







图像分割
图像分类(只关注类别)→目标检测(要框出位置)→语义分割(分割不同物品,但是相同类别的物品视为同一个)→实例分割(分割每一个物体,相同类别的不同物体视为不同个体)
目的:
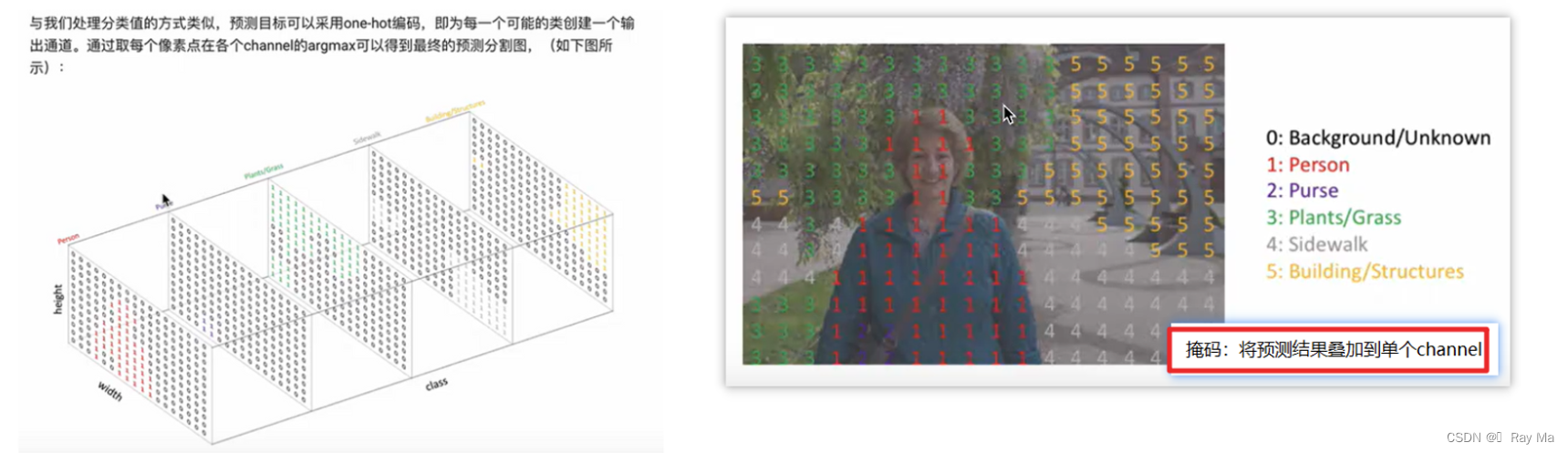
预测目标:
任务类型:
语义分割、实例分割(目标检测+语义分割)
常用数据集:
PASCAL VOC,城市风光数据集(Cityspaces,用于自动驾驶)、coco数据集
评价指标:像素精度、类别平均像素准确率、交并比、平均交并比
-
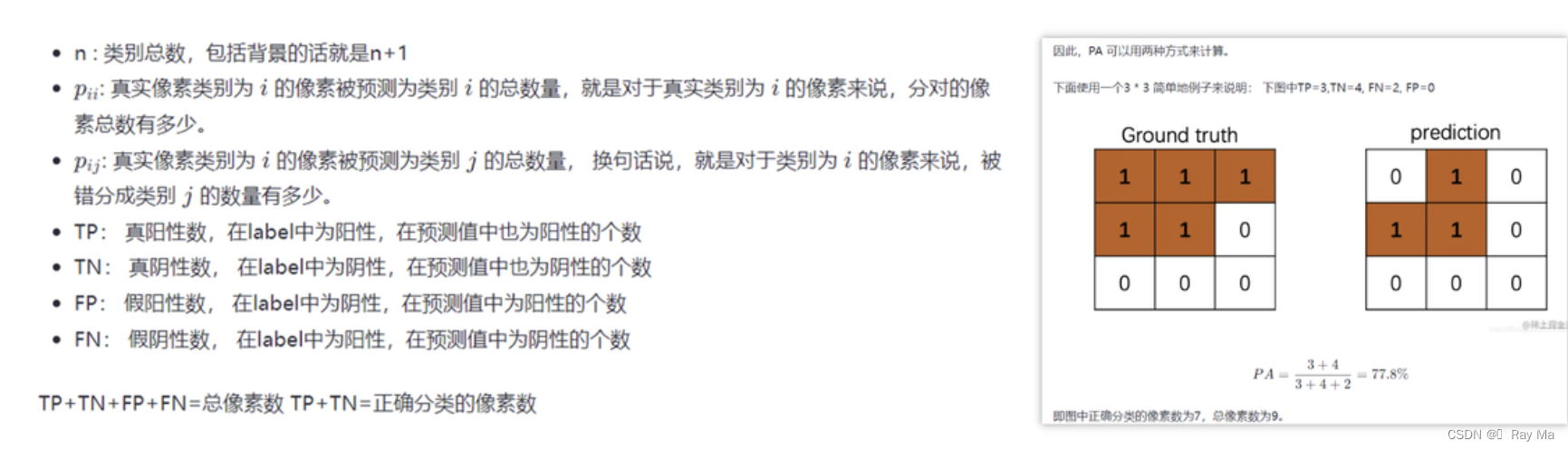
像素精度(Pixel Accuracy,PA):**图像中正确分类的像素百分比,即分类正确的像素占总像素的比例(二分类对应机器学习中的准确率(Accuracy))
-
类别平均像素准确率(Mean Pixel Accuracy,MPA): 分别计算每个类被正确分类像素数的比例,然后累加求平均。
-
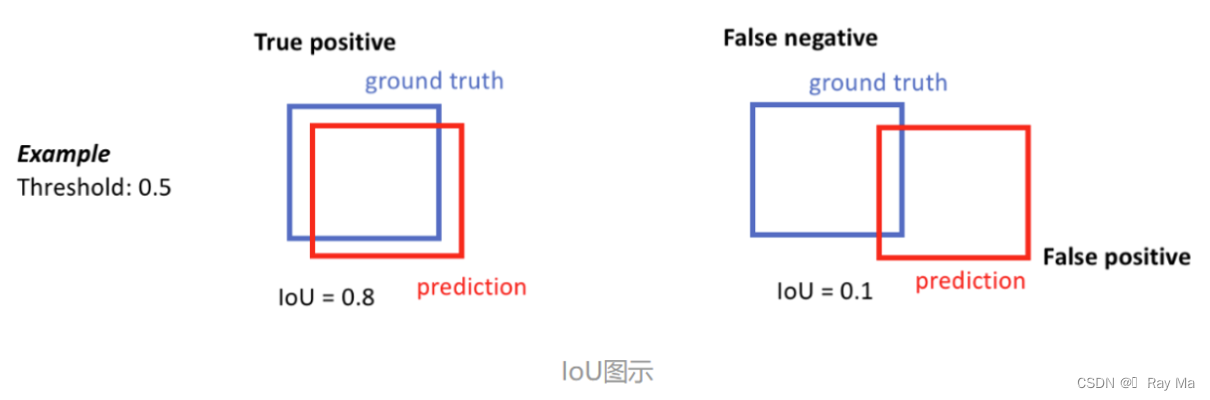
交并比(Intersection over Union,IoU): 交并比表示的含义是模型对某一类别预测结果和真实值的交集与并集的比值。只不过对于目标检测而言是检测框和真实框之间的交并比,而对于图像分割而言是计算预测掩码和真实掩码之间的交并比。
对于二分类问题,
-
平均交并比(Mean Intersection over Union,MIoU),即预测区域和实际区域交集除以预测区域和实际区域的并集,这样计算得到的是单个类别下的IoU,然后重复此算法计算其它类别的IoU,再计算它们的平均数即可。它表示的含义是模型对每一类预测的结果和真实值的交集与并集的比值,之后求和再计算平均。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3154
3154

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









