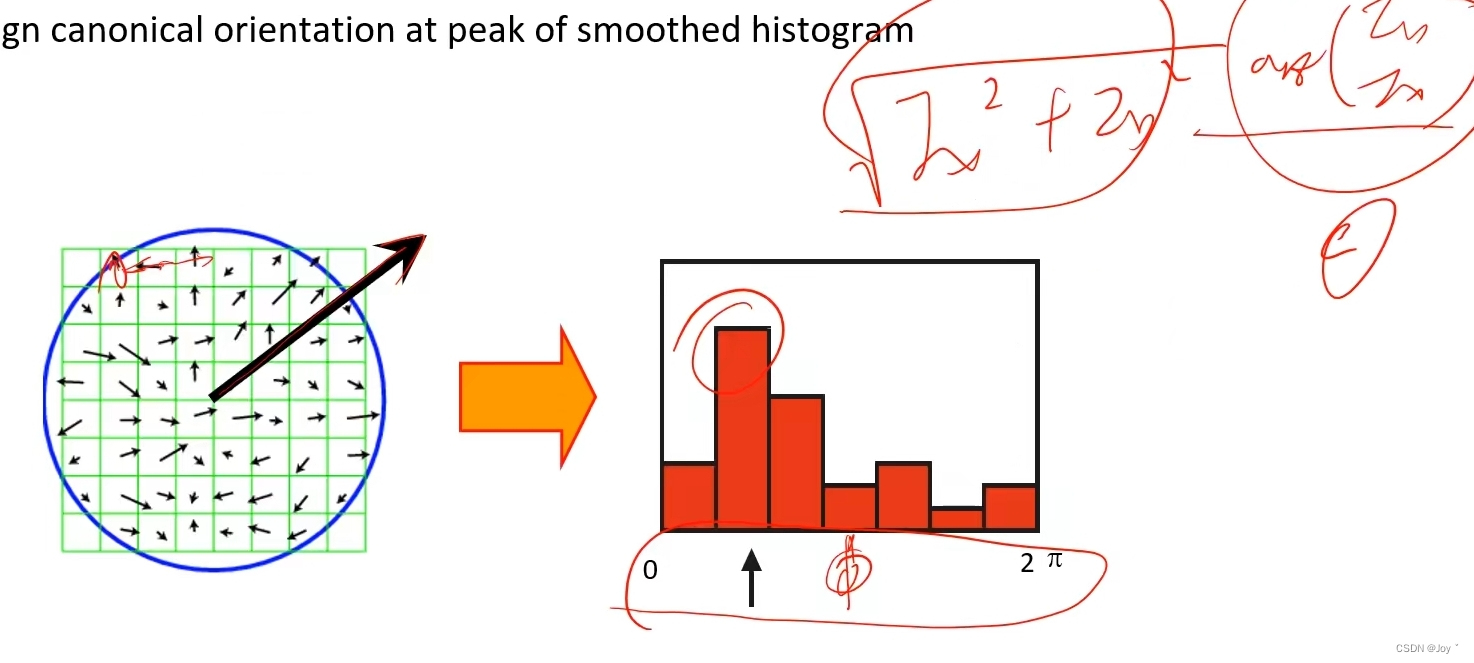
解决了角度差异问题! 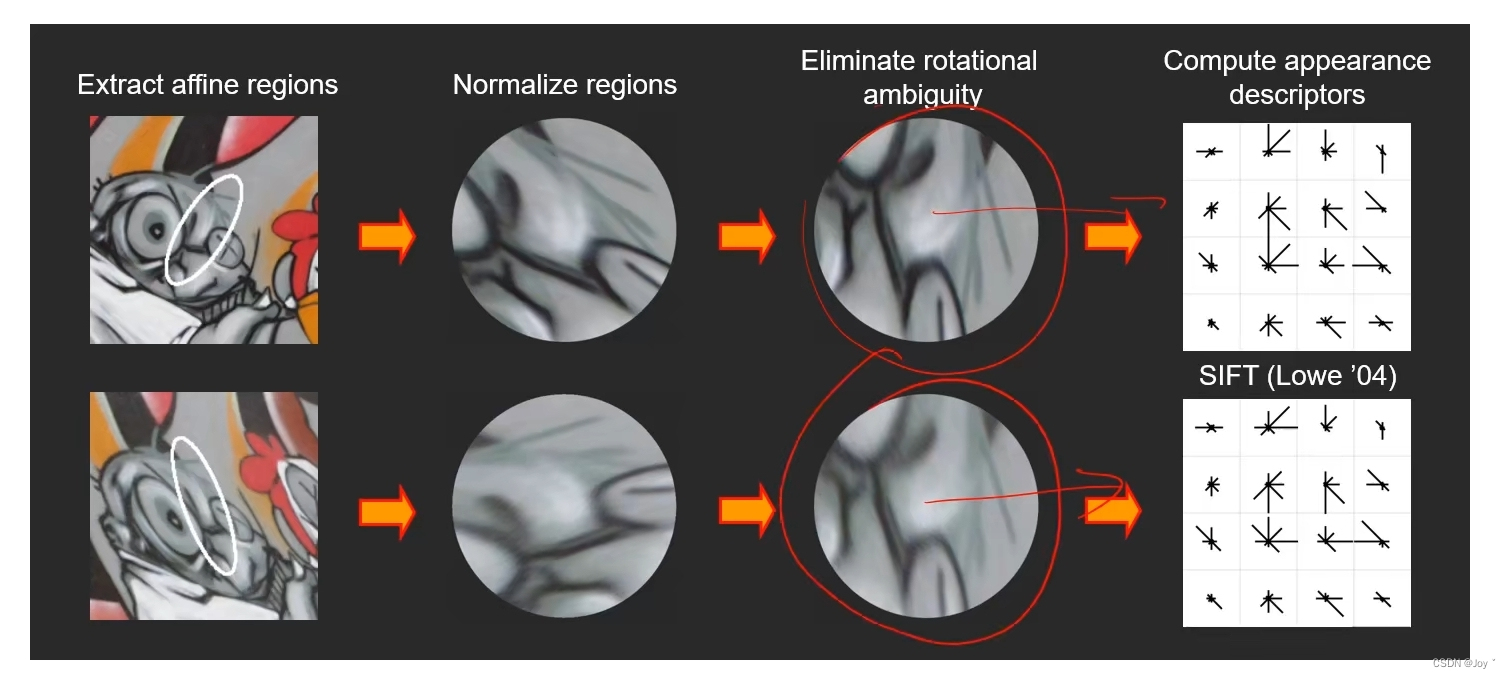
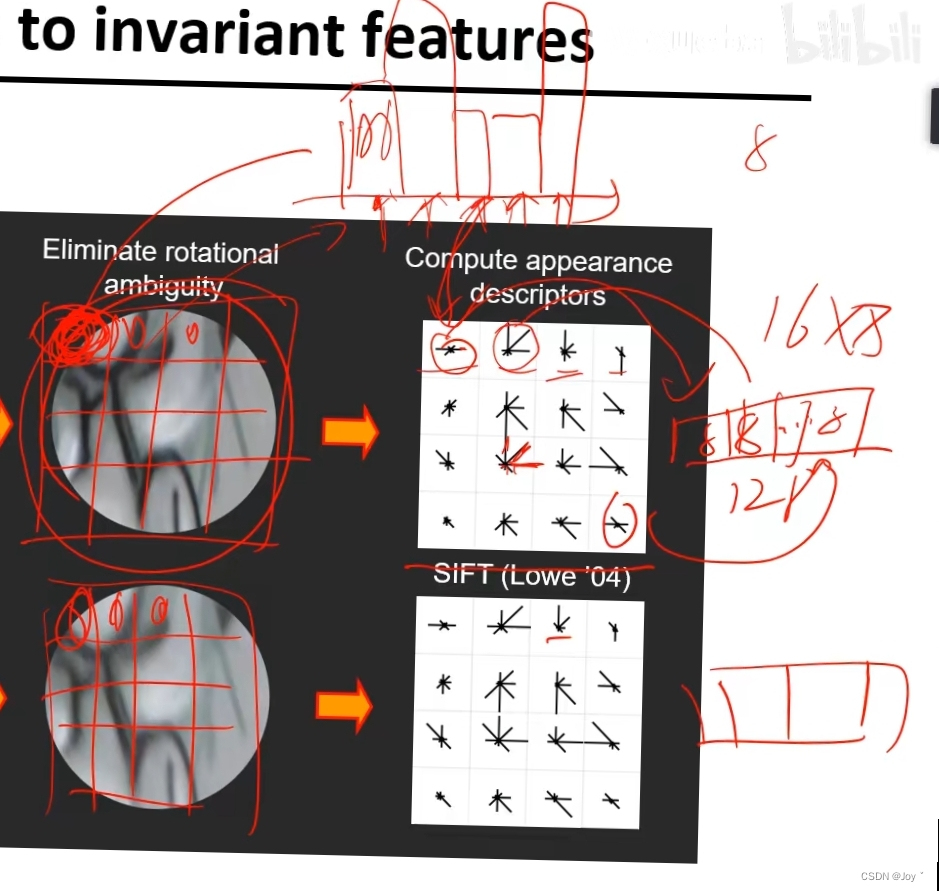
除了尺寸(尺度不变,DoG,缩放),视角(梯度变化压缩圈住),旋转(算梯度旋转归一化)问题解决以外,
还有光线问题,使得两张图不能直接比较
我们用描述符表示,很鲁棒
方法:比如将特征划分16个小区域,然后每个区域算梯度直方图,横轴为8个角度,上下左右对角线。然后16*8个向量组成描述符
分成16格匹配更精准
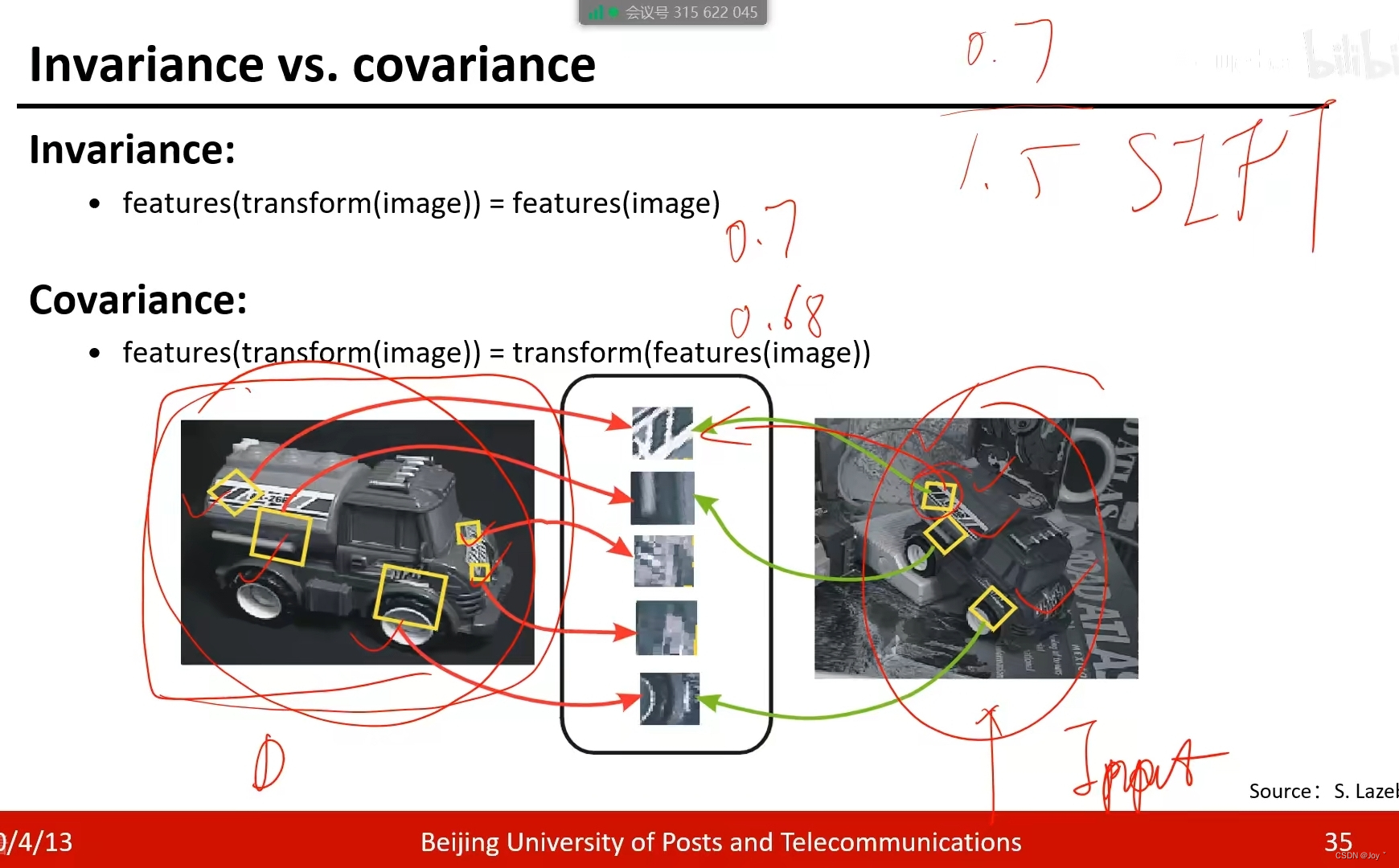
如果左图是库里的,右图是待检验新图。新图提取的特征经过归一描述符后,如果确定与中间的相似?
通过对第一近邻和第二近邻的比值,如果与两个相差不大则不要。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









