




目录
3. Instance Normalization (IN)
5. Root Mean Square Normalization(RMSNorm)
4. Leaky Relu / PeLU (α不可学习 / 可学习)
6. AdamW(Adam + Weight Decay)
3. BCE Loss(二元交叉熵,Binary Cross-Entropy)
4. CE Loss(多元交叉熵 / 交叉熵,Cross-Entropy)
5. KL散度(Kullback-Leibler Divergence)
1. Self Attention 与 Cross Attention
2. 双向Attention 与 Casual Attention
3. Sclaed Dot-Product Attention 与 Multi-Head Attention(MHA)
4. 分组查询注意力(Grouped-Query Attention, GQA)
5. 多层注意力(Multi-Level Attention, MLA)
6. 多查询注意力(Multi-Query Attention, MQA)
前言
一、归一化:Layer Normalization (LN)、Batch Normalization (BN)、Instance Normalization (IN)、Group Normalization (GN)、Root Mean Square Normalization(RMSNorm);
二、激活函数:sigmoid,Tanh,ReLU,Leaky ReLU,Softmax;
三、优化器:SGD,BGD,MBGD-Mini-batch GD,Momentum,Adam,AdamW;
四、损失函数:L1 Loss(MAE),L2 Loss(MSE),BCE Loss(二元交叉熵,Binary Cross-Entropy),交叉熵(多元交叉熵,Cross-Entropy),KL散度(Kullback-Leibler Divergence),Focal Loss(二分类,类别不平衡),InfoNCE Loss;
五、注意力机制:Self Attention 与 Cross Attention,双向Attention 与 Casual Attention,Scaled Dot-Product Attention 与 Multi-Head Attention(MHA),分组查询注意力(GQA),多层注意力(MLA),多查询注意力(MQA);
六、位置编码:绝对位置编码(正余弦位置编码),旋转位置编码(ROPE),相对位置编码(PRE),RoPE(文本)+ 2D RPE(视觉);
七、Decoder解码:Greedy Search,Beam-Search,Temperature Sampling,Top-k Sampling,Top-p Sampling;
八、NLP、CV、AIGC、MLLMs经典算法
一、归一化
1. Layer Normalization (LN)
输入:(N, L, D);
计算:N不变,对每个样本上的(L, D)求总体均值和方差;
### 输入:(batch_size, seq_len, feature_dim)(常见于序列模型Transformer/RNN)
def layernorm(x, gamma, beta, eps=1e-5):
# x shape: (N, L, D)
N = x.shape[0]
mean = np.mean(x, axis=(1, 2)).reshape(N, 1, 1) # (N, 1, 1)
var = np.var(x, axis=(1, 2)).reshape(N, 1, 1) # (N, 1, 1)
x_normalized = (x - mean) / np.sqrt(var + eps) # 归一化
return gamma * x_normalized + beta
### e.g. x形状为 (2, 3, 4)(batch_size=2, seq_len=3, feature_dim=4)
x = [
[ # 样本 1
[1, 2, 3, 4], # seq_len1
[5, 6, 7, 8], # seq_len2
[9, 10, 11, 12] # seq_len3
],
[ # 样本 2
[-1, -2, -3, -4], # seq_len1
[-5, -6, -7, -8], # seq_len2
[-9, -10, -11, -12] # seq_len3
]
]
x = np.array(x)
gamma, beta = 0.1, 0.1
x_ln = layernorm(x, gamma, beta, eps=1e-5)
print(x_ln.shape)
"""
LN 计算:对样本1归一化:计算所有时间步和特征的均值
mean = (1+2+...+12) / 12 = 6.5
var = (1²+2²+...+12²)/12 - mean² = 11.9167
样本2同理(每个样本独立计算)。
"""-
Adaptive LayerNorm:对传统 LayerNorm 的增强,通过引入可学习的缩放(γ)和偏移(β)参数,使得归一化过程能够根据输入数据的不同进行调整,从而提高了模型的灵活性和表现。这种方法尤其适用于多任务学习和多模态学习等复杂任务,可以更好地适应不同的数据分布,提高训练的稳定性和效率。
![]()
class AdaptiveLayerNorm(nn.Module):
def __init__(self, input_dim):
super(AdaptiveLayerNorm, self).__init__()
# 可学习的缩放和偏移参数
self.gamma = nn.Parameter(torch.ones(input_dim))
self.beta = nn.Parameter(torch.zeros(input_dim))
def forward(self, x):
# 计算均值和方差
mean = x.mean(dim=-1, keepdim=True)
var = x.var(dim=-1, keepdim=True, unbiased=False)
# 归一化
x_norm = (x - mean) / torch.sqrt(var + 1e-5)
# 自适应缩放和偏移
return self.gamma * x_norm + self.beta2. Batch Normalization (BN)
输入:(N, C, H, W);
计算:C不变,对每个C上的(N, H, W)求总体均值和方差;

# 输入x:(batch_size, channels, height, width)(常见于CNN)
def batchnorm(x, gamma, beta, eps=1e-5):
# x shape: (N, C, H, W)
c = x.shape[1]
mean = np.mean(x, axis=(0, 2, 3)).reshape(1,c,1,1) # 计算每个通道的均值,维度 (1,C,1,1)
var = np.var(x, axis=(0, 2, 3)).reshape(1,c,1,1) # 计算每个通道的方差,维度 (1,C,1,1)
x_normalized = (x - mean) / np.sqrt(var + eps) # 归一化
return gamma * x_normalized + beta # 缩放和偏移
# e.g. x形状为 (2, 3, 2, 2)(batch_size=2, channels=3, height=2, width=2)
x = [
[ # 样本 1
[[1, 2], [3, 4]], # 通道 1
[[5, 6], [7, 8]], # 通道 2
[[9, 10], [11, 12]] # 通道 3
],
[ # 样本 2
[[-1, -2], [-3, -4]], # 通道 1
[[-5, -6], [-7, -8]], # 通道 2
[[-9, -10], [-11, -12]] # 通道 3
]
]
x = np.array(x)
gamma, beta = 0.1, 0.1
x_bn = batchnorm(x, gamma, beta, eps=1e-5)
print(x_bn.shape)
"""
对通道1归一化:计算所有样本和空间位置的均值.
mean = (1+2+3+4 + (-1-2-3-4)) / 8 = 0
var = (1²+2²+...+(-4)²)/8 - mean² = 7.5
其他通道类似(每个通道独立计算)。
"""3. Instance Normalization (IN)
输入:(N, C, H, W);
计算:(N, C)不变,对每个(N, C)上的(H, W)求总体均值和方差;
def instance_norm(x, gamma, beta, eps=1e-5):
# x shape: (N, C, H, W)
N, C = x.shape[0], x.shape[1]
mean = np.mean(x, axis=(2, 3)).reshape(N, C, 1, 1) # 计算每个样本每个通道的均值,维度 (N, C)
var = np.var(x, axis=(2, 3)).reshape(N, C, 1, 1) # 计算方差,维度 (N, C)
x_normalized = (x - mean) / np.sqrt(var + eps) # 归一化
return gamma * x_normalized + beta # 缩放和偏移
# 形状为 (2, 3, 2, 2)(batch=2, channels=3, height=2, width=2):
x = [
[ # 样本 1
[[1, 2], [3, 4]], # 通道 1
[[5, 6], [7, 8]], # 通道 2
[[9, 10], [11, 12]] # 通道 3
],
[ # 样本 2
[[-1, -2], [-3, -4]], # 通道 1
[[-5, -6], [-7, -8]], # 通道 2
[[-9, -10], [-11, -12]] # 通道 3
]
]
x = np.array(x)
gamma, beta = 0.1, 0.1
x_in = instance_norm(x, gamma, beta, eps=1e-5)
print(x_in.shape)
"""
对样本1的通道1归一化:
mean = (1+2+3+4)/4 = 2.5
var = [(1-2.5)² + (2-2.5)² + (3-2.5)² + (4-2.5)²]/4 = 1.25
其他通道和样本同理(每个样本的每个通道独立计算)。
"""4. Group Normalization (GN)
输入:(N, C, H, W), group nums=G;
输出:(N, C, H, W) --> (N, G, C//G, H, W) --> (N, C, H, W)
计算:(N, G)不变,对每个(N, G)上的(C//G, H, W)求总体均值和方差;
# 核心思想:将通道分组,对每个样本的每组通道归一化,解决小 batch 下 BN 不稳定的问题,适用于检测、分割等任务。
def group_norm(x, gamma, beta, G, eps=1e-5):
# x shape: (N, C, H, W) 或 (N, C, L)
# G: 分组数(如 C=32, G=8 → 每组 4 个通道)
N, C, H, W = x.shape[0], x.shape[1], x.shape[2], x.shape[3]
x = np.reshape(x, (N, G, C//G, H, W)) # 分组后形状 (N, G, C/G, H, W)
mean = np.mean(x, axis=(2, 3, 4)).reshape(N, G) # 计算每组均值,维度 (N, G)
var = np.var(x, axis=(2, 3, 4)).reshape(N, G) # 计算每组方差,维度 (N, G)
x_normalized = (x - mean) / np.sqrt(var + eps) # 归一化
x_normalized = np.reshape(x_normalized, (N, C, H, W)) # 恢复原始形状
return gamma * x_normalized + beta # 缩放和偏移
# x形状为 (2, 4, 2, 2)(batch=2, channels=4, height=2, width=2),分组数 G=2
x = [
[ # 样本 1
[[1, 2], [3, 4]], # 通道 1 (组 1)
[[5, 6], [7, 8]], # 通道 2 (组 1)
[[9, 10], [11, 12]], # 通道 3 (组 2)
[[13, 14], [15, 16]] # 通道 4 (组 2)
],
[ # 样本 2
[[-1, -2], [-3, -4]], # 通道 1 (组 1)
[[-5, -6], [-7, -8]], # 通道 2 (组 1)
[[-9, -10], [-11, -12]], # 通道 3 (组 2)
[[-13, -14], [-15, -16]] # 通道 4 (组 2)
]
]
x = np.array(x)
gamma, beta = 0.1, 0.1
x_gn = group_norm(x, gamma, beta, G=2, eps=1e-5)
print(x_gn.shape)
"""
GN 计算(G=2,每组 2 个通道):
对样本 1 的组 1(通道 1+2)归一化:
mean = (1+2+3+4 + 5+6+7+8)/8 = 4.5
var = [(1-4.5)² + ... + (8-4.5)²]/8 = 5.25
组 2(通道 3+4)和其他样本同理。
"""5. Root Mean Square Normalization(RMSNorm)
传统LN计算均值和方差;RMSNorm去除均值中心化,仅使用均方根RMS进行缩放。避免减法,提高数值稳定性,简化计算;仅使用均方根RMS归一化,计算量更小。只对特征维度(feature_dim)计算。

# (batch_size, seq_len, feature_dim)
def rms_norm(x, gamma, eps=1e-5):
rms = np.sqrt(np.mean(x**2, axis=-1, keepdims=True)) # 只在特征维度(D)计算
return gamma * x / (rms + eps)
# x形状为 (2, 3, 4)
x = [
[[1, 2, 3, 4], [5, 6, 7, 8], [9, 10, 11, 12]], # 样本1
[[-1, -2, -3, -4], [-5, -6, -7, -8], [-9, -10, -11, -12]] # 样本2
]
x = np.array(x)
gamma = 1.0
x_rms = rms_norm(x, gamma, eps=1e-5)
print(x_rms.shape)
"""
对样本1的第一个时间步 [1, 2, 3, 4] 计算:
RMS = sqrt(1**2 + 2**2 + 3**2 + 4**2)/4 = sqrt(7.5) ≈ 2.7386
归一化后:
[1,2,3,4]/2.7386 ≈ [0.3651,0.7303,1.0954,1.4606]
最终输出(γ=1):与归一化值相同。
"""| 方法 | 归一化维度 | 依赖 Batch | 适用场景 | python实现 |
|---|---|---|---|---|
| Layer Norm (LN) | (C, H, W) 或 (L, D) | 否 | Transformer/RNN | torch.nn.LayerNorm() |
| Batch Norm (BN) | (N, H, W) | 是 | CNN(大 batch) | torch.nn.BatchNorm2d() |
| Instance Norm (IN) | (H, W)(单样本单通道) | 否 | 风格迁移、图像生成 | torch.nn.InstanceNorm2d() |
| Group Norm (GN) | (G, C//G, H, W) | 否 | 小 batch 检测/分割(如 Mask R-CNN) | torch.nn.GroupNorm() |
| 归一化 | 公式 | 计算量 | 适用场景 |
| LN | (x−μ)/σ * γ | 较高(需均值) | RNN/Transformer序列模型 |
| BN | (x−μ)/σ * γ | 高(依赖batch,需维护running mean/var) | CNN、CV任务 |
| RMSNorm | x/RMS * γ | 较低 | 大模型(如LLaMA) |
二、激活函数
激活函数实际是神经网络中的一种非线性变换,使神经网络能够捕捉到非线性关系,从而更好地逼近复杂的函数或映射。
大模型常用的激活函数包括ReLU、Leaky ReLU、ELU、Swish和GELU。ReLU计算简单且有效避免梯度消失问题,加快训练速度,但可能导致神经元死亡;Leaky ReLU通过引入小斜率缓解ReLU的缺点;GeLU一种改进的ReLU函数,可以提供更好的性能和泛化能力;Swish一种自门控激活函数,可以提供非线性变换,并具有平滑和非单调的特性,在平滑性和性能上表现优异,但计算开销较大。
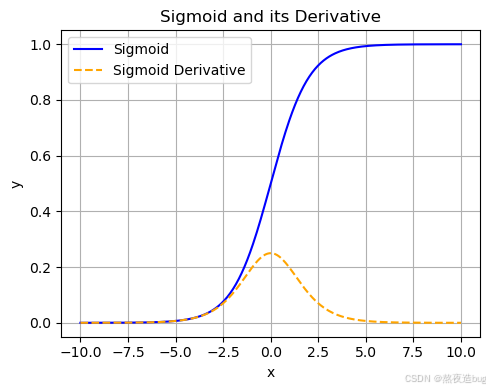
1. Sigmoid激活函数(二分类)
- 特点:输出范围(0,1),适合二分类输出层,但易导致梯度消失。
import numpy as np
import matplotlib.pyplot as plt
def sigmoid(x):
return 1 / (1 + np.exp(-x))
x = np.linspace(-5, 5, 100)
y = sigmoid(x)
plt.plot(x, y)
plt.title("Sigmoid")
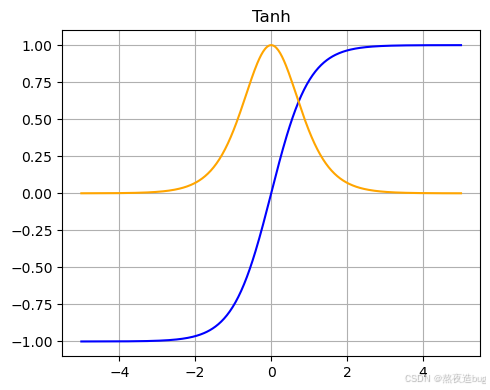
plt.show()2. Tanh激活函数
- 输出范围(-1,1),梯度比Sigmoid更强,但仍存在梯度消失。
import numpy as np
import matplotlib.pyplot as plt
def relu(x):
return np.maximum(0, x)
x = np.linspace(-5, 5, 100)
y = relu(x)
plt.plot(x, y)
plt.title("ReLU")
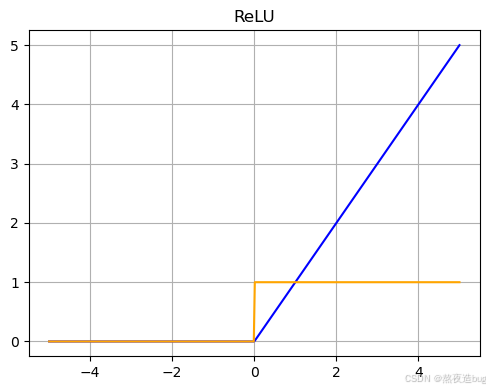
plt.show()3. ReLU
- 输出范围([0, +♾️),计算高效,缓解梯度消失,但可能导致“神经元死亡”(负输入梯度为0)。
import numpy as np
import matplotlib.pyplot as plt
def relu(x):
return np.maximum(0, x)
x = np.linspace(-5, 5, 100)
y = relu(x)
plt.plot(x, y)
plt.title("ReLU")
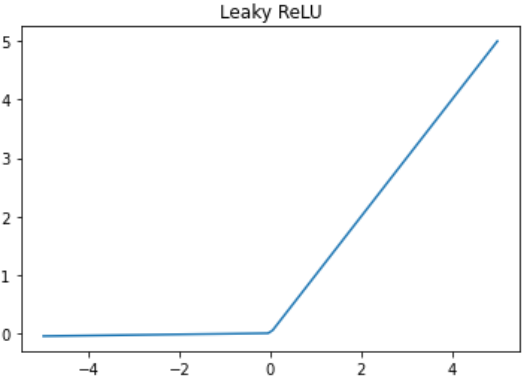
plt.show()4. Leaky Relu / PeLU (α不可学习 / 可学习)
- 输出范围(-♾️, +♾️),引入小的负斜率(α),缓解“神经元死亡”问题。
import numpy as np
import matplotlib.pyplot as plt
def leaky_relu(x, alpha=0.01):
return np.where(x >= 0, x, alpha * x)
x = np.linspace(-5, 5, 100)
y = leaky_relu(x)
plt.plot(x, y)
plt.title("Leaky ReLU")
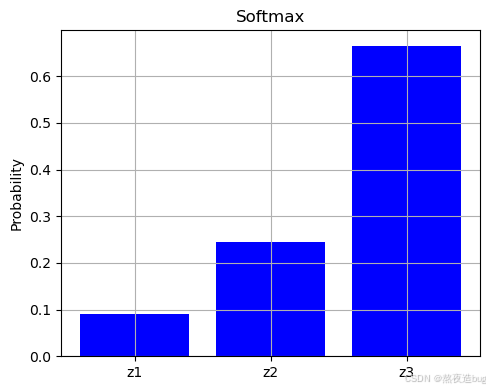
plt.show()5. Softmax激活函数(多分类)
- 将输出转化为概率分布,适用于多分类输出层。
import numpy as np
import matplotlib.pyplot as plt
def softmax(x):
exp_x = np.exp(x - np.max(x)) # 防溢出
return exp_x / np.sum(exp_x, axis=0)
x = np.array([1.0, 2.0, 3.0])
print(softmax(x)) # 输出: [0.09003057 0.24472847 0.66524096]
"""
np.exp(x - np.max(x))通过减去输入向量x的最大值(x - np.max(x)),
可以保证:所有指数部分的输入(xi−max(x))≤0,因此exi−max(x)的范围是(0,1],
避免exi的爆炸性增长,同时不改变softmax的输出结果。
(数学上等价:分子分母同时除以np.exp(max(x)),和原来等价)。
"""三、优化器
| 优化器分类 | 优化器 | 核心思想 | 优点 | 缺点 |
| 基础梯度下降类 | BGD | 全批量梯度更新 | 稳定收敛 | 计算成本高 |
| SGD | 单样本随机更新 | 计算快 | 噪声大 | |
| MBGD | 小批量梯度更新 | 平衡速度与稳定性 | 需调批量大小 | |
| 动量类 | Momentum | 历史梯度加权平均 | 加速收敛,减少震荡 | 需调动量系数 |
| 自适应学习率类 | Adam | 自适应动量 + 学习率 | 适合大多数场景 | 内存占用高 |
| AdamW | Adam + 权重衰减 | 更稳定的权重衰减 | 超参更多 |
1. SGD
目标:每次迭代随机选择一个样本计算梯度,更新参数。更新公式如下,其中 (xi,yi) 是随机选择的样本。
特点:计算快,但噪声大,收敛不稳定。
![]()
2. BGD
目标:在每次迭代中使用全部训练样本计算损失函数的梯度,更新参数。更新公式如下,其中,η是学习率,∇θJ(θ)是损失函数J对参数θ的梯度(所有样本的平均梯度)。
特点:全局最优解,但计算成本高,不适合大规模数据。
![]()
3. MBGD-Mini-batch GD
目标:每次迭代使用一个小批量(Mini-batch)样本计算梯度。更新公式如下,其中,m是批量大小。
特点:平衡了BGD的稳定性和SGD的速度。

4. Momentum
目标:引入动量项(指数加权平均梯度)加速收敛,减少震荡。更新公式如下,其中,β是动量系数(通常0.9)。
推导:动量本质是对历史梯度的加权平均,帮助参数在梯度方向一致时加速,不一致时减速。
5. Adam
目标:结合动量(一阶矩)和自适应学习率(二阶矩)。
特点:收敛快。主流选择,适用于大多数任务。
![]()
![]()
6. AdamW(Adam + Weight Decay)
改进点:将权重衰减(L2正则化)从梯度更新中解耦,直接加到参数上。更新公式如下,其中,λ是权重衰减系数。
特点:Adam的权重衰减会因自适应学习率被缩放,AdamW则直接应用衰减,更稳定。
四、损失函数
1. L1 Loss(MAE)
- 原理:预测值与真实值的绝对误差,对异常值不敏感(鲁棒性强);
- 公式
import numpy as np
def l1_loss(y_true, y_pred):
return np.mean(np.abs(y_true - y_pred))
y_true, y_pred = 1.0, 0.9
print(round(l1_loss(y_true, y_pred), 4))2. L2 Loss(MSE)
- 原理:计算预测值与真实值的平方误差,对异常值敏感(放大误差);
- 公式
import numpy as np
def l2_loss(y_true, y_pred):
return np.mean((y_true - y_pred) ** 2)
y_true, y_pred = 1.0, 0.9
print('l2 loss(mse): ', round(l2_loss(y_true, y_pred), 4))3. BCE Loss(二元交叉熵,Binary Cross-Entropy)
- 原理:二分类任务的交叉熵,输出通过Sigmoid压缩到[0,1]概率;
- 公式

# BCE Loss二元交叉熵(二分类)
def binary_cross_entropy(y_true, y_pred, epsilon=1e-7):
"""
y_true : 真实标签0或1
y_pred : 预测概率,经过Sigmoid)后的概率分布
epsilon : 极小值,防止log(0)数值错误
"""
y_pred = np.clip(y_pred, epsilon, 1 - epsilon)
return -np.mean(y_true * np.log(y_pred) + (1 - y_true) * np.log(1 - y_pred))
y_true = np.array([1, 1, 0]) # 真实值/label: 1, 1, 0
y_pred = np.array([0.9, 0.8, 0.6]) # 预测的概率分布: 0.9(1), 0.8(1), 0.6(1),最后一个预测错误
print("bce Loss:", round(binary_cross_entropy(y_true, y_pred), 4))
"""
np.clip(y_pred, epsilon, 1 - epsilon)
(1) 防止数值不稳定,通过clip将y_pred限制在[eps, 1-eps]内;
(2)避免梯度消失或爆炸。
"""4. CE Loss(多元交叉熵 / 交叉熵,Cross-Entropy)
- 原理:衡量预测概率分布与真实分布的差异,用于多分类任务,输出通过Softmax压缩到概率分布。
- 公式(多分类)
# CE Loss多元交叉熵/交叉熵(多分类)
def cross_entropy(y_true, y_pred, eps=1e-15):
"""
y_true : 真实标签0或1
y_pred : 预测概率,经过Sigmoid)后的概率分布
epsilon : 极小值,防止log(0)数值错误
"""
y_pred = np.clip(y_pred, eps, 1 - eps)
return -np.mean(np.sum(y_true * np.log(y_pred), axis=1))
y_true = np.array([
[1, 0, 0], # Class 0
[0, 1, 0], # Class 1
[0, 0, 1], # Class 2
[0, 1, 0] # Class 1
])
# 预测的概率分布,输出经过softmax转为概率分布
y_pred = np.array([
[0.7, 0.2, 0.1], # class 0
[0.1, 0.6, 0.3], # class 1
[0.2, 0.3, 0.5], # class 2
[0.4, 0.5, 0.1] # class 1
])
print('cross_entropy交叉熵: ', round(cross_entropy(y_true, y_pred), 4))
"""
np.clip(y_pred, eps, 1 - eps)
(1)防止数值不稳定,通过clip将y_pred限制在[eps, 1-eps]内;
(2)避免梯度消失或爆炸。
"""5. KL散度(Kullback-Leibler Divergence)
- 原理:衡量两个概率分布 P 和 Q 之间的差异,非对称且非负;
- 公式
import numpy as np
def kl_divergence(p, q):
p = np.clip(p, 1e-10, 1) # # 避免log(0)的情况;保证数值稳定;防止梯度消失和梯度爆炸
q = np.clip(q, 1e-10, 1)
return np.sum(p * np.log(p / q))
# 示例
p = np.array([0.1, 0.4, 0.5])
q = np.array([0.3, 0.3, 0.4])
print("KL Divergence: ", round(kl_divergence(p, q), 4))6. Focal Loss(二分类,类别不平衡)
- 原理:解决不平衡的二类别问题,输出通过Sigmoid压缩到[0,1]概率。通过权重α和聚焦参数γ,减少易分类样本的损失贡献,解决类别不平衡问题。
- 公式(二分类)

import numpy as np
def focal_loss(y_true, y_pred, alpha=0.25, gamma=2.0):
y_pred = np.clip(y_pred, 1e-8, 1 - 1e-8)
loss = -alpha * (1 - y_pred) ** gamma * (y_true * np.log(y_pred) + (1 - y_true) * np.log(1 - y_pred))
return np.mean(loss)
y_true = np.array([1, 0, 1, 0, 1]) # 真实二类别标签
y_pred = np.array([0.9, 0.1, 0.8, 0.2, 0.7]) # 预测概率分布0.9(1), 0.1(0), 0.8(1), 0.2(0), 0.7(1)
loss = focal_loss(y_true, y_pred)
print(f"Focal Loss: ", round(loss, 4))7. InfoNCE Loss
- 原理:对比学习中的损失函数,最大化正样本对的相似度,最小化负样本对的相似度;
- 公式:其中τ是温度系数。
![]()
import torch
import torch.nn as nn
import torch.nn.functional as F
import numpy as np
np.random.seed(42)
torch.manual_seed(42)
# PyTorch 实现
def infonce_loss_torch(query, positive_key, negative_keys, temperature=1.0):
"""
Args:
query: (batch_size, embedding_size)
positive_key: (batch_size, embedding_size)
negative_keys:(num_negative, embedding_size)
"""
positive_logits = torch.sum(query * positive_key, dim=1, keepdim=True) # (batch_size, 1)
negative_logits = torch.matmul(query, negative_keys.t()) # (batch_size, num_negative)
logits = torch.cat([positive_logits, negative_logits], dim=1) # (batch_size, 1 + num_negative)
# Compute cross-entropy loss (positive sample is at index 0)
labels = torch.zeros(query.size(0), dtype=torch.long, device=query.device)
loss = F.cross_entropy(logits / temperature , labels)
return loss
# Numpy 实现
def infonce_loss_numpy(query, positive_key, negative_keys, temperature=1.0):
"""
Args:
query: (batch_size, embedding_size)
positive_key: (batch_size, embedding_size)
negative_keys:(num_negative, embedding_size)
"""
positive_logits = np.sum(query * positive_key, axis=1, keepdims=True) / temperature # (batch_size, 1)
negative_logits = np.dot(query, negative_keys.T) / temperature # (batch_size, num_negative)
logits = np.concatenate([positive_logits, negative_logits], axis=1) # (batch_size, 1 + num_negative)
labels = np.zeros(query.shape[0], dtype=np.int64) # positive sample is at index 0
exp_logits = np.exp(logits - np.max(logits, axis=1, keepdims=True)) # numerical stability
softmax_probs = exp_logits / np.sum(exp_logits, axis=1, keepdims=True)
loss = -np.mean(np.log(softmax_probs[:, 0] + 1e-8)) # avoid log(0)
return loss
# 定义参数,生成随机数据
batch_size, num_negative, embedding_size = 32, 36, 512
query = np.random.randn(batch_size, embedding_size)
positive_key = np.random.randn(batch_size, embedding_size)
negative_keys = np.random.randn(num_negative, embedding_size)
# 归一化
query = query / np.linalg.norm(query, axis=1, keepdims=True)
positive_key = positive_key / np.linalg.norm(positive_key, axis=1, keepdims=True)
negative_keys = negative_keys / np.linalg.norm(negative_keys, axis=1, keepdims=True)
query_torch = torch.from_numpy(query)
positive_key_torch = torch.from_numpy(positive_key)
negative_keys_torch = torch.from_numpy(negative_keys)
loss_torch = infonce_loss_torch(query_torch, positive_key_torch, negative_keys_torch)
print(f"InfoNCE loss(PyTorch): {loss_torch.item():.4f}")
loss_numpy = infonce_loss_numpy(query, positive_key, negative_keys)
print(f"InfoNCE loss(Numpy): {loss_numpy: 4f}")五、注意力机制
| 类型 | Q/K/V来源 | 是否共享参数 | 典型应用 |
| Self Attention(手撕) | 同序列 | 否 | BERT文本编码 |
| Cross Attention | Q来自A序列,K/V来自B | 否 | 机器翻译、多模态 |
| 双向Attention | 全面捕捉上下文信息 | 是 | 需要全局理解的场景(BERT) |
| Causal Attention | 同序列+三角掩码 | 否 | GPT文本生成 |
| MHA(手撕) | 同序列,多组独立 | 否 | 通用Transformer |
| GQA | Q分组,组内共享K/V | 部分共享 | Llama 2等大模型 |
| MQA | 多Q,共享K/V | 是(K/V共享) | 轻量级模型推理 |
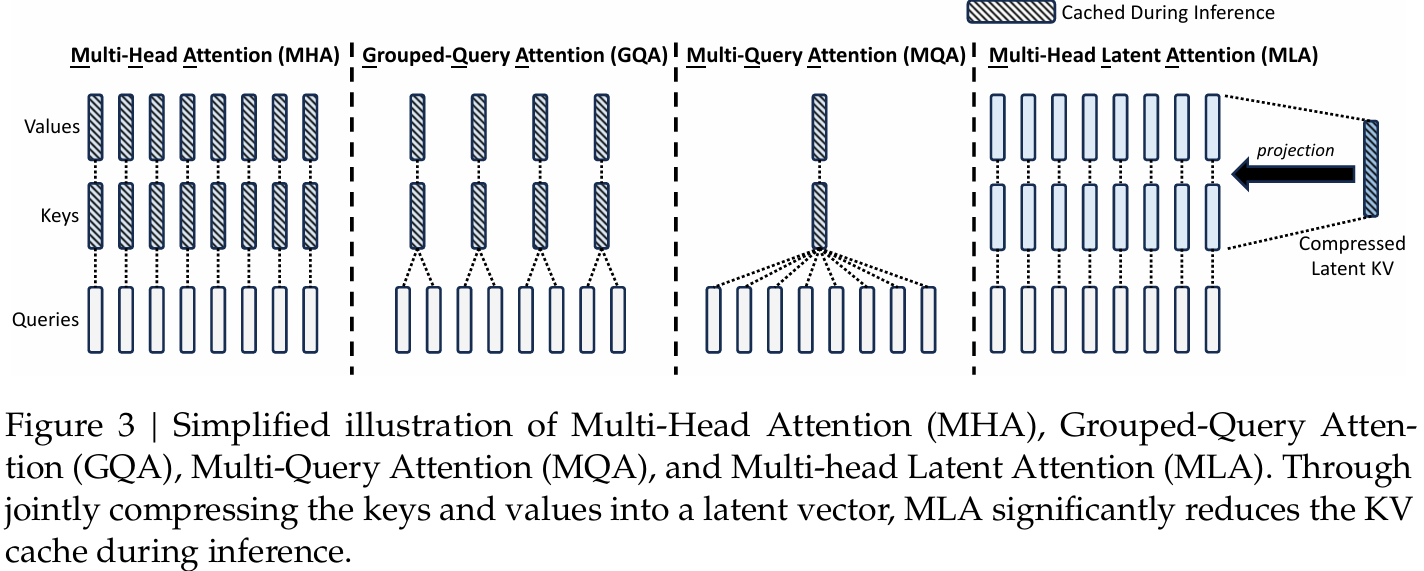
| MLA | 捕获不同粒度的特征 | 是 | 长文档处理、层次化结构建模(如Hierarchical Transformer) |
1. Self Attention 与 Cross Attention
- Self Attention
- 原理:计算序列中每个位置与其他位置的关联权重,生成上下文感知的表示。公式如,其中 Q,K,V 来自同一输入序列。
- 特点:捕捉序列内部依赖关系,无方向性限制。
- 应用:Transformer的核心组件,适用于文本/图像等序列数据(如BERT、ViT)。
![]()
- Cross Attention
- 原理:一个序列的Q与另一序列的K,V交互,例如解码器关注编码器输出。
- 特点:建立跨序列关系(如源语言到目标语言)。
- 应用:机器翻译(Seq2Seq)、多模态融合(文本-图像对齐)。
2. 双向Attention 与 Casual Attention
- 双向Attention
- 原理:自注意力的特例,允许每个位置同时关注前后文(无方向限制)。
- 特点:全面捕捉上下文信息。
- 应用:需要全局理解的场景(如BERT的预训练)。
- Casual Attention
- 原理:通过掩码限制当前位置仅关注之前的位置(未来信息不可见)。
- 特点:保证自回归生成的时序性。
- 应用:文本生成(如GPT)、自回归模型。
3. Sclaed Dot-Product Attention 与 Multi-Head Attention(MHA)
- Sclaed Dot-Product Attention(常考手撕)
![]()
import torch
import torch.nn as nn
import torch.nn.functional as F
import math
import numpy as np
np.random.seed(42)
torch.manual_seed(42)
class DotProductAttention(nn.Module):
def __init__(self, d_model):
super().__init__()
self.scale = math.sqrt(d_model)
def forward(self, q, k, v, mask=None):
scores = torch.matmul(q, k.transpose(-2, -1)) / self.scale
if mask is not None:
scores = scores.masked_fill(mask == 0, -1e9)
weights = F.softmax(scores, dim=-1)
output = torch.matmul(weights, v)
return output, weights
batch_size, seq_len, d_model = 4, 12, 512
attn = DotProductAttention(d_model)
q = torch.randn(batch_size, seq_len, d_model)
k = v = torch.randn(batch_size, seq_len, d_model) # 简单起见,k和v相同
output, weights = attn(q, k, v)
print(f"输入: q{k.shape}, k{k.shape}, v{v.shape}")
print(f"输出: {output.shape}, 权重形状: {weights.shape}")
print("第一个样本的注意力权重:\n", weights[0].detach().numpy().round(3))- Multi-Head Attention(MHA)
- 原理:将 Q,K,V 投影到多个子空间,并行计算多个自注意力头,拼接后融合如下,每个头关注不同方面的特征。
- 特点:增强模型捕捉多样化模式的能力。
- 应用:几乎所有Transformer变体(如GPT、BERT)。

- MHA手撕代码(常考手撕)
import torch
import torch.nn as nn
import torch.nn.functional as F
class MultiHeadAttention(nn.Module):
def __init__(self, dim, n_head, dropout=0.1):
super(MultiHeadAttention, self).__init__()
self.dim = dim
self.head_dim = dim // n_head
self.n_head = n_head
assert self.dim == self.head_dim * n_head
self.linear_q = nn.Linear(dim, dim)
self.linear_k = nn.Linear(dim, dim)
self.linear_v = nn.Linear(dim, dim)
self.dropout = nn.Dropout(dropout)
self.fc_out = nn.Linear(dim, dim)
def forward(self, x, mask=None):
b, t, d = x.size()
Q = self.linear_q(x)
K = self.linear_k(x)
V = self.linear_v(x)
# Reshape and transpose for multi-head attention
Q = Q.view(b, t, self.n_head, self.head_dim).transpose(1, 2)
K = K.view(b, t, self.n_head, self.head_dim).transpose(1, 2)
V = V.view(b, t, self.n_head, self.head_dim).transpose(1, 2)
# Scaled dot-product attention
score = torch.matmul(Q, K.transpose(2, 3)) / torch.sqrt(torch.tensor(self.head_dim, dtype=torch.float32))
# Apply mask (for decoder)
if mask is not None:
mask = mask.unsqueeze(1) # Add head dimension
score = score.masked_fill(mask == 0, -1e9)
# Softmax and dropout
score = F.softmax(score, dim=-1)
if self.dropout is not None:
score = self.dropout(score)
# Combine heads and project back to original dimension
output = torch.matmul(score, V).transpose(1, 2).contiguous().view(b, t, d)
output = self.fc_out(output)
return output
def generate_mask(len_seq):
"""生成下三角掩码矩阵(用于Decoder的自回归掩码)"""
return torch.tril(torch.ones(len_seq, len_seq)).bool()
# 示例用法
embed_dim = 512
num_heads = 8
model = MultiHeadAttention(embed_dim, num_heads)
x = torch.randn(16, 10, 512) # 输入形状: [batch_size, seq_len, dim]
mask = generate_mask(10).unsqueeze(0).expand(16, 10, 10) # 扩展掩码到batch维度
output = model(x, mask)
print(output.shape) # 输出: torch.Size([16, 10, 512])4. 分组查询注意力(Grouped-Query Attention, GQA)
- 原理:折中方案,将查询头分组,每组共享键和值头(介于MHA和MQA之间)。
- 特点:平衡计算效率和模型性能。
- 应用:大模型推理优化(如Llama 2的70B版本)。
import torch
import torch.nn as nn
import torch.nn.functional as F
class GroupedQueryAttention(nn.Module):
def __init__(self, dim, n_head, n_group=2, dropout=0.1):
super(GroupedQueryAttention, self).__init__()
self.dim = dim
self.head_dim = dim // n_head
self.n_head = n_head
self.n_group = n_group
assert n_head % n_group == 0, "n_head must be divisible by n_group"
assert self.dim == self.head_dim * n_head
# 分组参数
self.heads_per_group = n_head // n_group
# 投影层
self.linear_q = nn.Linear(dim, dim) # 每个头独立的Q
self.linear_k = nn.ModuleList([nn.Linear(dim, self.head_dim * self.heads_per_group) for _ in range(n_group)])
self.linear_v = nn.ModuleList([nn.Linear(dim, self.head_dim * self.heads_per_group) for _ in range(n_group)])
self.dropout = nn.Dropout(dropout)
self.fc_out = nn.Linear(dim, dim)
def forward(self, x, mask=None):
b, t, d = x.size()
# 投影Q (和MHA一样)
Q = self.linear_q(x).view(b, t, self.n_head, self.head_dim).transpose(1, 2) # [b, h, t, d_h]
# 分组处理K和V
K_list, V_list = [], []
for g in range(self.n_group):
# 获取当前组的头范围
start = g * self.heads_per_group
end = (g + 1) * self.heads_per_group
# 投影当前组的K和V
K_g = self.linear_k[g](x).view(b, t, self.heads_per_group, self.head_dim).transpose(1, 2) # [b, h_g, t, d_h]
V_g = self.linear_v[g](x).view(b, t, self.heads_per_group, self.head_dim).transpose(1, 2) # [b, h_g, t, d_h]
K_list.append(K_g)
V_list.append(V_g)
K = torch.cat(K_list, dim=1) # [b, h, t, d_h]
V = torch.cat(V_list, dim=1) # [b, h, t, d_h]
# 注意力计算
score = torch.matmul(Q, K.transpose(2, 3)) / torch.sqrt(torch.tensor(self.head_dim, dtype=torch.float32))
if mask is not None:
mask = mask.unsqueeze(1) # 添加头维度
score = score.masked_fill(mask == 0, -1e9)
score = F.softmax(score, dim=-1)
if self.dropout is not None:
score = self.dropout(score)
output = torch.matmul(score, V).transpose(1, 2).contiguous().view(b, t, d)
output = self.fc_out(output)
return output
def generate_mask(len_seq):
"""生成下三角掩码矩阵(用于Decoder的自回归掩码)"""
return torch.tril(torch.ones(len_seq, len_seq)).bool()
# 测试代码
batch_size, num_heads, seq_len, embed_dim = 16, 8, 10, 512
x = torch.randn(batch_size, seq_len, embed_dim)
mask = generate_mask(seq_len).unsqueeze(0).expand(batch_size, seq_len, seq_len)
gqa = GroupedQueryAttention(embed_dim, num_heads)
print("GQA output:", gqa(x, mask).shape) # [16, 10, 512]5. 多查询注意力(Multi-Query Attention, MQA)
- 原理:多个查询头(Q)共享同一组键(K)和值(V)头,减少计算量。
- 特点:牺牲部分表达能力以提升推理速度。
- 应用:资源受限场景(如边缘设备部署的轻量级模型)。
import torch
import torch.nn as nn
import torch.nn.functional as F
class MultiQueryAttention(nn.Module):
def __init__(self, dim, n_head, dropout=0.1):
super(MultiQueryAttention, self).__init__()
self.dim = dim
self.head_dim = dim // n_head
self.n_head = n_head
assert self.dim == self.head_dim * n_head
# 共享的K和V投影(MQA核心)
self.linear_q = nn.Linear(dim, dim) # 每个头独立的Q
self.linear_k = nn.Linear(dim, self.head_dim) # 共享的K
self.linear_v = nn.Linear(dim, self.head_dim) # 共享的V
self.dropout = nn.Dropout(dropout)
self.fc_out = nn.Linear(dim, dim)
def forward(self, x, mask=None):
b, t, d = x.size()
# 投影Q/K/V
Q = self.linear_q(x).view(b, t, self.n_head, self.head_dim).transpose(1, 2) # [b, h, t, d_h]
K = self.linear_k(x).unsqueeze(1).expand(-1, self.n_head, -1, -1) # [b, h, t, d_h]
V = self.linear_v(x).unsqueeze(1).expand(-1, self.n_head, -1, -1) # [b, h, t, d_h]
# Scaled dot-product attention
score = torch.matmul(Q, K.transpose(2, 3)) / torch.sqrt(torch.tensor(self.head_dim, dtype=torch.float32))
if mask is not None:
mask = mask.unsqueeze(1) # 添加头维度
score = score.masked_fill(mask == 0, -1e9)
score = F.softmax(score, dim=-1)
if self.dropout is not None:
score = self.dropout(score)
output = torch.matmul(score, V).transpose(1, 2).contiguous().view(b, t, d)
output = self.fc_out(output)
return output
def generate_mask(len_seq):
"""生成下三角掩码矩阵(用于Decoder的自回归掩码)"""
return torch.tril(torch.ones(len_seq, len_seq)).bool()
# 测试代码
batch_size, num_heads, seq_len, embed_dim = 16, 8, 10, 512
x = torch.randn(batch_size, seq_len, embed_dim)
mask = generate_mask(seq_len).unsqueeze(0).expand(batch_size, seq_len, seq_len)
mqa = MultiQueryAttention(embed_dim, num_heads)
print("MQA output:", mqa(x, mask).shape) # [16, 10, 512]6. 多层注意力(Multi-Head Latent Attention, MLA)
- 原理:通过低秩矩阵将KV Cache压缩为潜在问量,显者降低了KV Cache缓存占用和计算成本,提高了推理速度和吞吐量。(deepseek v2)
import torch
import torch.nn as nn
import torch.nn.functional as F
class MultiHeadLatentAttention(nn.Module):
def __init__(self, input_dim, latent_dim, n_head, dropout=0.1):
"""
Args:
input_dim: Dimension of input features
latent_dim: Dimension of latent space
n_head: Number of attention heads
dropout: Dropout probability
"""
super(MultiHeadLatentAttention, self).__init__()
self.input_dim = input_dim
self.latent_dim = latent_dim
self.n_head = n_head
self.head_dim = latent_dim // n_head
assert self.latent_dim == self.head_dim * n_head, "latent_dim must be divisible by n_head"
# Projections from input space to latent space
self.linear_q = nn.Linear(input_dim, latent_dim)
self.linear_k = nn.Linear(input_dim, latent_dim)
self.linear_v = nn.Linear(input_dim, latent_dim)
# Latent space projections
self.latent_proj_q = nn.Linear(latent_dim, latent_dim)
self.latent_proj_k = nn.Linear(latent_dim, latent_dim)
self.dropout = nn.Dropout(dropout)
self.fc_out = nn.Linear(latent_dim, input_dim) # Project back to input dimension
def forward(self, x, mask=None):
"""
Args:
x: Input tensor of shape [batch_size, seq_len, input_dim]
mask: Optional mask tensor of shape [batch_size, seq_len, seq_len]
Returns:
Output tensor of shape [batch_size, seq_len, input_dim]
"""
b, t, d = x.size()
# Project input to latent space
Q = self.linear_q(x) # [b, t, latent_dim]
K = self.linear_k(x) # [b, t, latent_dim]
V = self.linear_v(x) # [b, t, latent_dim]
# Further project queries and keys in latent space
Q_latent = self.latent_proj_q(Q) # [b, t, latent_dim]
K_latent = self.latent_proj_k(K) # [b, t, latent_dim]
# Reshape for multi-head attention
Q_latent = Q_latent.view(b, t, self.n_head, self.head_dim).transpose(1, 2) # [b, n_head, t, head_dim]
K_latent = K_latent.view(b, t, self.n_head, self.head_dim).transpose(1, 2) # [b, n_head, t, head_dim]
V = V.view(b, t, self.n_head, self.head_dim).transpose(1, 2) # [b, n_head, t, head_dim]
# Scaled dot-product attention in latent space
scores = torch.matmul(Q_latent, K_latent.transpose(-2, -1)) / torch.sqrt(torch.tensor(self.head_dim, dtype=torch.float32))
# Apply mask if provided
if mask is not None:
mask = mask.unsqueeze(1) # Add head dimension
scores = scores.masked_fill(mask == 0, -1e9)
# Softmax and dropout
attn_weights = F.softmax(scores, dim=-1)
if self.dropout is not None:
attn_weights = self.dropout(attn_weights)
# Apply attention to values
output = torch.matmul(attn_weights, V) # [b, n_head, t, head_dim]
# Combine heads and project back to input dimension
output = output.transpose(1, 2).contiguous().view(b, t, self.latent_dim)
output = self.fc_out(output) # [b, t, input_dim]
return output
def generate_mask(len_seq):
"""Generate lower triangular mask matrix (for autoregressive masking in decoder)"""
return torch.tril(torch.ones(len_seq, len_seq)).bool()
# 使用案例
num_heads, input_dim, latent_dim = 8, 512, 256
model = MultiHeadLatentAttention(input_dim, latent_dim, num_heads)
x = torch.randn(16, 10, input_dim) # Input shape: [batch_size, seq_len, input_dim]
mask = generate_mask(10).unsqueeze(0).expand(16, 10, 10)
output = model(x, mask)
print(output.shape) # Output: torch.Size([16, 10, 512])六、位置编码(正余弦PE,ROPE,RPE,ROPE+ 2D RPE)
| 场景 | 推荐方法 | 代表模型 |
| RoPE | 目前LLM的主流选择,外推能力强 | LLaMA、BaiChuan、ChatGLM、GPT-NeoX |
| RPE(相对位置编码) | 固定长度/局部依赖强(如 BERT、T5、Swin Transformer) | T5、Swin Transformer |
| RoPE(文本)+ 2D RPE(视觉) | 多模态模型(文本+视觉) | BLIP-2(Q-Former)、Fuyu-8B |
| ALiBi/NTK-aware RoPE | 长序列推理,长文本优化 | BLOOM、CodeLlama、Mistral |
| LAPR(可学习绝对位置编码) | 早期模型,现在逐渐被淘汰; 外推能力差;无法显式建模相对位置关系 | GPT-2、原始BERT |
1. 绝对位置编码(正余弦位置编码)
-
对于偶数维度(即2*i位置);对于奇数维度(即2*i+1位置),其中i = d_model // 2。
![]()
![]()
import torch
import math
def position_encoding(seq_len, d_model):
# 创建一个空的张量用于存储位置编码
position = torch.arange(0, seq_len).unsqueeze(1).float() # [seq_len, 1] --> (10, 1)
dim = torch.arange(0, d_model // 2).float() # [d_model // 2] # (1, 8)
# 计算位置编码
encoding = position / (10000 ** (2 * dim / (d_model))) # [10, 16 // 2]
# 分别计算sin和cos
sin_enc, cos_enc = torch.sin(encoding), torch.cos(encoding) # sin编码, cos编码
print(sin_enc.shape)
# 将sin和cos交替插入,得到完整的编码(sin值放到偶数位置, cos值放到奇数位置)
encoding = torch.zeros(seq_len, d_model) # [seq_len, d_model]
encoding[:, 0::2], encoding[:, 1::2] = sin_enc, cos_enc
return encoding
seq_len, d_model = 10, 16 # 序列长度, 嵌入维度
encoding = sinusoidal_position_encoding(seq_len, d_model)
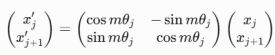
print("Sin_Cos PE:\n", encoding)2. 旋转位置编码(ROPE)
- Reference
(1) 大模型Embedding整明白了!RoPE位置编码真简单!_哔哩哔哩_bilibili
(2) 十分钟读懂旋转编码(RoPE)
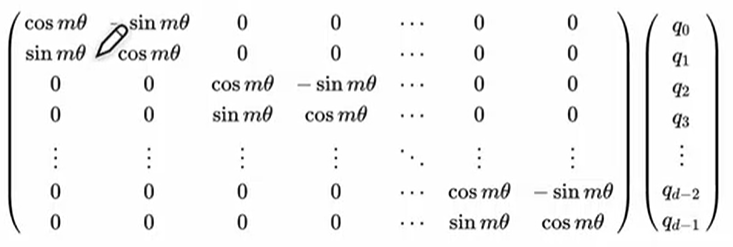
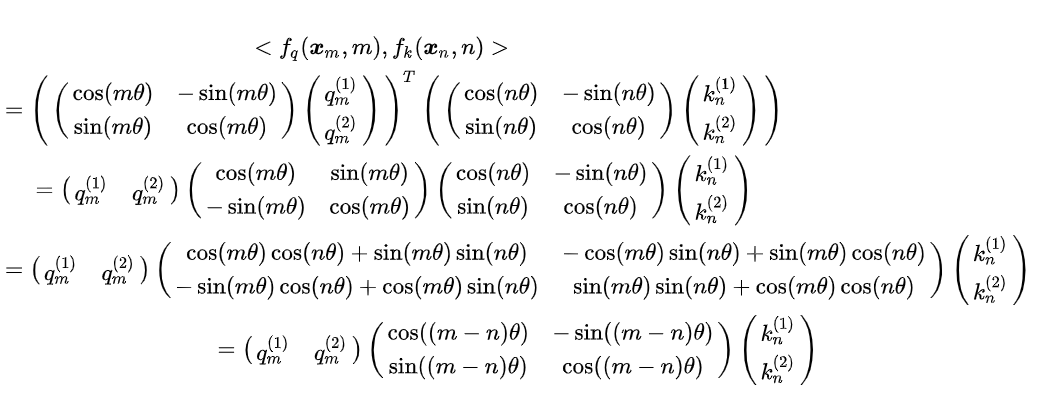
- 核心思想:将位置信息编码为旋转矩阵,作用于查询(Query)和键(Key)的注意力计算中,隐式融合绝对位置(θj = 10000−2j/d)与相对位置(m-n)的双重特性。ROPE 位置编码通过将一个向量旋转某个角度,为其赋予位置信息。对Query和Key的每个token维度对 (xi, xi+1) 应用旋转矩阵,其中θi = 10000−2i/d(频率递减)。
- 优点:
- 外推性强:支持超长序列推理(如LLaMA-2支持4k→16k扩展);
- 远程衰减:通过波长设计自动衰减远发离依赖;
- 数学等价:通过旋转操作实现相对位置偏移的数学等价性。
- 使用场景:
- 长文本生成(如Qwen系列模型),需处理超长上下文(如32Ktoken以上);
- 多模态任务(如图文对齐),需灵活适配不同态的序列长度。
- 关键公式:

### 手撕ROPE
import torch
import torch.nn as nn
import numpy as np
np.random.seed(42)
torch.manual_seed(42)
class RotaryEmbedding(nn.Module):
def __init__(self, d_model, num_heads, base=10000, max_len=512):
super().__init__()
self.head_dim = d_model // num_heads
half_dim = self.head_dim // 2
pos = torch.arange(max_len).float()
freqs = 1.0 / (base ** (2 * torch.arange(half_dim).float() / self.head_dim))
angles = torch.einsum("i,j->ij", pos, freqs) # m*θ [max_len, half_dim]
sin = torch.sin(angles).repeat_interleave(2, -1) # sin(m*θ)
cos = torch.cos(angles).repeat_interleave(2, -1) # cos(m*θ)
self.register_buffer("cos", cos[None, :, :]) # [1, max_len, head_dim]
self.register_buffer("sin", sin[None, :, :]) # [1, max_len, head_dim]
def forward(self, q): # q: [B, T, D]
B, T, D = q.shape
q = q.view(B, T, -1, self.head_dim).transpose(1, 2) # [B, H, T, D/H]
cos = self.cos[:, :T, :].unsqueeze(1) # [1, 1, T, D/H]
sin = self.sin[:, :T, :].unsqueeze(1)
# 把 q(形状 [B, H, T, D/H])分成两个子张量:
# q1: 取偶数维度(即第 0、2、4…),q2: 取奇数维度(即第 1、3、5…)
q1, q2 = q[..., ::2], q[..., 1::2]
q_rot = torch.stack([q1 * cos[..., ::2] - q2 * sin[..., ::2],
q1 * sin[..., ::2] + q2 * cos[..., ::2]], dim=-1)
return q_rot.flatten(-2, -1) # [B, H, T, (D/H)/2, 2]--> [B, H, T, D/H]
# 示例调用
bs, num_heads, T, d_model = 4, 8, 128, 512
q = torch.randn(bs, seq_len, d_model)
rope = RotaryEmbedding(d_model, num_heads)
q_rope = rope(q)
q_rope.shape # [4, 8, 128, 64]
- ROPE V.S. 绝对PE(正余弦编码)
| 特性 | RoPE | 绝对PE(LAPR) |
| 位置信息注入 | 通过旋转融入Q/K计算(动态) | 直接加到输入上(静态) |
| 相对位置感知 | ✅ 自动编码相对距离 | ❌ 需模型自行学习 |
| 外推能力 | ✅ 支持任意长度(旋转矩阵普适) | ❌ 超出训练长度时失效 |
| 计算效率 | O(1)(无需存储位置矩阵) | O(L)(需存储位置嵌入) |
| 适用场景 | 大模型、长文本 | 固定长度任务(如BERT) |
- 为什么理论上可以无限外推
- 数学原理:RoPE的旋转矩阵性质保证:对于任意位置差 k=m−n,旋转角度 θjk 始终有效,与 m,n 的绝对值无关。
- 频率衰减设计:高频(小 j)编码局部信息,低频(大 j)编码全局信息,确保长程依赖仍能被捕捉。
- 工程表现:即使推理时输入远超训练长度(如训练4k,推理32k),RoPE无需调整仍能保持性能(如LLaMA-2的上下文扩展)。
- 无限长输入的原因与解决方案:原因——注意力计算复杂度,原始自注意力的 O(L2) 计算成本;训练数据偏差,长文本的稀疏性使模型未充分学习远距离依赖。解决方案——稀疏注意力,如Longformer的滑动窗口;外推优化,NTK-aware RoPE:动态调整频率基θj(如CodeLlama);线性插值,将位置索引 m 压缩为 m/α(α 为缩放因子)。
- 怎么控制image token的长度
- Patch合并:ViT将图像分割为 N×N patches(如14×14=196),通过卷积步长或池化减少token数。
- 可学习查询压缩:Q-Former用少量可学习query(如32个)通过交叉注意力聚合视觉特征。
- Perceiver Resampler:使用固定数量的latent token(如64)压缩原始视觉token。
七、Decoder解码
| 策略 | 优点 | 缺点 | 适用场景 |
| Greedy Search | 简单高效 | 缺乏多样性 | 确定性任务(如机器翻译) |
| Beam Search | 更全局化的决策 | 计算开销大,可能生成通用文本,改进用n-gram策略。 | 文本摘要、翻译 |
| Temperature Sampling | 灵活控制多样性 | 需调参 T | 开放域生成(如对话) |
| Top-k Sampling | 过滤低质量词 | k 固定,可能不适应所有上下文 | 通用文本生成 |
| Top-p Sampling | 动态候选词数量,更鲁棒 | 需调参 p | 创意写作、故事生成 |
1. Greedy Search
- 原理:每一步选择当前概率最高的词,即
argmax(P(w|context)); - 特点:计算高效,但可能陷入重复或局部最优;缺乏多样性,生成结果可能过于保守。
def greedy_search(logits):
return torch.argmax(logits, dim=-1)
# 示例
logits = torch.tensor([[0.1, 0.5, 0.4]])
print(greedy_search(logits)) # 输出: tensor([1])2. Beam Search
- 原理:保留Top-K(
beam_width)个候选序列,每一步扩展这些序列并保留总概率最高的K个; - 特点:比贪心搜索更全局化,但可能生成过于通用的文本(使用n-gram策略改进);超参数
beam_width影响效果和计算开销。
def beam_search(logits, beam_width=2):
probs, indices = torch.topk(logits.softmax(dim=-1), beam_width, dim=-1)
return indices, probs
# 示例
logits = torch.tensor([[0.1, 0.5, 0.4]])
indices, probs = beam_search(logits)
print(indices) # 输出: tensor([[1, 2]])3. Temperature Sampling
- 原理:通过温度参数
T调整概率分布:T=1:原始分布;T>1:平滑分布(更多多样性);T<1:尖锐分布(更确定性);- P(w) = exp(logits/T) / sum(exp(logits/T))
def temperature_sampling(logits, temperature=1.0):
probs = torch.softmax(logits / temperature, dim=-1)
return torch.multinomial(probs, num_samples=1) # 概率分布采样
# 示例
logits = torch.tensor([[1.0, 2.0, 3.0]])
print(temperature_sampling(logits, temperature=0.5)) # 可能输出: tensor([2])4. Top-k Sampling(手撕)
- 原理:仅从概率最高的前
k个词中采样,过滤低概率词; - 特点:平衡多样性与质量,但
k是固定值,可能在某些上下文下不合适。
def top_k_sampling(logits, k=2):
values, indices = torch.topk(logits, k)
probs = torch.softmax(values, dim=-1)
return indices[torch.multinomial(probs, 1)]
# 示例
logits = torch.tensor([[1.0, 2.0, 3.0, 4.0]])
print(top_k_sampling(logits, k=2)) # 可能输出: tensor([3])5. Top-p Sampling(手撕)
- 原理:从累积概率超过阈值
p的最小词集合中采样; - 特点:动态调整候选词数量,适应不同上下文。
def top_p_sampling(logits, p=0.9):
probs = torch.softmax(logits, dim=-1)
sorted_probs, sorted_indices = torch.sort(probs, descending=True)
cum_probs = torch.cumsum(sorted_probs, dim=-1)
mask = cum_probs <= p
mask = torch.cat([torch.ones_like(mask[:1]), mask[:-1]], dim=0)
filtered_probs = sorted_probs * mask
sampled_idx = torch.multinomial(filtered_probs, 1)
return sorted_indices[sampled_idx]
# 示例
logits = torch.tensor([[0.1, 0.3, 0.2, 0.4]])
print(top_p_sampling(logits, p=0.8)) # 可能输出: tensor([3])八、NLP、CV、AIGC、MLLMs经典算法
(写不动了,后面再填坑吧......)
1. NLP
rnn, lstm, attention, bert, gpt, transformer;
2. CV
cnn, vit, resnet, clip, blip, yolo系列, fastcnn, detr, inception, sam, dino;
3. AIGC
VAE系列, GAN系列,Text-Guided系列, SD系列-ddpm/ddim/ldm/repaint-fastpaint论文,SD优劣&常见的采样方式(ddim,dpm++,lcm,turbo)&原理&loss函数,sdxl相对sd的改进方式;
4. MLLMs
CLIP,SigLIP,EVA-CLIP,ALBEF,BLIP,BLIP2,Instruct-BLIP,Flamingo,MiniCPM-V,LlaVA,CogVLM,Qwen-VL系列,InternVL系列,Deepseek-多模系列;
在“ 多模态学习路线(3)—— MLLMs主流模型 ”里会更新 & 详细介绍。


















 4359
4359

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









