







 本文详细介绍了如何使用Verilog设计FIFO控制器,包括接口定义、设计思路及具体实现代码。通过实例展示了FIFO控制器在时钟同步下的工作原理,提供了测试代码和仿真波形,帮助理解FIFO在数字系统中的应用。
本文详细介绍了如何使用Verilog设计FIFO控制器,包括接口定义、设计思路及具体实现代码。通过实例展示了FIFO控制器在时钟同步下的工作原理,提供了测试代码和仿真波形,帮助理解FIFO在数字系统中的应用。
Verilog数字系统设计十二
复杂数字电路设计2
前言
随着人工智能的不断发展,机器学习这门技术也越来越重要,很多人都开启了学习机器学习,本文就介绍了机器学习的基础内容。提示:以下是本篇文章正文内容:
FIFO 是先入先出存储器的缩写,FIFO 控制器在数字系统中被大量使用,可以作为数据缓存使用。
一、什么是FIFO控制器?
FIFO 是先入先出存储器的缩写,FIFO 控制器在数字系统中被大量使用,可以作为数据缓存使用。
二、编程
1.要求:
- FIFO控制器设计
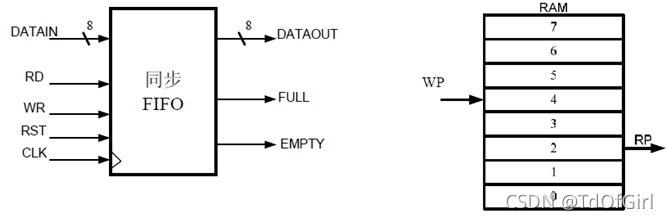
- FIFO 是先入先出存储器的缩写,FIFO 控制器在数字系统中被大量使用,可以作为数据缓存使用。时钟同步的FIFO 控制器接口如下图所示,主要接口信号定义如下:
RST_N:异步复位信号,当RST_N 为低电平时,FULL 输出‘0’,EMPTY 信号输出‘1’电平,FIFO 指针指向0,FIFO 被清空;
CLK:时钟信号,输出信号与CLK 信号同步;
DATAIN:数据输入信号,8 位总线;
RD:读有效信号,高电平有效,当RD 位高时,在时钟信号CLK 的上升沿,DATAOUT 输出一个8 位的有效数据;
WR:写有效信号,当WR 为高电平时,在CLK 的上升沿,从DATAIN 信号向存储器写入一个8 位的有效数据;
DATAOUT:数据输出信号,8 位总线,在CLK 的上升沿,当RD 为高电平时,从FIFO 中输出一个8 位的数据;
FULL:存储器写满标志信号,高电平时表示存储器中的数据已经写满;
EMPTY:存储器读空标志信号,高电平时表示存储器中的数据已经被读空了;
2.设计思路:
3.FIFO控制器实现:
代码如下:
module fifo(dataOut,full,empty,clk,rst,dataIn,wr,rd);
input clk,rst,wr,rd;
output full,empty;
input[3:0] dataIn;
output[3:0] dataOut;
reg[3:0] fifo_reg[3:0];
reg[1:0] w_head,R_tail;
reg[1:0] count;
reg [3:0] dout;
reg f,e;
parameter MAX = 3;
//*************update w_head*************
always @ (posedge clk)
if(!rst)
w_head <= 2'd0;
else if(wr && !full)
w_head <= w_head +1'b1;
//*************update R_tail*************
always @ (posedge clk)
if(!rst)
R_tail <= 2'd0;
else if(rd && !empty)
R_tail <= R_tail + 1'b1;
//**************count************
always @(posedge clk)
if(!rst)
count <= 2'd0;
else
case({rd,wr})
2'b00:
count <= count;
2'b01:
if(count != MAX)
count <= count + 1'b1;
2'b10:
if(count != 0)
count <= count - 1'b1;
2'b11:
;
endcase
//************rd**********
always @(posedge clk)
if(!rst)
dout <= 4'd0;
else if(rd && !empty)
dout <= fifo_reg[R_tail];
///***************wr**********
always @(posedge clk)
if(wr && !full)
fifo_reg[w_head] <= dataIn;
always @ (posedge clk)
if(count==0)
e <= 1'b1;
else
e <= 1'b0;
always @ (posedge clk)
if(count==MAX)
f <= 1'b1;
else
f <= 1'b0;
assign full = f;
assign empty = e;
assign dataOut = dout;
endmodule
测试代码如下:
module fifo_tb();
reg clk_t,rst_t,wr_t,rd_t;
reg [3:0] dataIn_t;
wire [3:0] dataOut_t;
wire full_t,empty_t;
initial
begin
clk_t =0;
rst_t =0;
#100
rst_t = 1;
wr_t =0;
rd_t = 0;
#20
wr_t = 1;
dataIn_t = 4'd1;
#20
dataIn_t = 4'd2;
#20
dataIn_t = 4'd3;
#20
dataIn_t = 4'd4;
#20
wr_t =1;
#20
wr_t =0;
rd_t =1;
#100;
rd_t = 0;
wr_t = 1;
dataIn_t = 4'd6;
#20
dataIn_t = 4'd7;
rd_t = 1;
#20
dataIn_t = 4'd8;
#20
dataIn_t = 4'd9;
#20
wr_t = 1;
dataIn_t = 4'd5;
#20
dataIn_t = 4'd2;
#20
rd_t =0;
dataIn_t = 4'd3;
#20
dataIn_t = 4'd4;
#20
wr_t =0;
rd_t =1;
end
always #10 clk_t =~clk_t;
fifo myfifo(
.clk(clk_t),
.rst(rst_t),
.wr(wr_t),
.rd(rd_t),
.dataIn(dataIn_t),
.dataOut(dataOut_t),
.full(full_t),
.empty(empty_t)
);
endmodule
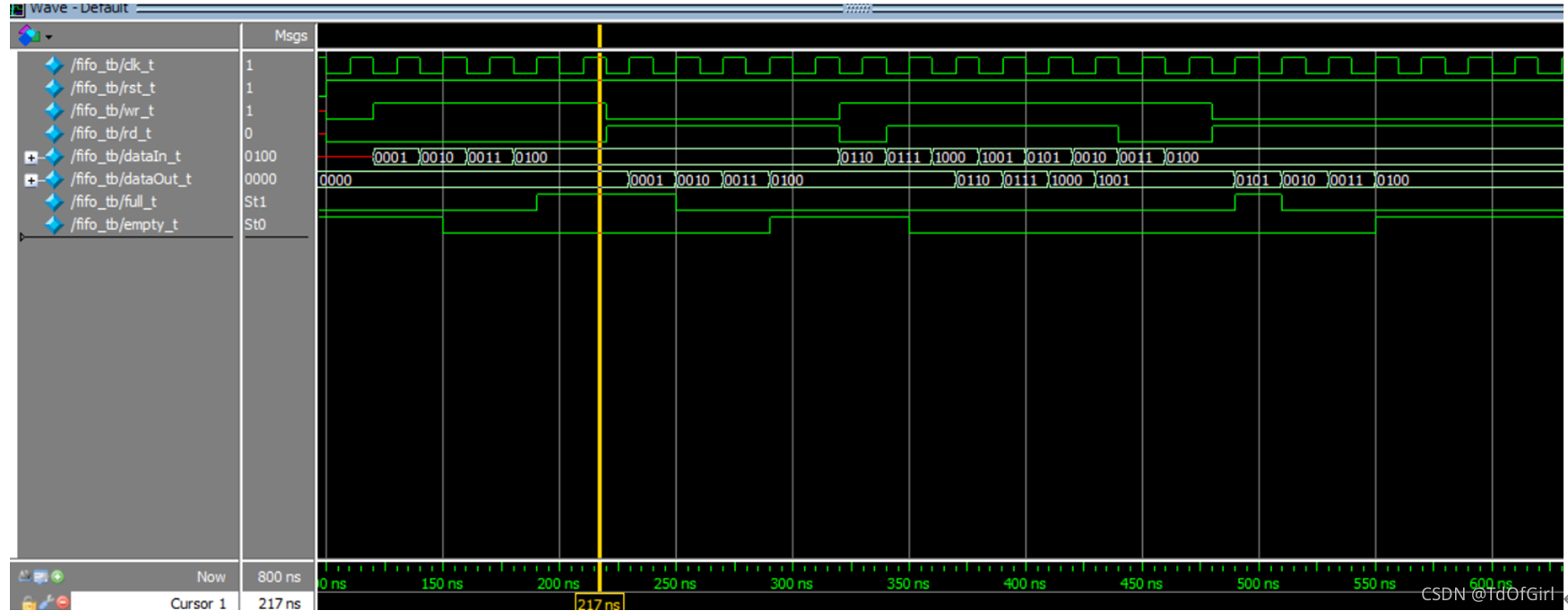
仿真波形如下:
总结
提示:
以上就是今天要分享的内容,本文仅仅简单介绍了用Verilog实现FIFO控制器设计。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









