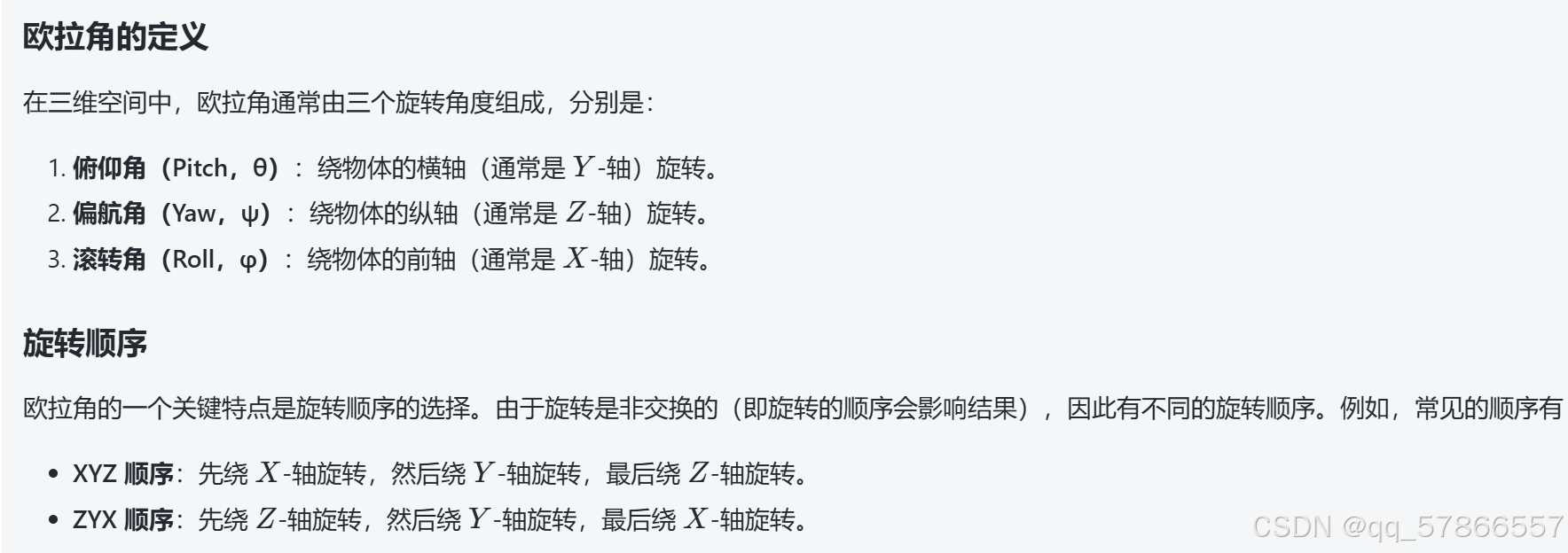
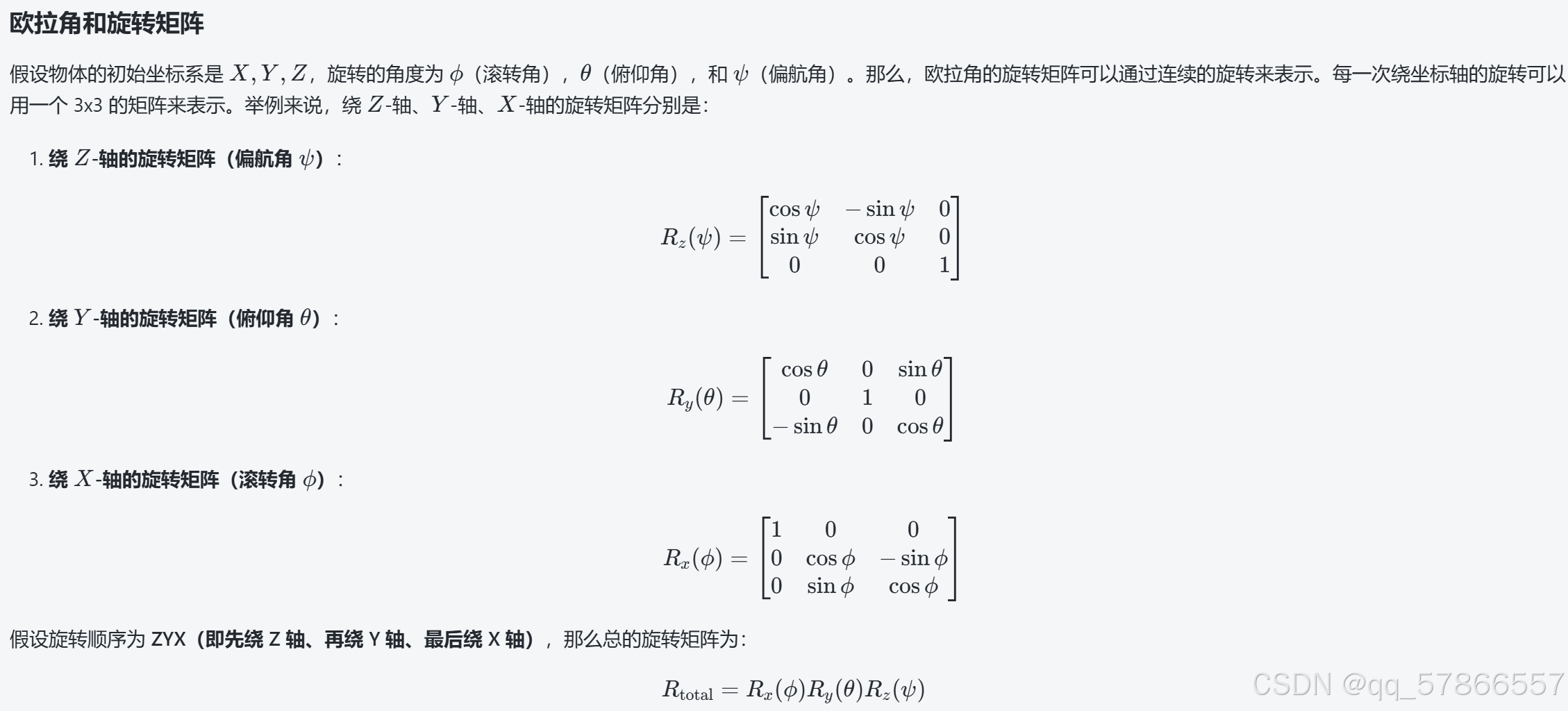
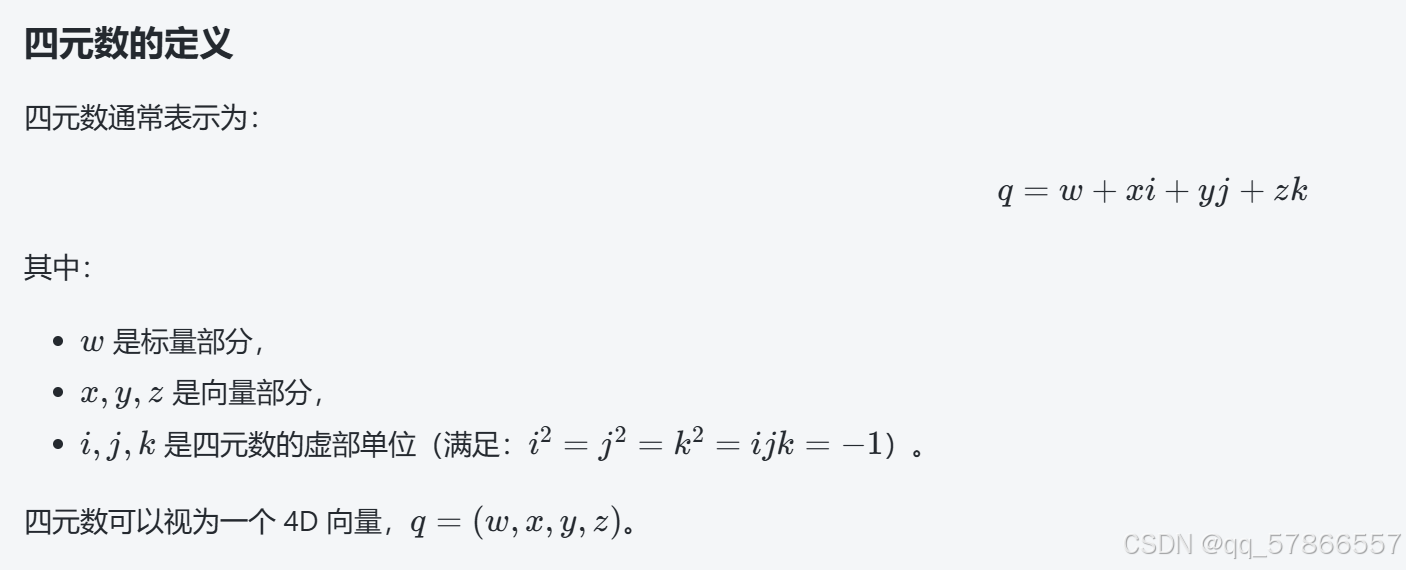
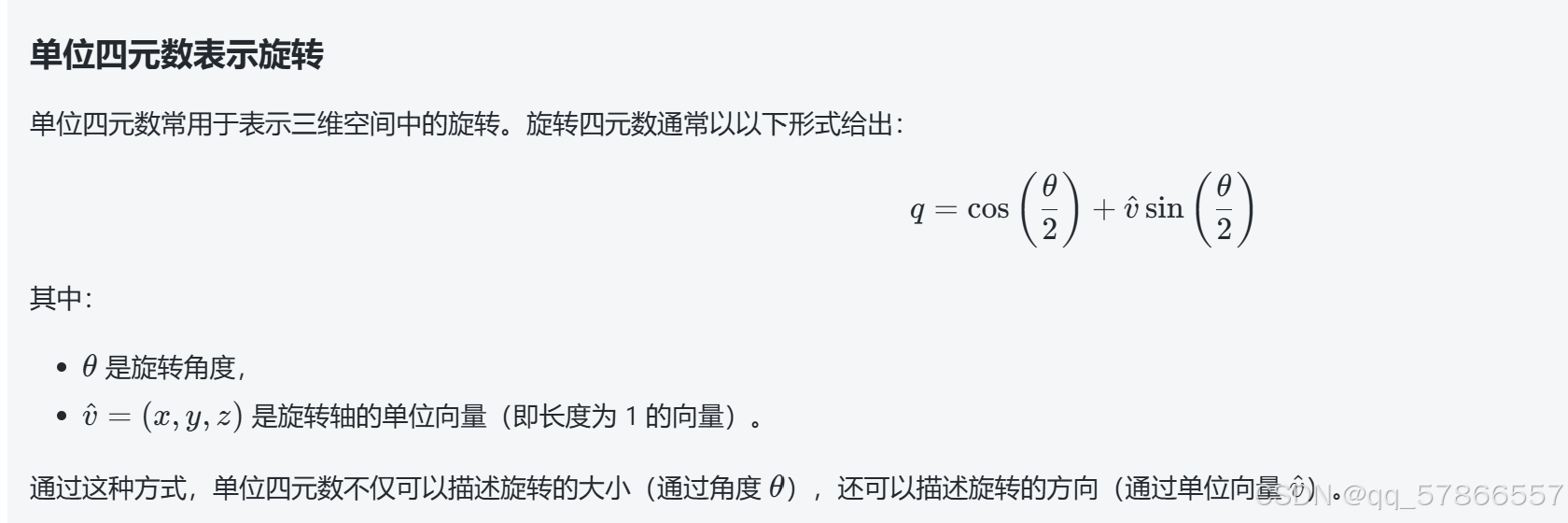
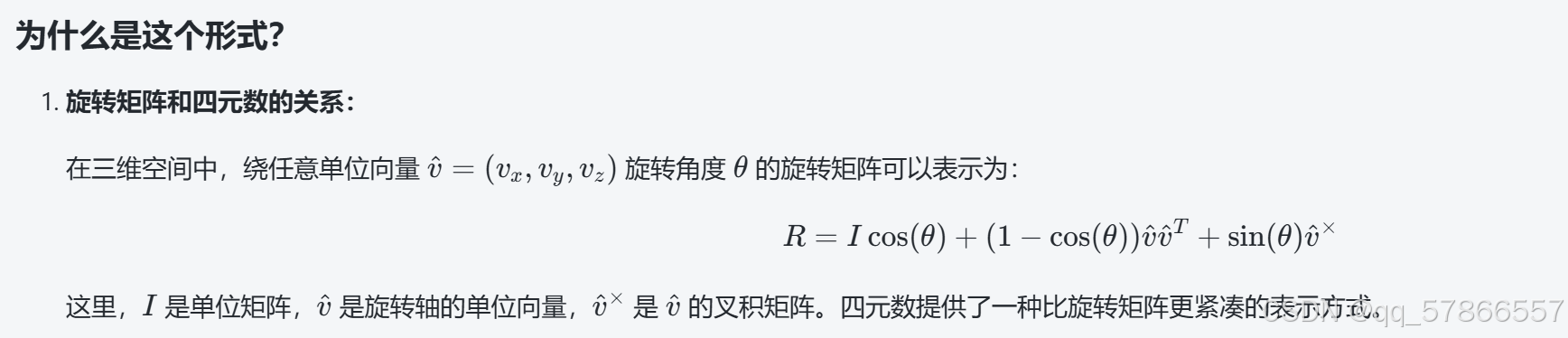
一、欧拉角:欧拉角是一种基于旋转顺序的三维旋转表示方法,常用于描述物体在三维空间中的姿态。它通过三个角度(俯仰角、偏航角、滚转角)来定义物体的旋转。 万向节锁(Gimbal Lock):当欧拉角中的俯仰角(或其中某一个角度)达到某些特定值时,旋转自由度会丢失,导致万向节锁现象。此时,物体无法进行任意的旋转,旋转自由度减少,造成计算上的不便。 二、四元数 上述的R为我们熟悉的Rodriguez公式,可以表示绕任意轴旋转任意角度的旋转矩阵。为什么四元数是这种形式呢?就单纯是为了数学和物理计算

























 444
444

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






