






数据结构
| 题型 | 题数 | 分值 |
|---|---|---|
| 选择 | 10 | 20 |
| 填空 | 10 | 20 |
| 判断 | 10 | 20 |
| 综合应用 | 4 | 20 |
| 算法 | 2 | 20 |
第一章 绪论
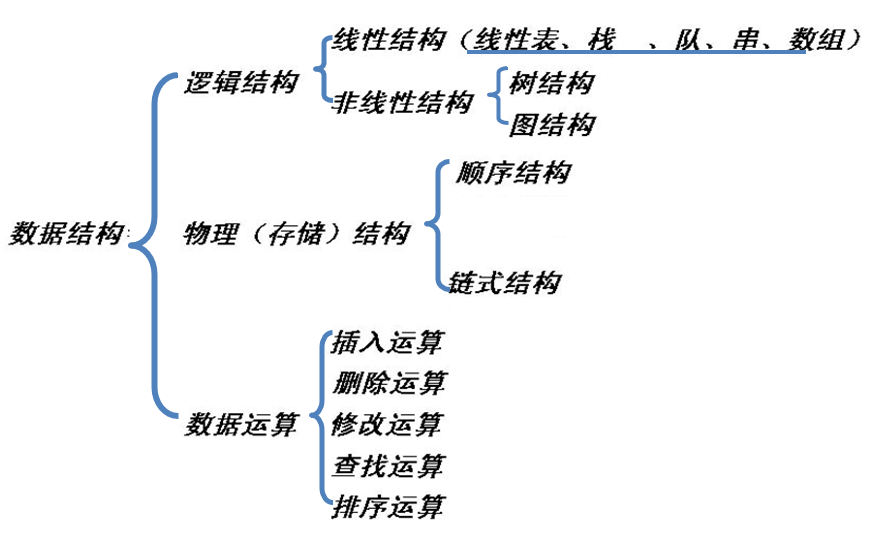
逻辑结构:
- 集合结构 仅属同一集合
- 线性结构 一对一
- 树结构 一对多
- 图结构 多对多 、
物理结构:
亦称存储结构,是数据的逻辑结构在计算机存储器内的表示(或映像)。它依赖于计算机。
算法的五个基本特性:
- 输入:一个算法有零个或多个输入。
- 输出 :一个算法有一个或多个输出。
- 有穷性:一个算法必须总是在执行有穷步之后结束,且每一步都在有穷时间内完成。
- 确定性:算法中的每一条指令必须有确切的含义,在任何条件下,只有唯一的一条执行路径,即对于相同的输入只能得到相同的输出。
- 可行性:算法描述的操作可以通过已经实现的基本操作执行有限次来实现。
算法设计的要求:
- 正确性
- 可读性
- 健壮性
- 高效性
第二章 线性表
| 存储结构 比较项目 | 顺序表 | 链表 |
|---|---|---|
| 存储空间 | 预先分配,会导致空间闲置或溢出现象 | 动态分配,不会出现存储空间闲置或溢出现象 |
| 存储密度 | 不用为表示结点间的逻辑关系而增加额外的存储开销,存储密度等于1 | 需要借助指针来体现元素间的逻辑关系,存储密度小于1 |
| 存取元素 | 随机存取,按位置访问元素的时间复杂度为O(1) | 顺序存取,按位置访问元素时间复杂度为O(n) |
| 插入删除 | 平均移动约表中一半元素,时间复杂度为O(n),插入一个元素需要平均移动** n 2 \frac{n}{2} 2n个元素,删除一个元素需要平均移动 n − 1 2 \frac{n-1}{2} 2n−1**个元素 | 不需移动元素,确定插入、删除位置后,时间复杂度为O(1) |
| 适用情况 | ① 表长变化不大,且能事先确定变化的范围 ② 很少进行插入或删除操作,经常按元素位置序号访问数据元素 | ① 长度变化较大 ② 频繁进行插入或删除操作 |
第三章 栈和队列
栈:先进后出
队列:先进先出
- 栈满 S.top-S.base==S.stacksize
- 栈空 base == top
- 循环入队: sq[rear]=x; rear=(rear+1)%M
- 循环出队:x=sq[front]; front=(front+1)%M
- 循环队列满 (rear+1)% M==front
- 循环队列空 front==rear
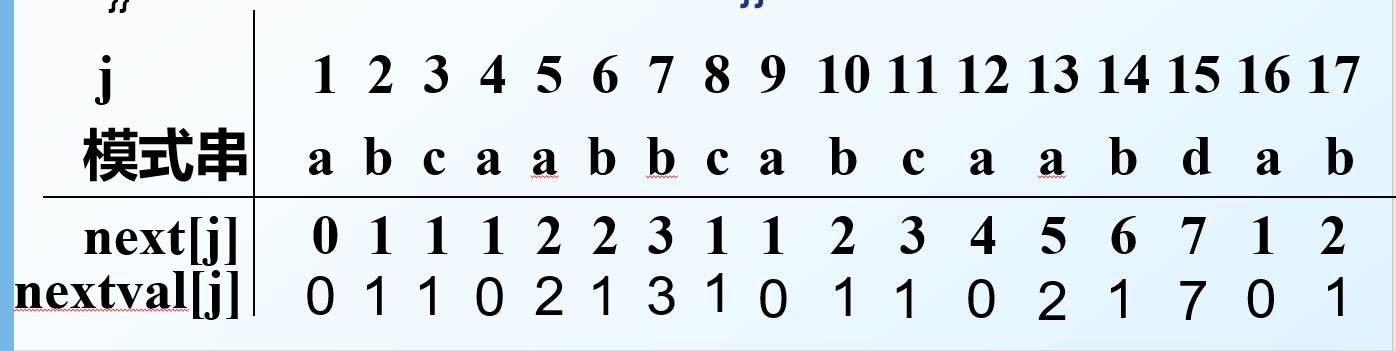
第四章 串、数组和广义表
第五章 树和二叉树
二叉树性质
-
在二叉树的第i层上至多有2i-1个结点
-
第i层上至少有 1 个结点
-
深度为k的二叉树至多有2K-1个结点
-
深度为k的二叉树至少有 k 个结点
-
对于任何一棵二叉树T,如果其叶子结点数为n0,度为2的结点数为n2,则n0=n2+1
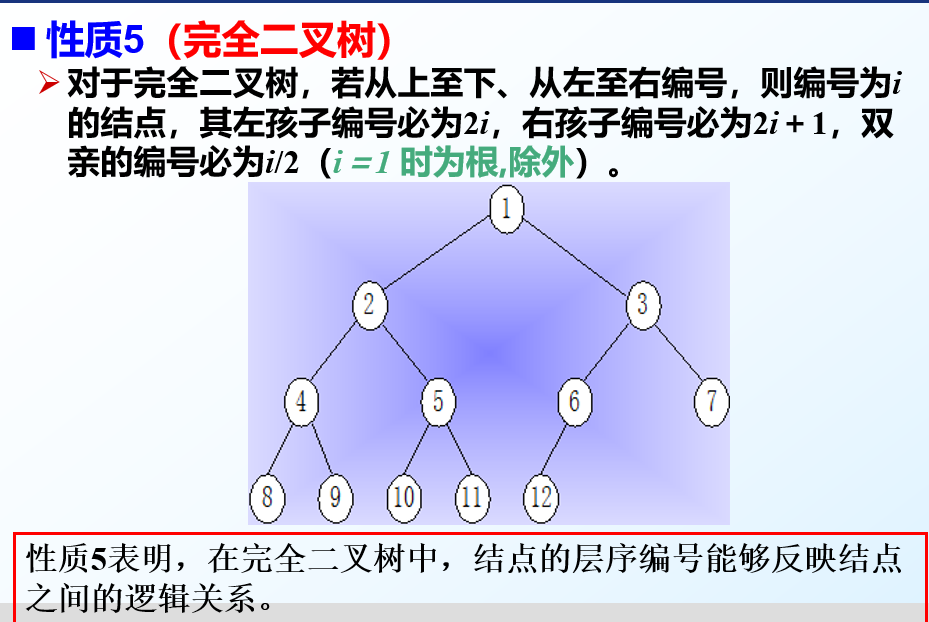
完全二叉树
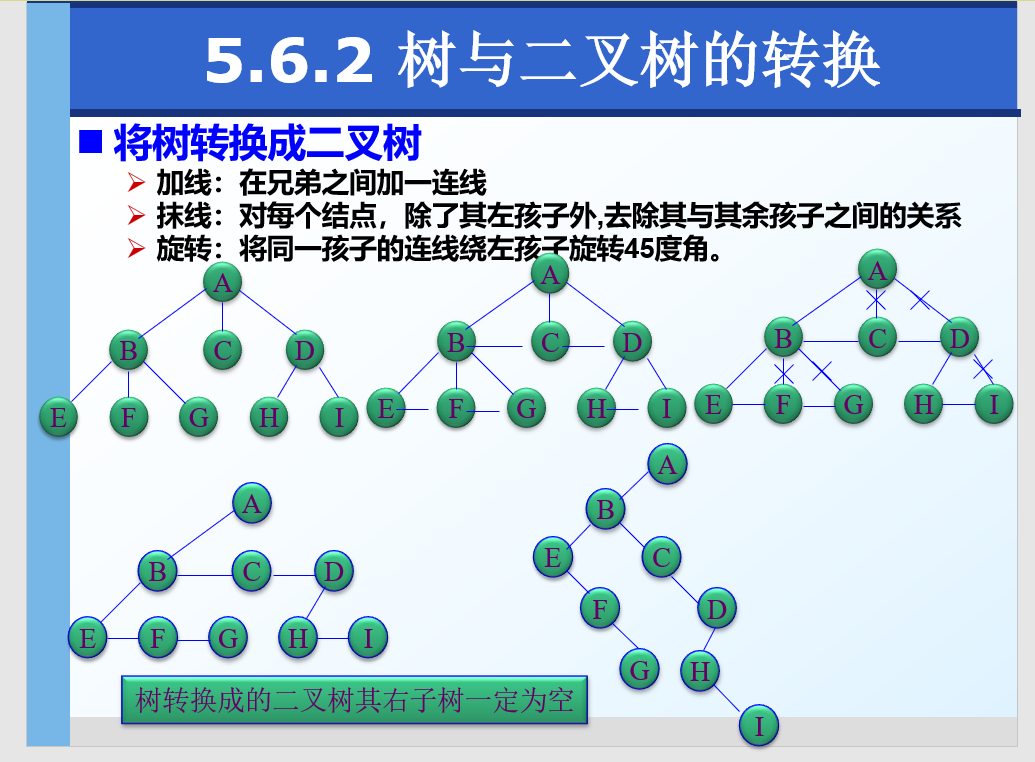
树与二叉树之间的转换
树转换为二叉树
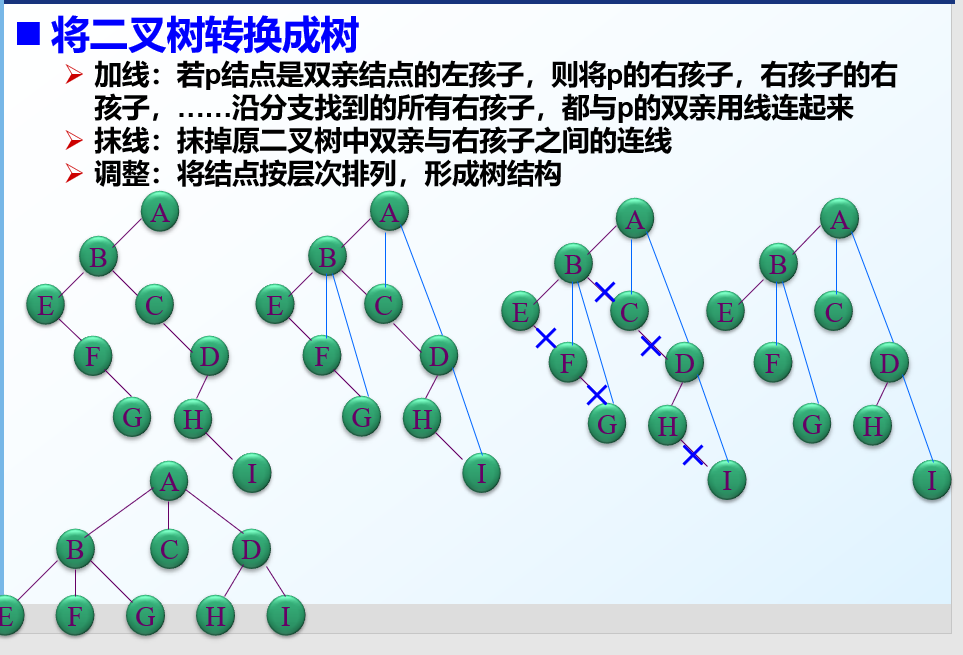
将二叉树转换成树
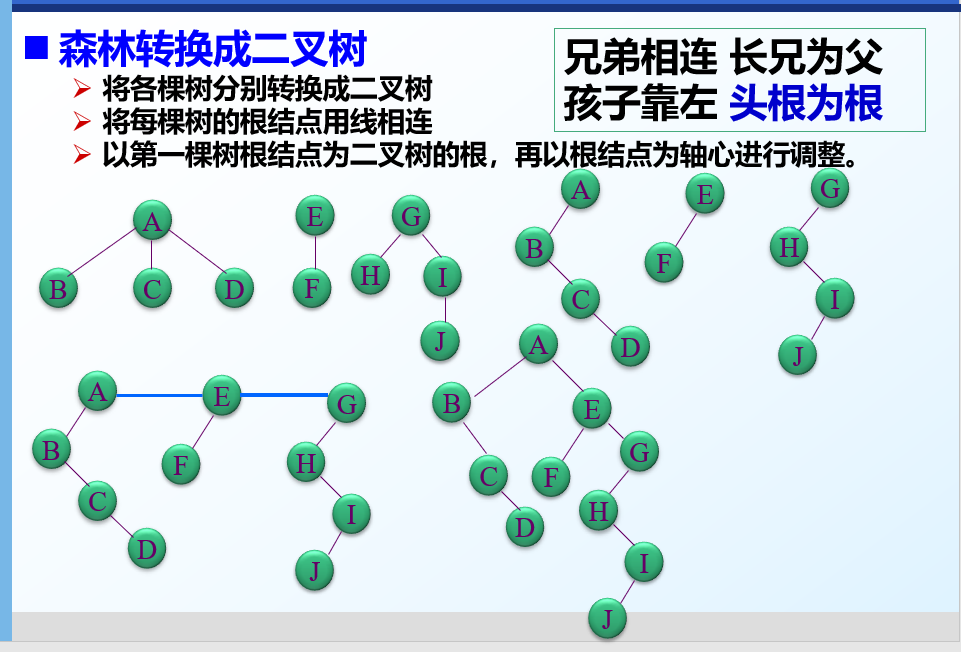
森林转为二叉树
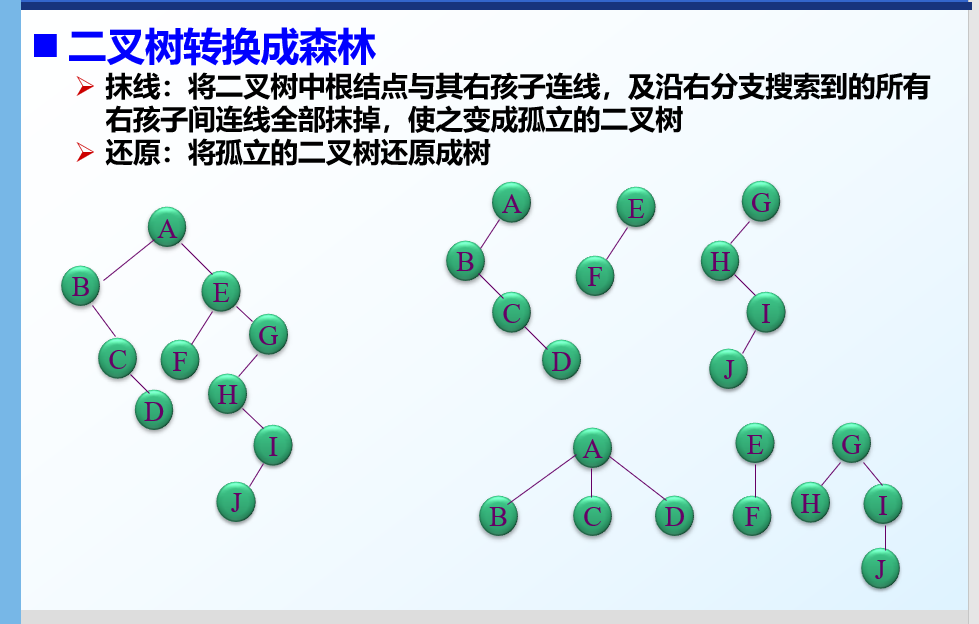
二叉树转换为森林
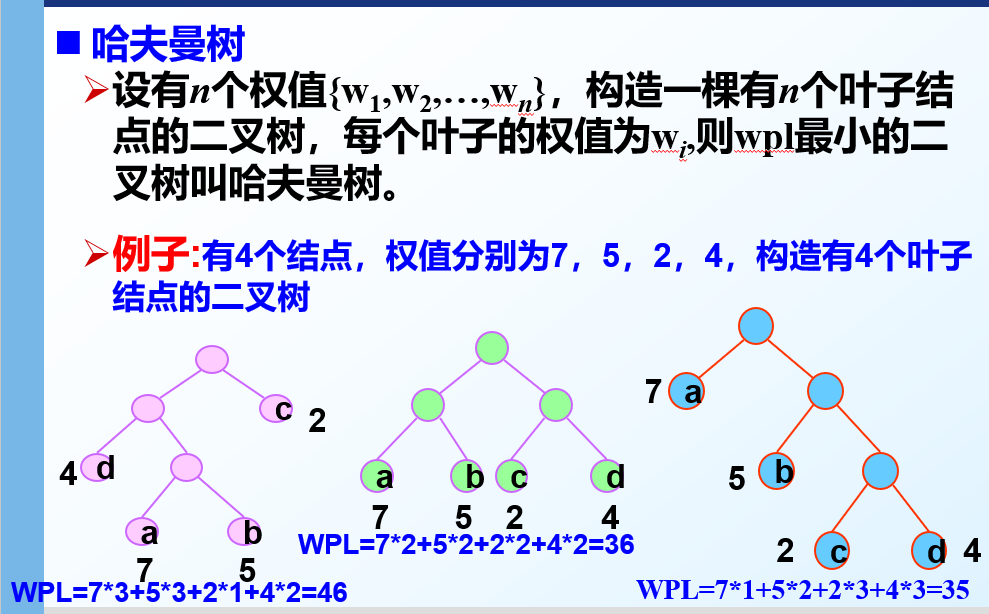
哈夫曼树 哈夫曼编码
第六章 图
最小生成树
Kruskal(克鲁斯卡尔)算法(不能画圈)
- 归并边,适于稀疏网
- 时间复杂度:O(eloge)
- 存储表示: 邻接表
Prim(普里姆)算法 (画圈)
- 归并顶点,与边数无关,适于稠密网
- 时间复杂度:O(n2)
- 存储表示: 邻接矩阵
| 算法名 | 普里姆算法 | 克鲁斯卡尔算法 |
|---|---|---|
| 时间复杂度 | O(n2) | O(eloge) |
| 适应范围 | 稠密图 | 稀疏图 |
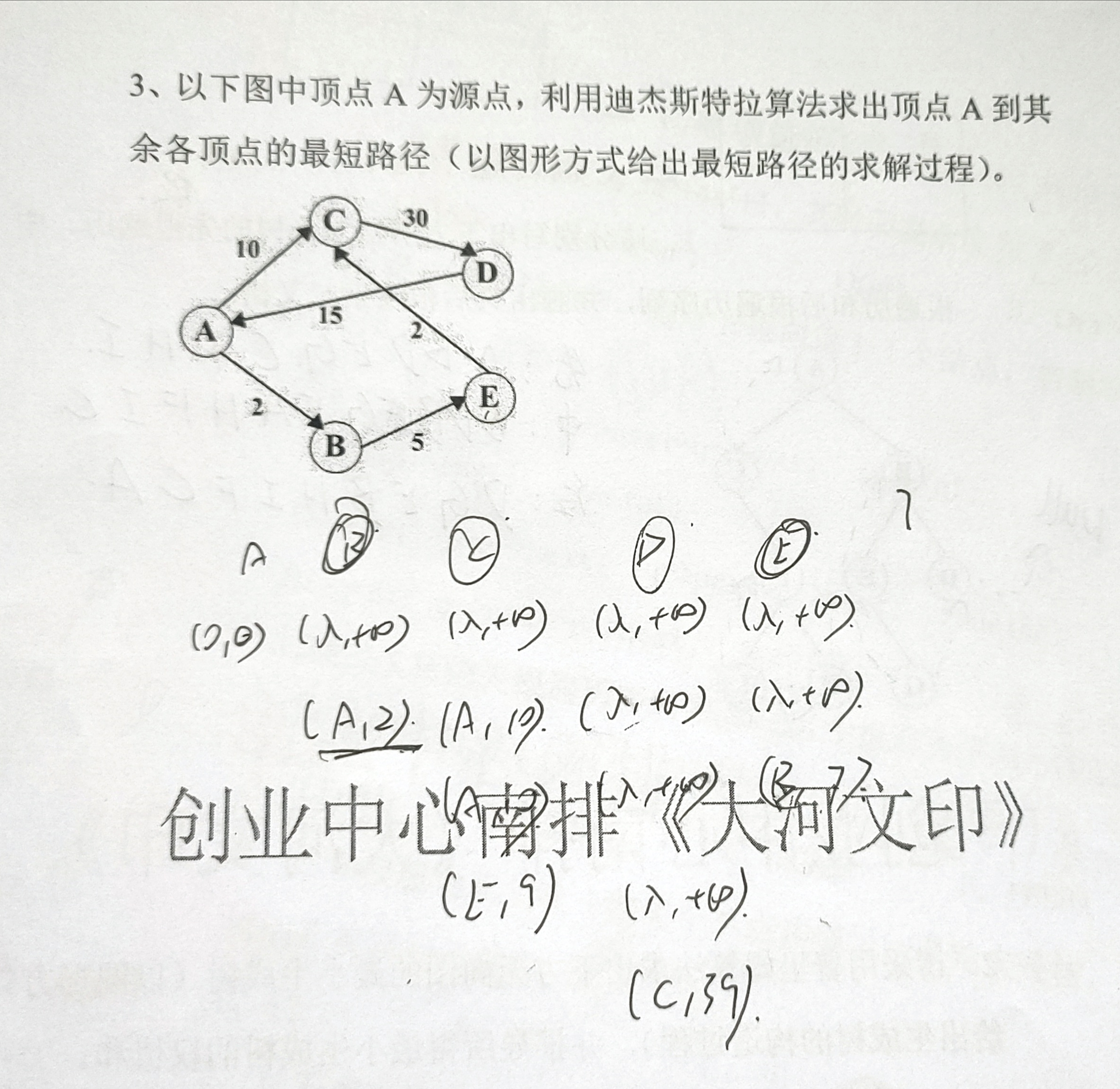
最短路径
Dijkstra算法思想
先找出从源点v0到各终点vk的直达路径(v0,vk),即通过一条弧到达的路径。
从这些路径中找出一条长度最短的路径(v0,u),然后对其余各条路径进行适当调整:
若在图中存在弧(u,vk),且(v0,u)+(u,vk)<(v0,vk),则以路径(v0,u,vk)代替(v0,vk)。
在调整后的各条路径中,再找长度最短的路径,依此类推
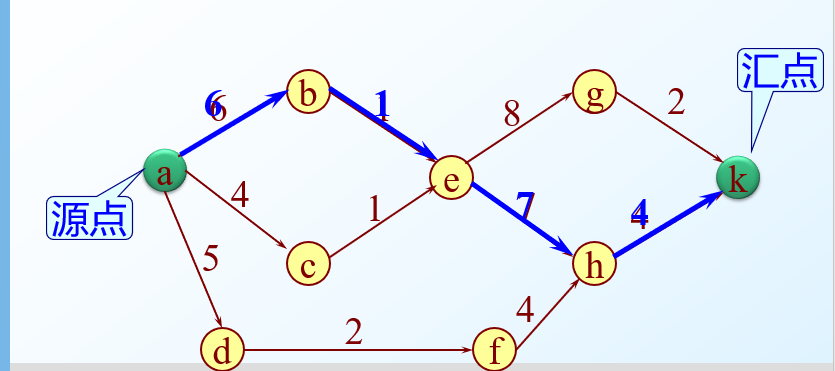
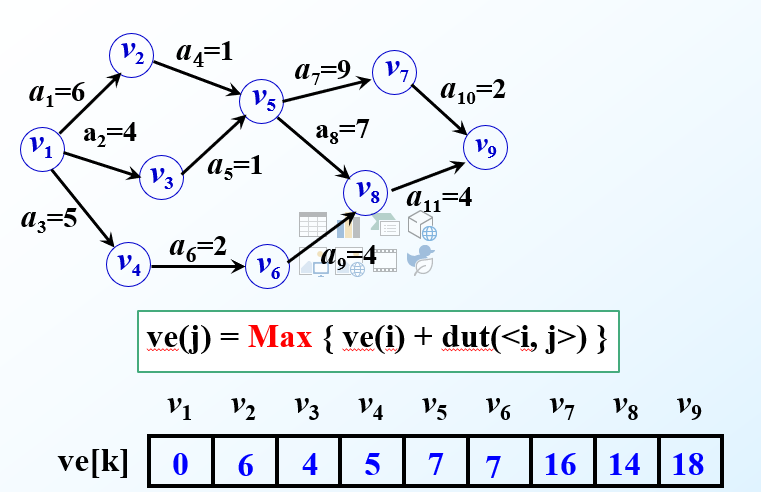
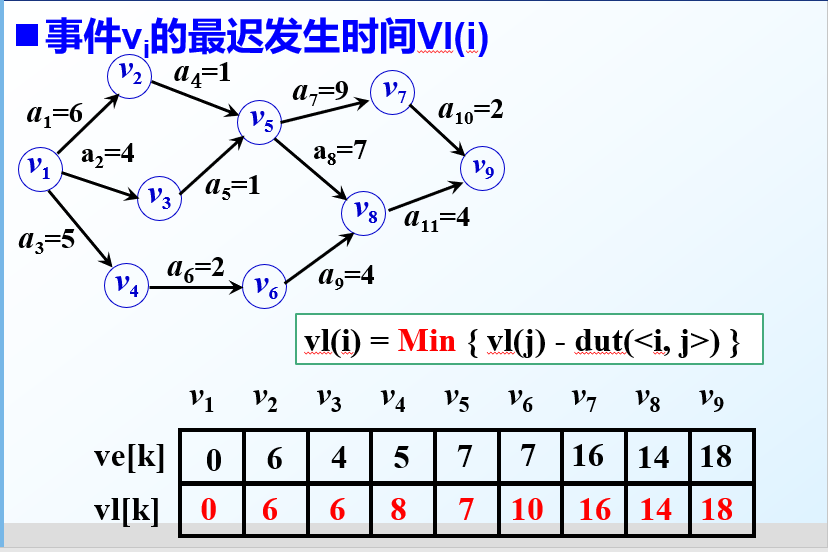
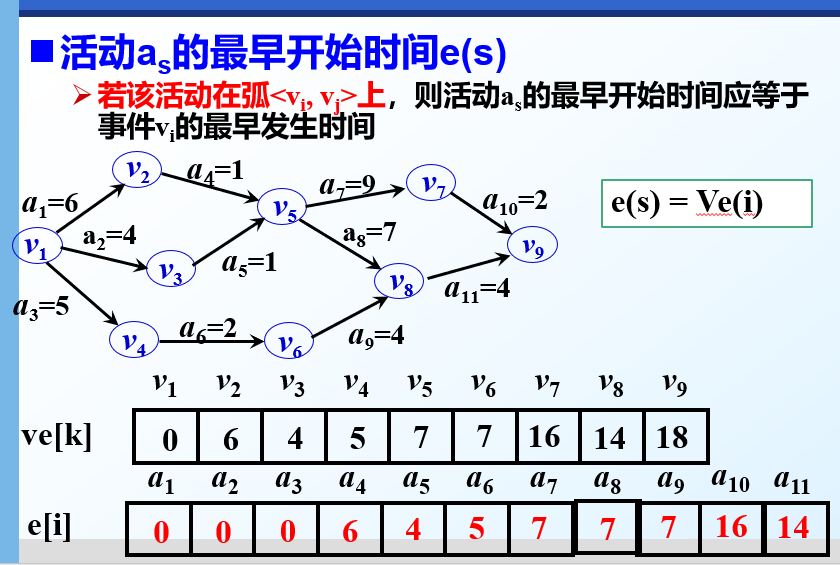
关键路径
- 关键路径长度是整个工程所需的最短工期
事件vj的最早发生时间Ve(j)
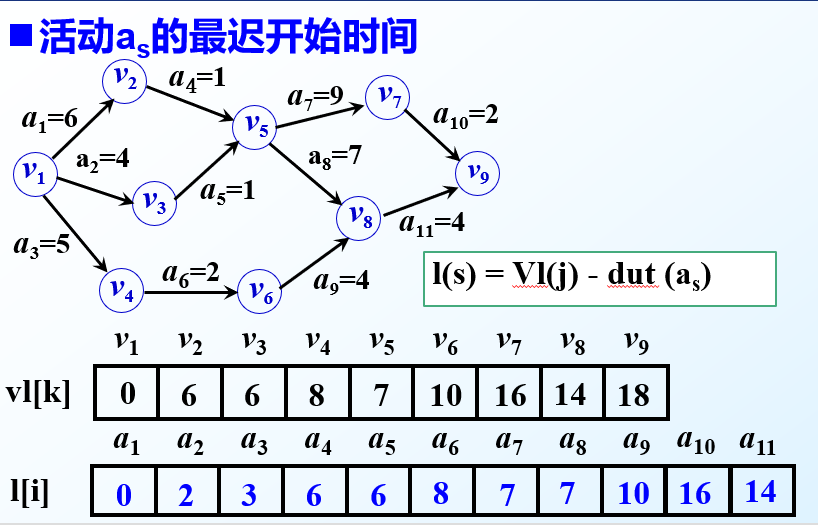
事件vi的最迟发生时间Vl(i)
活动as的最早开始时间e(s)
活动as的最迟开始时间l(s)
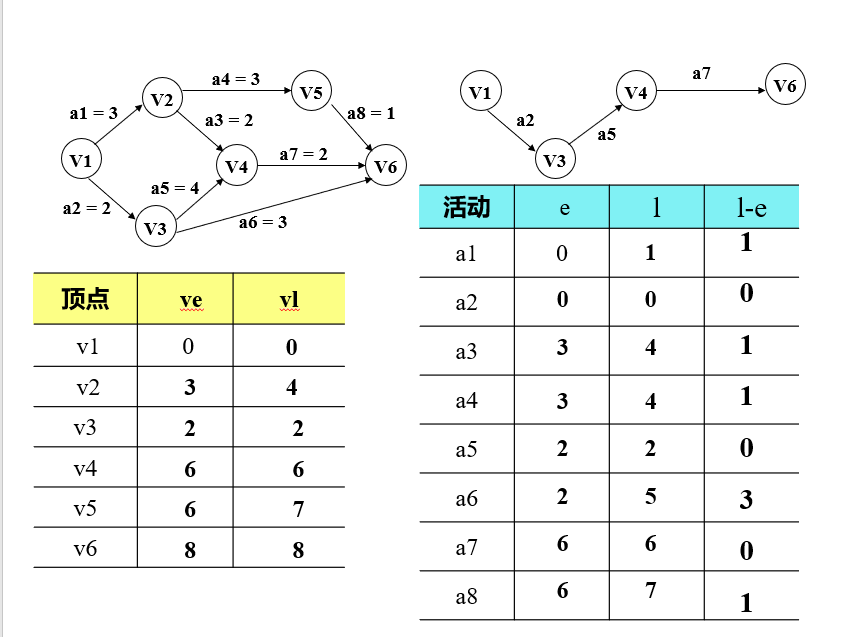
例题
第七章 查找
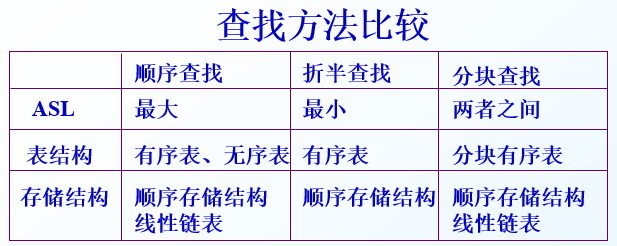
| 查找名称 | 最好情况 | 最坏情况 | 平均情况 |
|---|---|---|---|
| 顺序查找 | O(1) | O(n) | n + 1 2 \frac{n+1}{2} 2n+1(平均查找次数) |
| 折半查找 | O(logn) | ||
| 分块查找 | O(logn) | ||
| 二叉排序树查找 | O(logn) |
分块查找(索引顺序查找)
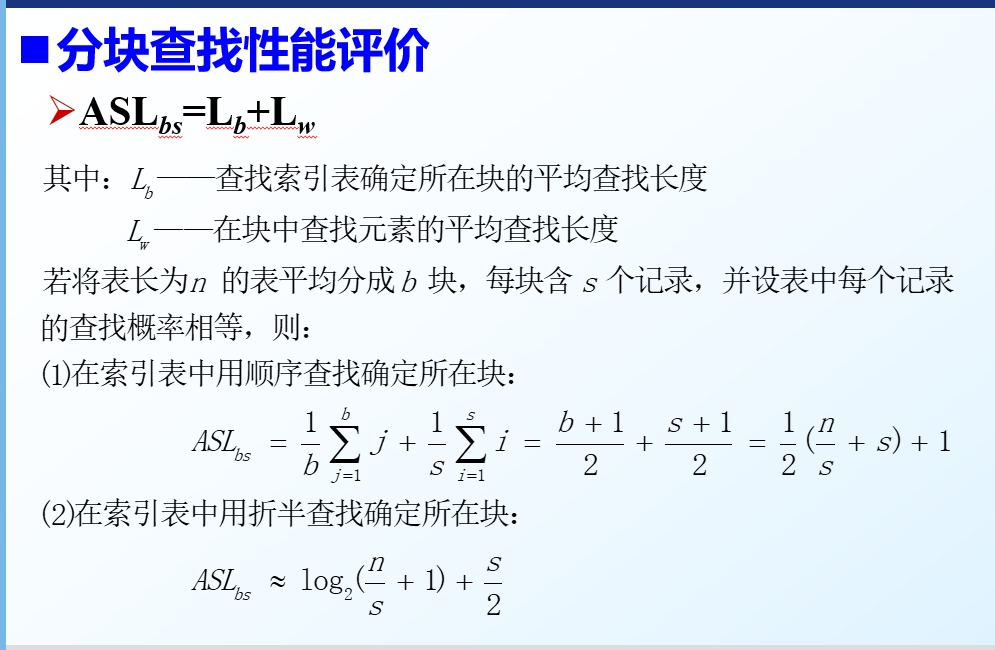
- 当对一个线性表R[60]进行索引顺序查找(分块查找)时,若共分成了10个子表,每个子表有6个表项。假定对索引表和数据子表都采用顺序查找,则查找每一个表项的平均查找长度为( 9 ) 。
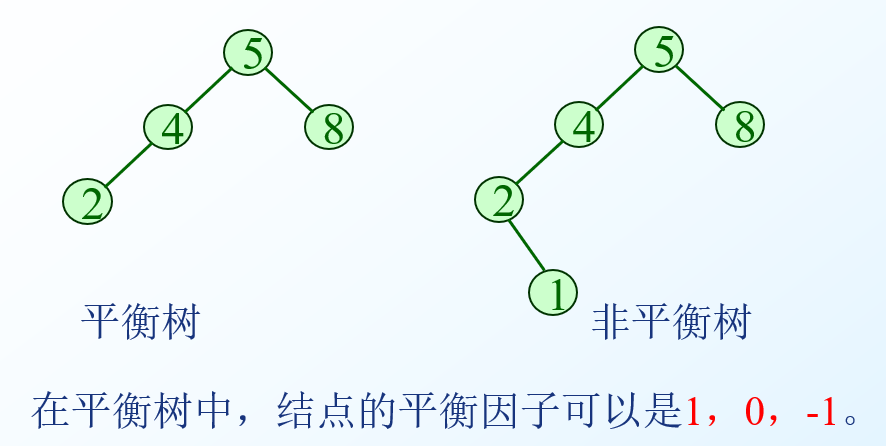
平衡二叉树
- 性质:任一结点的平衡因子只能取:-1、0 或 1;如果树中某个结点的平衡因子的绝对值大于1,则这棵二叉树就失去平衡,不再是AVL树
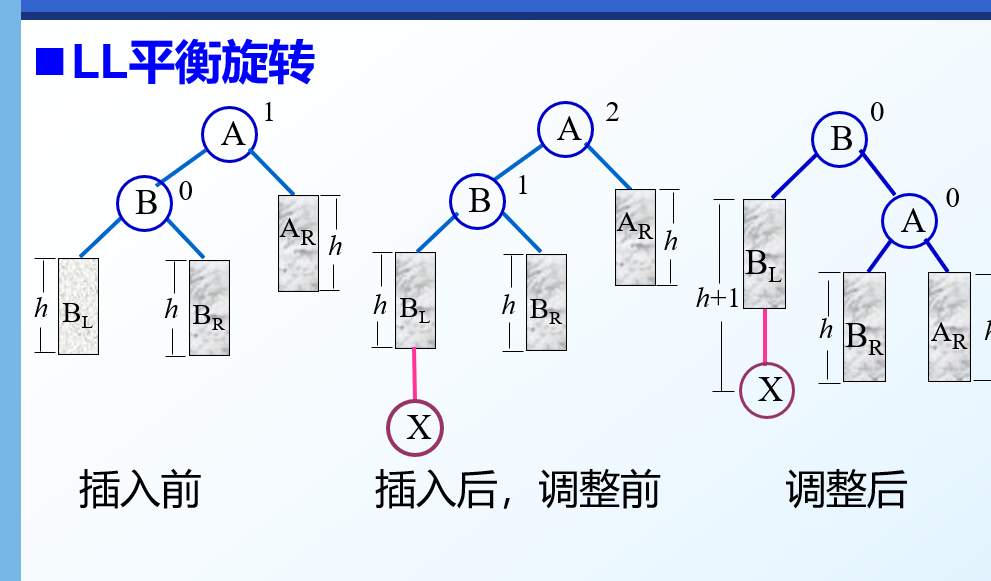
LL型(右旋转)
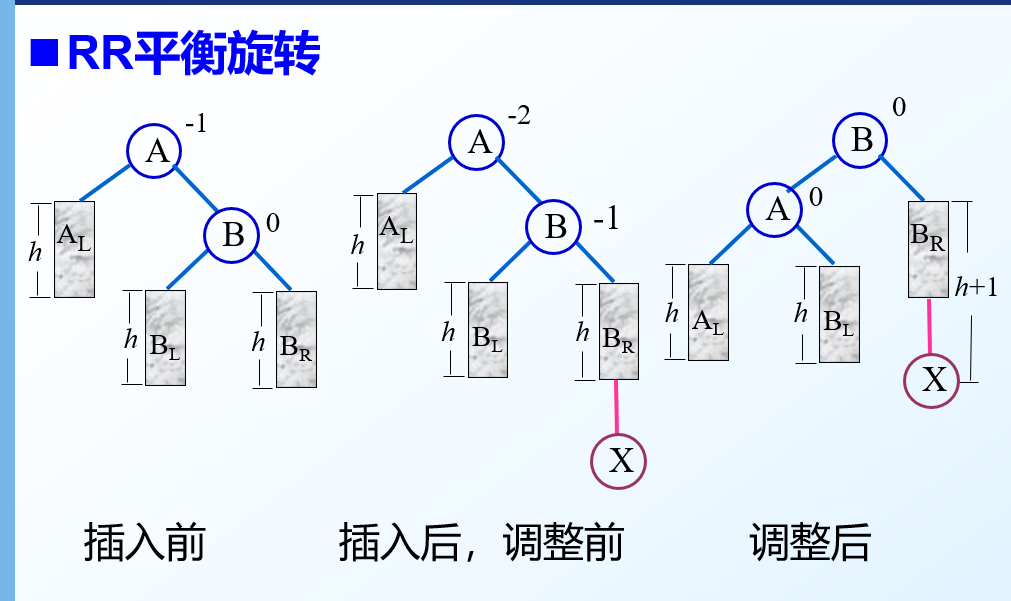
RR型(左旋转)
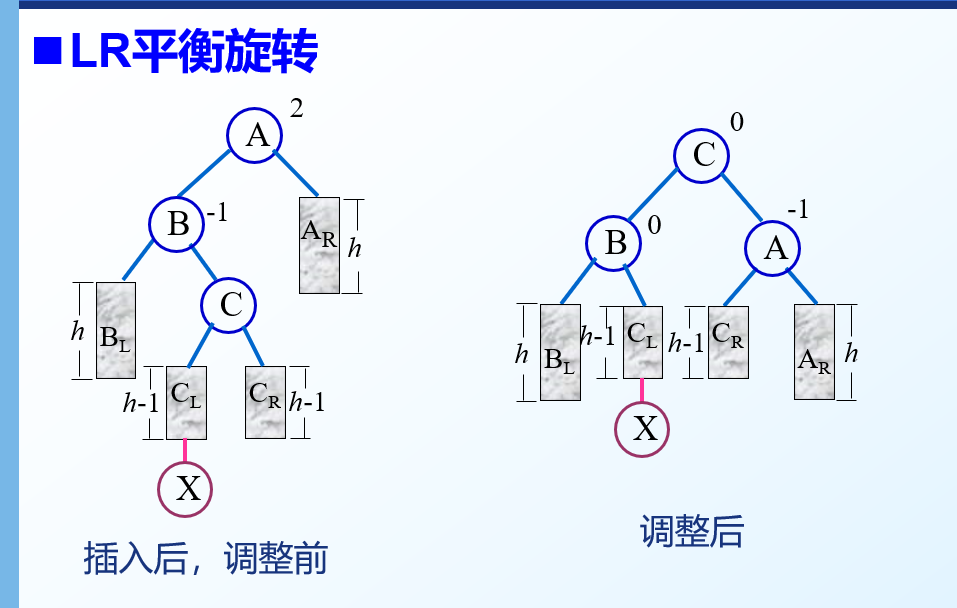
LR型
- 先进行一次左旋转变成LL型,再进行一次右旋转
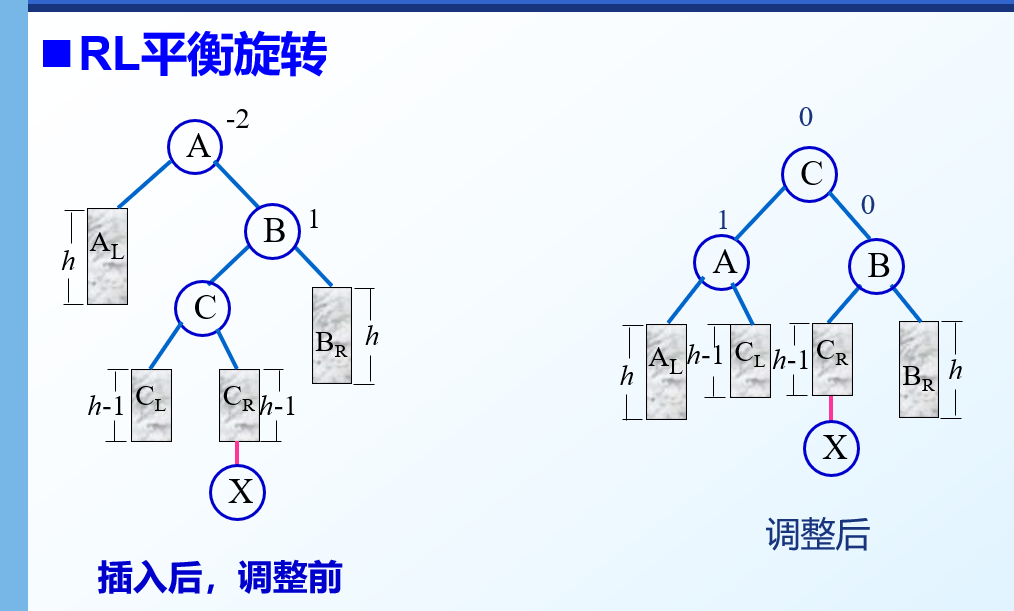
RL型
- 先进行一次右旋转变成RR型,再进行一次左旋转
散列表
散列函数构造方法:
- 数字分析法
- 平方取中法
- 折叠法
- 除留余数法
处理冲突
处理冲突的方法:
- 开放定址法
- 再散列法
- 链地址法
- 建立一个公共溢出区
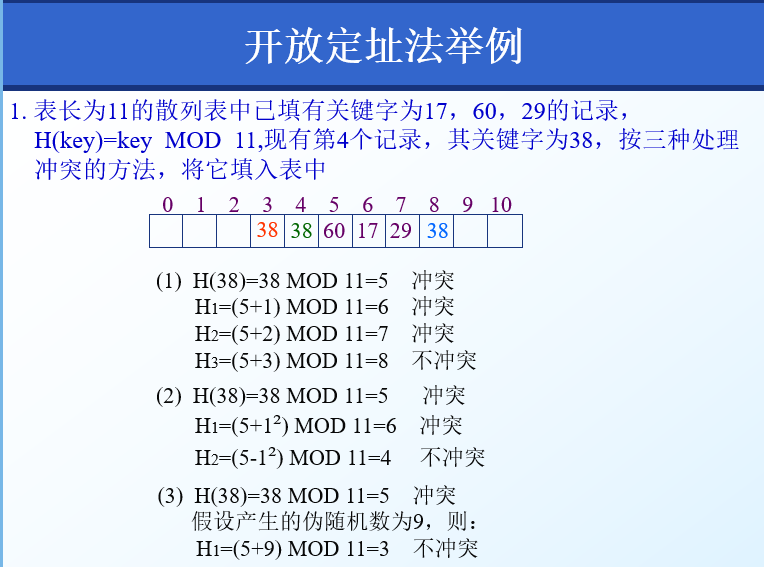
开放定址法:
方法:当冲突发生时,形成一个探查序列;沿此序列逐个地址探查,直到找到一个空位置(开放的地址),将发生冲突的记录放到该地址中,即Hi=(H(key)+di)MOD m, i=1,2,…,k(k <=m-1)
H(key)—散列函数,m —散列表表长,di —增量序列
分类
线性探测再散列: di =1,2,3,…,m-1
二次探测再散列: di =1²,-1²,2²,-2²,3²,…,±k²(k<=m/2)
伪随机探测再散列: di =伪随机数序列
再散列法:
方法:构造若干个散列函数,当发生冲突时,计算下一个散列地址,即:Hi=RHi(key) i=1,2,…,k
RHi—不同的散列函数
特点:计算时间增加
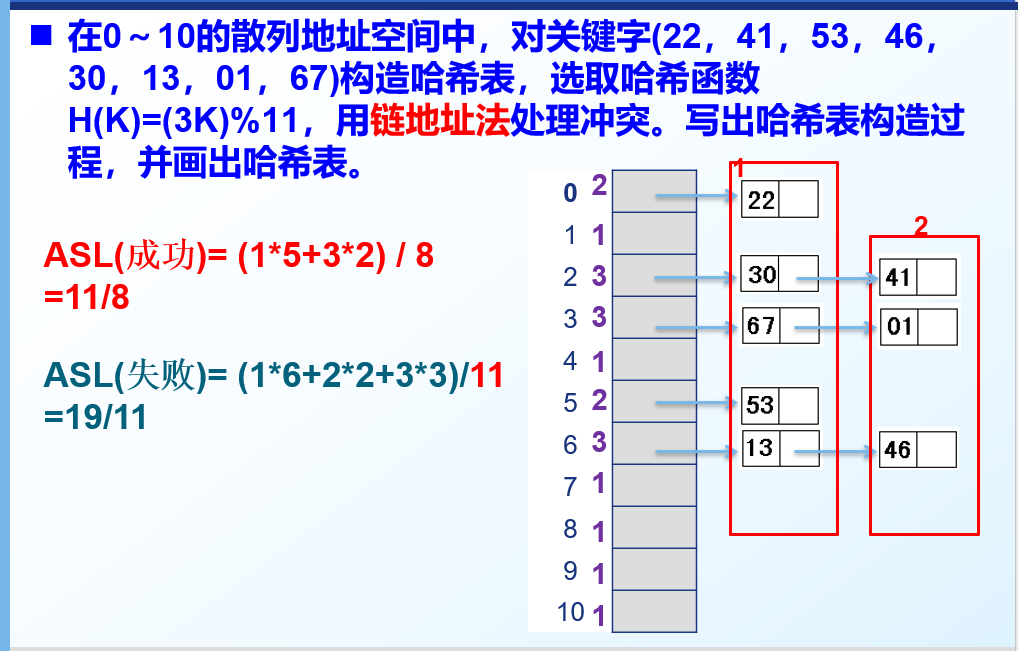
链地址法:
方法:将所有关键字为同义词的记录存储在一个单链表中,并用一维数组存放头指针
建立一个公共溢出区:
除设立散列基本表外,另设立一个溢出向量表。所有关键字和基本表中关键字为同义词的记录,不管它们由散列函数得到的地址是什么,一旦发生冲突,都填入溢出表。
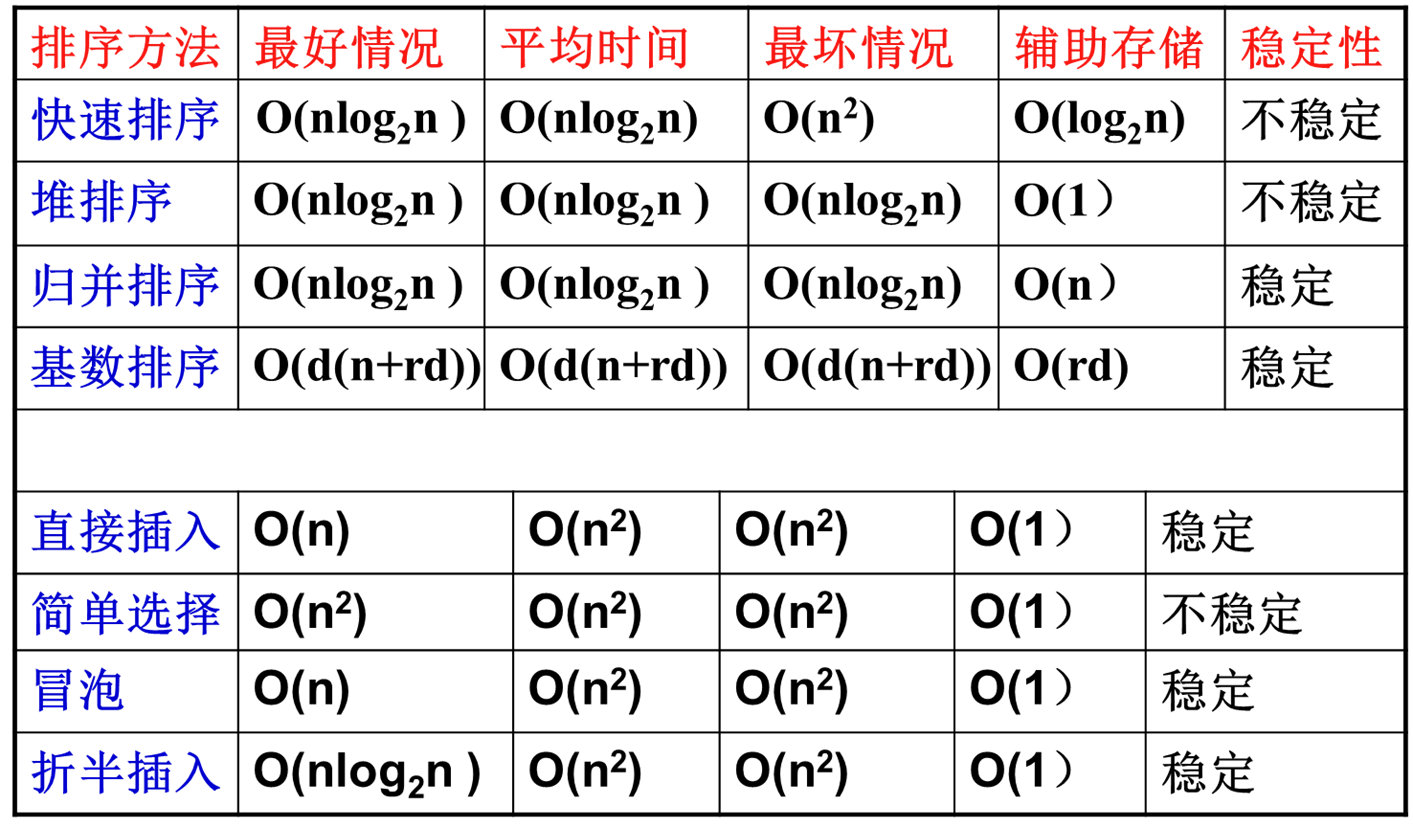
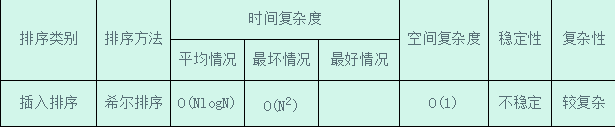
第八章 排序



















 339
339

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











