







在数据采集过程中,由于各种因素(如电路干扰、电源噪声、电磁干扰、采样技术的限制等)的影响,原始数据中往往会掺杂一些噪声或误差。这些噪声数据可能会严重影响最终数据的准确性,从而对后续的数据分析、模型构建或决策制定产生误导。因此,为了获得更准确、更可靠的数据,需要对原始数据进行滤波处理。
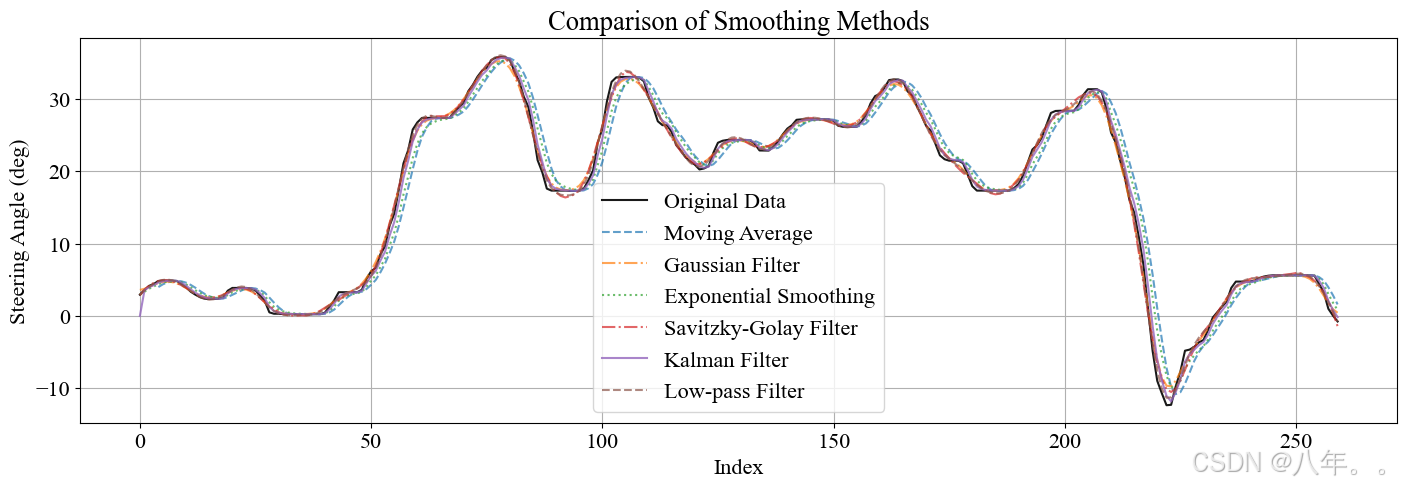
以下是我所采集的一组方向盘转角数据样本,我计划运用多种滤波技术对其进行处理,旨在通过对比分析各种滤波方法的效果,从而甄选出一种相对而言表现更为优异的滤波策略。
总的函数放在最后。
其中使用到的滤波方法有:
一、移动平均(Moving Average)
1、原理:
移动平均滤波是一种简单的平滑方法,它通过对相邻的若干个数据点进行平均来减小数据的波动。通常使用固定大小的窗口滑动计算每个数据点的平均值。
- 优点:简单,计算量小,能够有效去除低频噪声。
- 缺点:信号的动态性会丢失,延迟较大,且不适合处理高频成分。
2、Python函数:
使用 pandas 库中的 rolling().mean() 方法进行计算。
import pandas as pd
# 假设已加载数据
steering_angle = data['Steering_Angle(deg)']
# 设置窗口大小
window_size = 5
# 移动平均法
moving_average = steering_angle.rolling(window=window_size).mean()修改一个参数:窗口大小window_size
window_size 决定了每个点的“平均范围”。window_size 较大时,平滑效果更明显,但细节会丢失;window_size 较小,平滑效果较弱,但可以较好地保留信号的波动。
- 较小的
window_size:对信号的平滑作用较小,噪声可能没有被有效去除,信号的局部波动较为明显。 - 较大的
window_size:对信号的平滑作用更强,噪声被更好地抑制,但信号的动态变化(例如快速变化或突变的部分)可能会被模糊。
3、具体平滑效果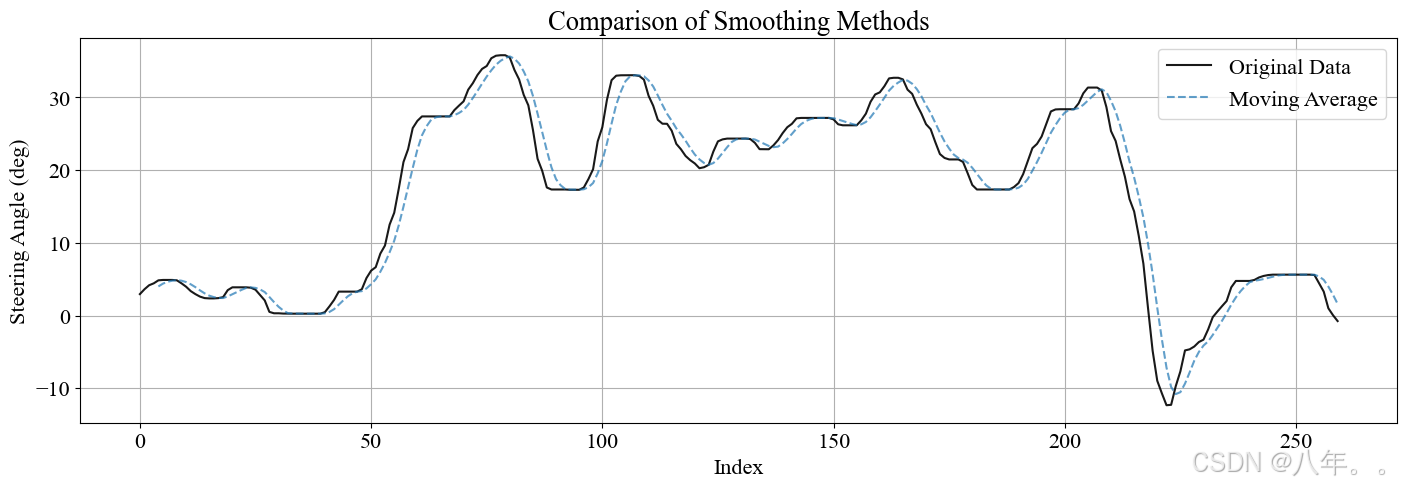
可以看到有明显延迟。
二、高斯滤波(Gaussian Filter)
1、原理:
高斯滤波是一种通过加权平滑信号的方法,权重由高斯函数决定。这种函数的权重分布呈钟形曲线,中心点权重大,越远离中心的点权重越小。相比其他平滑滤波方法(如简单移动平均),它更倾向于保持原始信号的形状,同时减少高频噪声。
- 优点:由于高斯函数的连续性和权重分布,高斯滤波能更平滑地抑制噪声,同时不会明显地引入阶跃现象或失真。在去噪的同时能较好地保留信号的低频部分。高斯滤波特别适合处理具有随机高频噪声的数据。
- 缺点:对于快速变化的信号可能存在模糊,尤其是频率较高的部分。
2、Python函数:
使用 scipy.ndimage 中的 gaussian_filter1d() 函数。
from scipy.ndimage import gaussian_filter1d
# 高斯滤波(标准差设置为2)
gaussian_smoothed = gaussian_filter1d(steering_angle, sigma=2)修改一个参数:标准差sigma
sigma 是指高斯函数的标准差,控制了滤波器的平滑程度。sigma 值越大,高斯滤波器的影响范围越广,信号的平滑效果越强,但也可能会抑制更多的细节;sigma 值越小,平滑效果越弱,信号的细节保留得更多,但噪声可能没有有效去除。
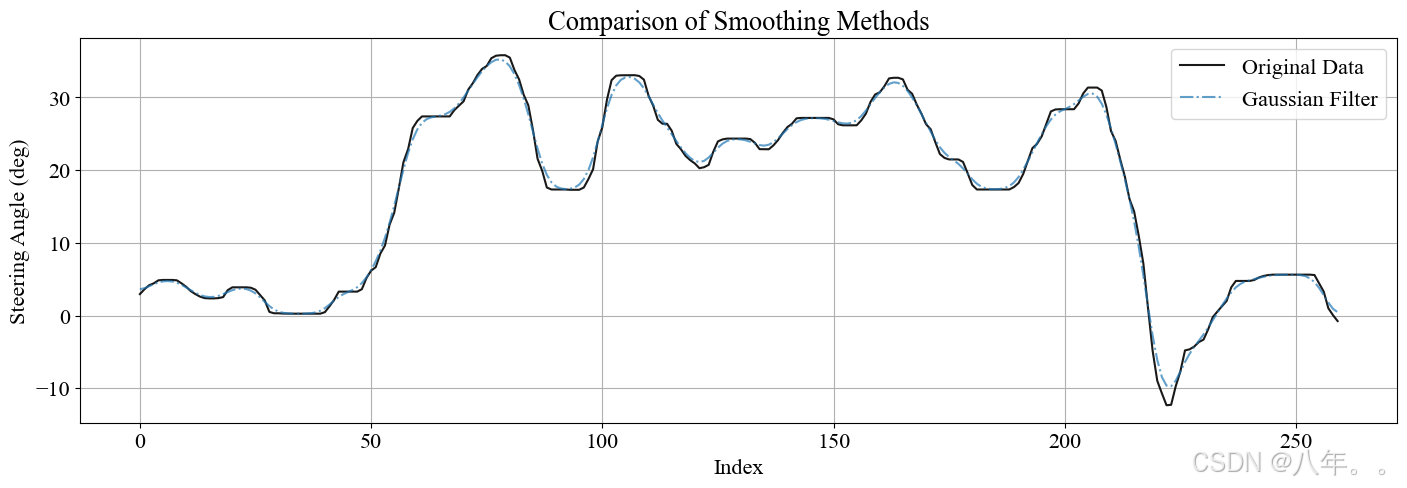
3、具体平滑效果
三、指数平滑(Exponential Smoothing)
1、原理:
指数平滑通过给每个数据点赋予一个衰减的权重,最近的数据点权重更大,远离的数据点权重较小。其数学表达式为:
其中 α为平滑因子,X_t为当前值,S_t为平滑值。
- 优点:响应快速,适合动态变化的信号。
- 缺点:可能会抑制较高频的动态变化。
2、Python函数:
使用 pandas 中的 ewm() 函数来进行指数平滑。
# 设置平滑因子
alpha = 0.4
# 指数平滑法
exponential_smoothed = steering_angle.ewm(alpha=alpha).mean()
修改一个参数:平滑因子alpha,
alpha 控制了平滑时新数据和历史数据的相对权重,决定了对历史数据的“记忆”长度。alpha 的范围: alpha 通常在 0 到 1 之间。
- 较小的
alpha(接近 0): 表示更多的权重给历史数据,平滑效果较强,短期波动不会对结果产生很
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 243
243

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









