






 本文介绍了脉冲宽度调制(PWM)的基本概念及其在电机控制中的应用,详细阐述了如何通过调整PWM的占空比和频率来控制电机转速。此外,还提供了使用CubeMX配置STM32芯片以实现PWM输出的步骤,包括选择定时器、配置时钟树和设置占空比等关键操作。
本文介绍了脉冲宽度调制(PWM)的基本概念及其在电机控制中的应用,详细阐述了如何通过调整PWM的占空比和频率来控制电机转速。此外,还提供了使用CubeMX配置STM32芯片以实现PWM输出的步骤,包括选择定时器、配置时钟树和设置占空比等关键操作。
1.PWM简介
脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调试。是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。广泛应用在从测量、通信到功率控制与变换的许多领域中。
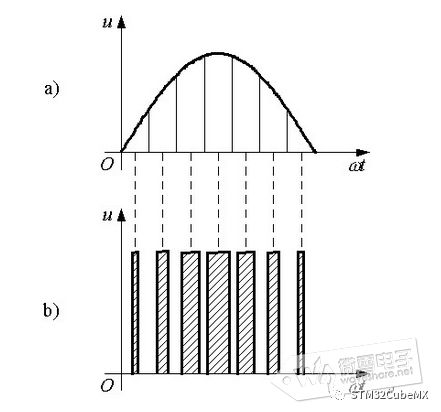
例如上图中,图b)是微处理输出的数字信号,实际上他接到电机等功率设备上时,效果相当于图a)。这就是PWM调制。例如输出占空比为50%,频率为10Hz的脉冲,高电平为3.3V.则其输出的模拟效果相当于输出一个1.65V的高电平。脉冲调制有两个重要的参数,第一个就是输出频率,频率越高,则模拟的效果越好。第二个就是占空比。占空比就是改变输出模拟效果的电压大小。占空比越大则模拟出的电压越大。
2.电机转动原理
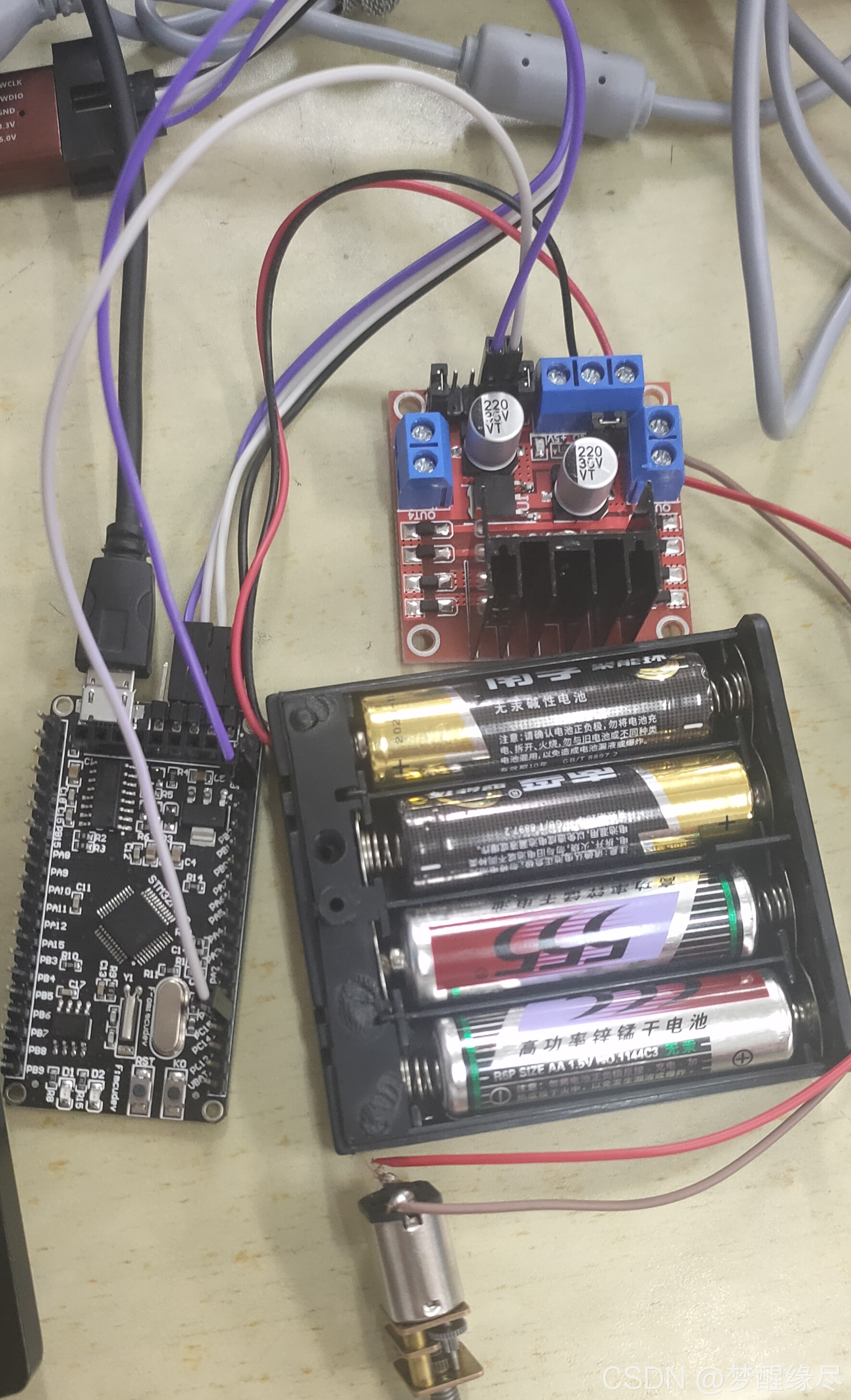
这里以直流减速电机为例
通过调制器PWM给电机提供一个具有一定频率的脉冲宽度可调的脉冲电。脉冲宽度越大即占空比越大,提供给电机的平均电压越大,电机转速就高。反之脉冲宽度越小,则占空比越越小。提供给电机的平均电压越小,电机转速就低。
3.CubeMX设置dakai
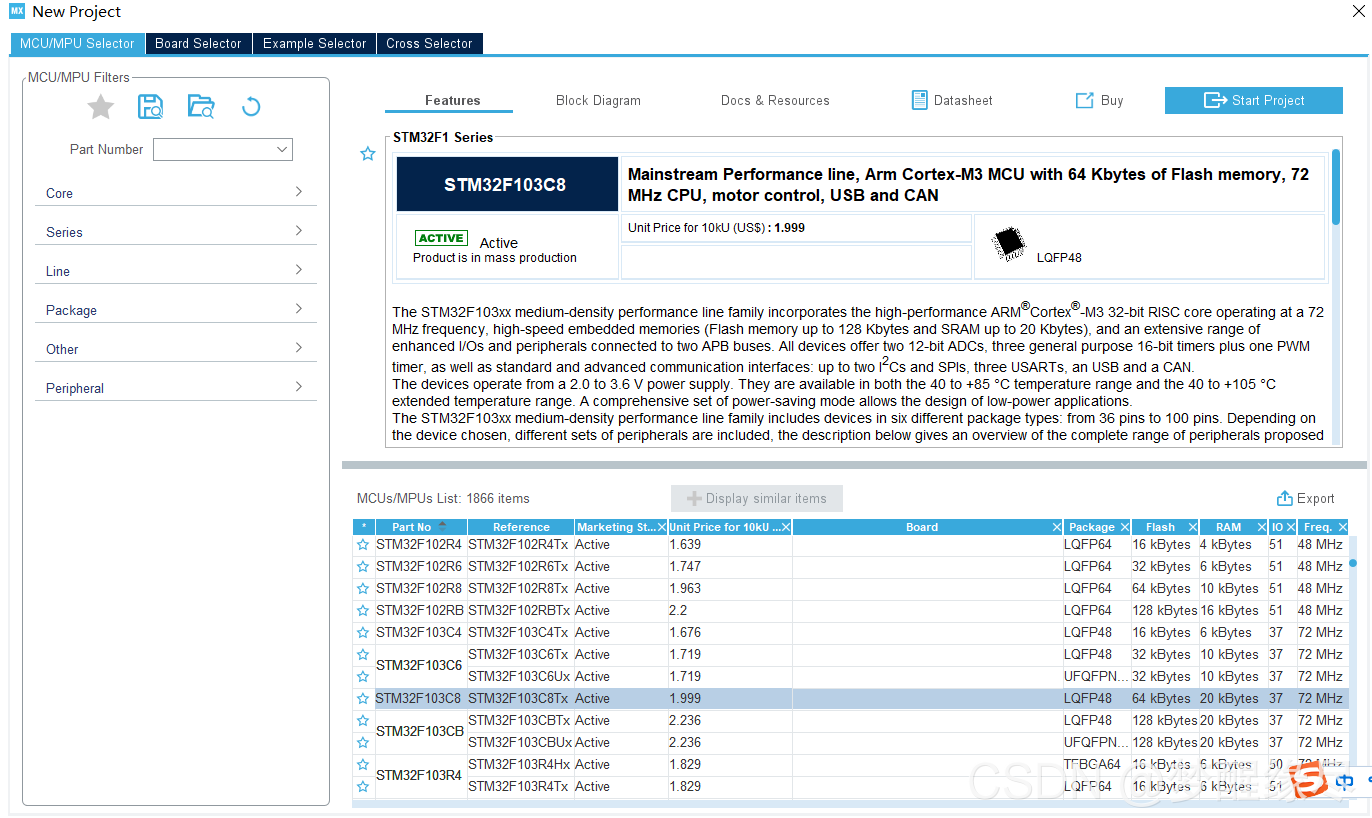
(1)选择芯片
(2)打开定时器,并进行配置
首先需要清楚的是,当我们使用L298N电机驱动模块的默认配置时,我们是通过PWM输出高电压,另外一个直接与单片机接地就好了。所以我们只需要使用5个定时器中的一个,这里选择普通的定时器二,定时器一为特殊定时器。
打开PA0管脚
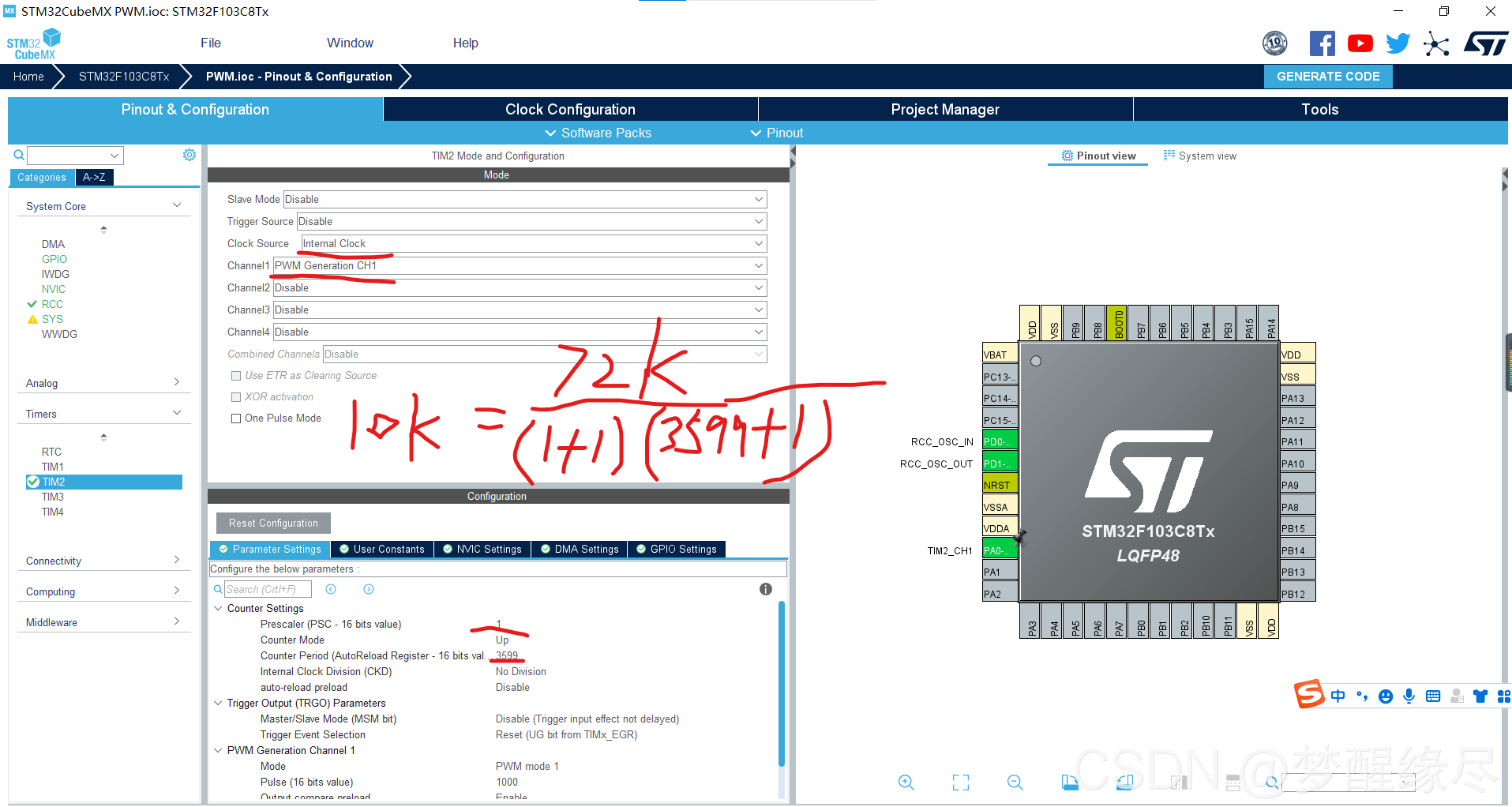
这里使用内部时钟(72KHZ),配置产生的输出频率为10KHZ
(3)时钟树配置
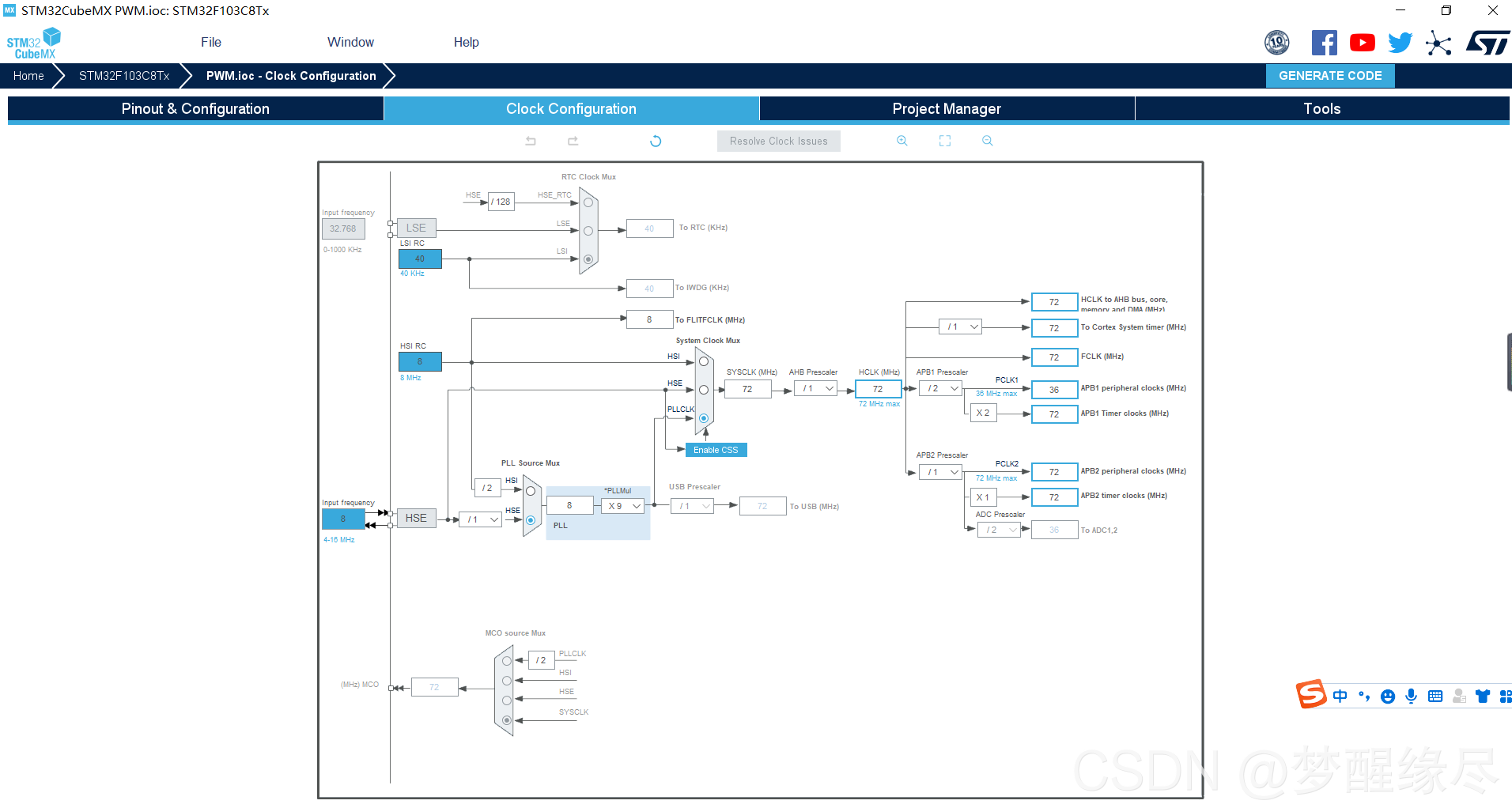
没啥说的,照着来就行了
(4)设置输出
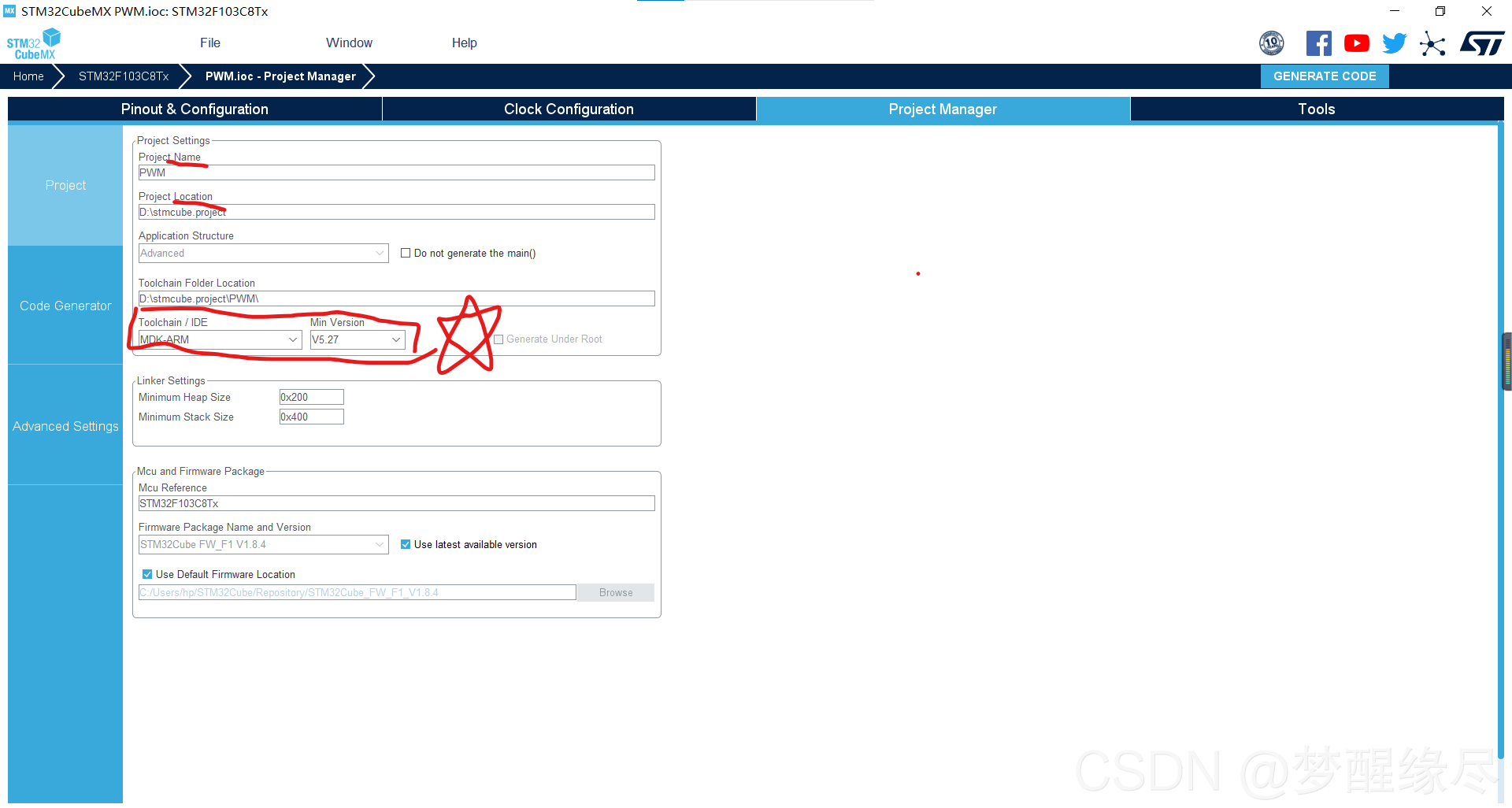
(5)GENERATE CODE
4. 打开你的MDK
设置占空比:对TIM2-CRR1赋值
(PS:不要超过ARR)
打开定时器

















 3207
3207

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









