




由于原论文中作者只给出了基于测试集的数据结果分析(结果如下),在自己花了一天的时间训练之后与官网中作者给出的验证集结果进行对比。
pointpillar官方链接:https://github.com/zhulf0804/PointPillars?tab=readme-ov-file
论文链接:https://arxiv.org/abs/1812.05784
代码:GitHub - open-mmlab/OpenPCDet: OpenPCDet Toolbox for LiDAR-based 3D Object Detection.
算法复现:基于kitti数据集的3D目标检测算法的训练流程_mini kitti 数据集-优快云博客
目录
一、测试集结果分析
(一)定量分析
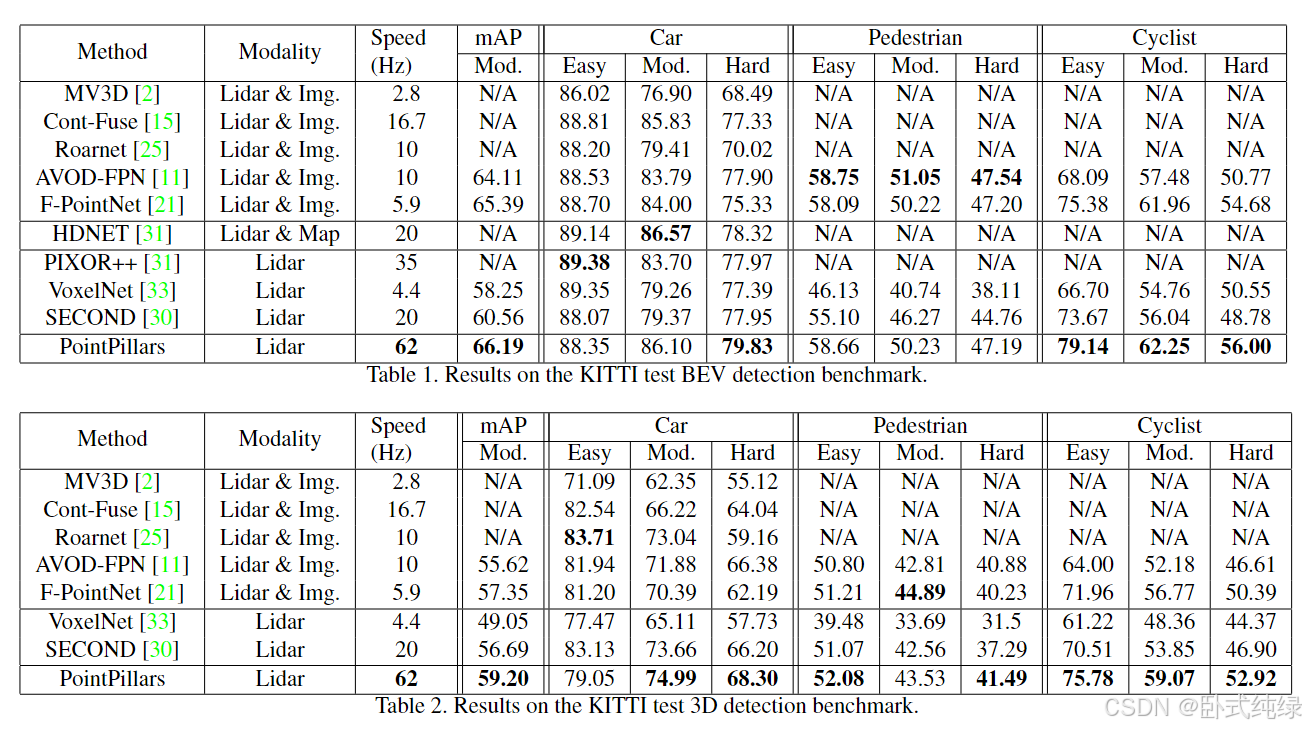
上表是KITTI测试BEV检测基准的结果,下表是KITTI测试3D检测基准的结果。所有检测结果均使
用官方KITTI评估指标进行测量,即:鸟瞰图(BEV)、3D、2D和平均方向相似度(AOS)。2D检测在图像平面上完成,平均方向相似度评估二维检测的平均方向(以BEV为单位测量)。KITTI 数据集分为简单、中等和困难的困难,官方 KITTI 排行榜按中等性能排名。如上表 所示,PointPillars 在平均精度 (mAP)方面优于所有已发布的方法。与仅激光雷达的方法相比,PointPillars 在所有类和难度层上都取得了更好的结果,除了简单的汽车层。它还优于基于汽车和骑自行车的人的融合方法。
虽然 PointPillars 预测 3D 定向框,但 BEV 和 3D 指标没有考虑方向。使用 AOS评估方向,这需要将 3D 框投影到图像中,执行 2D 检测匹配,然后评估这些匹配的方向。与仅预测定向框的两种 3D 检测方法相比,PointPillars 在 AOS 上的性能在所有层中显着超过。一般来说,只有图像的方法在2D检测上表现最好,因为盒子在图像中的三维投影可以导致松散的盒子,这取决于3D姿势。尽管如此,PointPillars中度自行车AOS为68.16优于最好的基于图像的方法。

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 9238
9238

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









