






SLAM相关工具
KITTI数据集
序列对应
00: 2011_10_03_drive_0027
01: 2011_10_03_drive_0042
02: 2011_10_03_drive_0034
03: 2011_09_26_drive_0067
04: 2011_09_30_drive_0016
05: 2011_09_30_drive_0018
06: 2011_09_30_drive_0020
07: 2011_09_30_drive_0027
08: 2011_09_30_drive_0028
09: 2011_09_30_drive_0033
10: 2011_09_30_drive_0034
00-21sequence的相机内参
● 00sequence
f x = 718.8560 ,c x = 607.1928 ,f y = 718.8560 ,c y = 185.2157 和b = 0.5372
● 01sequence
f x = 718.8560 ,c x = 607.1928 ,f y = 718.8560 ,c y = 185.2157 和b = 0.5372
● 02sequence
f x = 718.8560 ,c x = 607.1928 ,f y = 718.8560 ,c y = 185.2157 和b = 0.5372
● 03sequence
f x = 721.5377 ,c x = 609.5593 ,f y = 721.5377 ,c y = 183.1104 和b = 0.5372
● 04sequence
f x = 707.0912 ,c x = 601.8873 ,f y = 707.0912 ,c y = 172.8540 和b = 0.5372
● 05sequence
f x = 707.0912 ,c x = 601.8873 ,f y = 707.0912 ,c y = 183.1104 和b = 0.5372
● 06sequence
f x = 707.0912 ,c x = 601.8873 ,f y = 707.0912 ,c y = 183.1104 和b = 0.5372
● 07sequence
f x = 707.0912 ,c x = 601.8873 ,f y = 707.0912 ,c y = 183.1104和b = 0.5372
● 08sequence
f x = 707.0912 ,c x = 601.8873 ,f y = 707.0912 ,c y = 183.1104 和b = 0.5372
● 09sequence
f x = 707.0912 ,c x = 601.8873 ,f y = 707.0912 ,c y = 183.1104 和b = 0.5372
● 10sequence
f x = 707.0912 ,c x = 601.8873 ,f y = 707.0912 ,c y = 183.1104 和b = 0.5372
● 11sequence
f x = 707.0912 ,c x = 601.8873 ,f y = 707.0912 ,c y = 183.1104 和b = 0.5372
● 12sequence
f x = 707.0912 ,c x = 601.8873 ,f y = 707.0912 ,c y = 183.1104 和b = 0.5372
● 13sequence
f x = 718.8560 ,c x = 607.1928 ,f y = 718.8560 ,c y = 185.2157 和b = 0.5372
● 14sequence
f x = 718.8560 ,c x = 607.1928 ,f y = 718.8560 ,c y = 185.2157 和b = 0.5372
● 15sequence
f x = 718.8560 ,c x = 607.1928 ,f y = 718.8560 ,c y = 185.2157 和b = 0.5372
● 16sequence
f x = 718.8560 ,c x = 607.1928 ,f y = 718.8560 ,c y = 185.2157 和b = 0.5372
● 17sequence
f x = 718.8560 ,c x = 607.1928 ,f y = 718.8560 ,c y = 185.2157 和b = 0.5372
● 18sequence
f x = 718.8560 ,c x = 607.1928 ,f y = 718.8560 ,c y = 185.2157 和b = 0.5372
● 19sequence
f x = 718.8560 ,c x = 607.1928 ,f y = 718.8560 ,c y = 185.2157 和b = 0.5372
● 20sequence
f x = 718.8560 ,c x = 607.1928 ,f y = 718.8560 ,c y = 185.2157 和b = 0.5372
● 21sequence
f x = 718.8560 ,c x = 607.1928 ,f y = 718.8560 ,c y = 185.2157 和b = 0.5372
ALOAM跑kitti数据集
A-LOAM运行KITTI数据集需要运行kittiHelper节点
在自己的源码仓库里有文件
在A-LOAM的源码中有该程序,launch文件如下
<launch>
<arg name="number" default="05" />
<arg name="output_file" default="/home/john/rosbag/kitti_rosbag" />
<!-- kittiHelper是使用kitti数据集的一个启动launch -->
<node name="kittiHelper" pkg="aloam_velodyne" type="kittiHelper" output="screen">
<!-- 数据集文件夹位置:${HOME}是~文件夹 -->
<param name="dataset_folder" type="string" value="/home/john/rosbag/kitti_origin/dataset/" />
<!-- 顺序数字 -->
<param name="sequence_number" type="string" value="$(arg number)" />
<!-- 计算轨迹的同时打包成bag输出 -->
<!-- <param name="to_bag" type="bool" value="false" /> -->
<param name="to_bag" type="bool" value="true" />
<!-- 输出为bag的位置,需采用绝对路径 -->
<param name="output_bag_file" type="string" value="$(arg output_file)/kitti_$(arg number).bag" />
<!-- replace with your output folder -->
<!-- <param name="output_bag_file" type="string" value="/home/john/rosbag/kitti_rosbag/kitti_00.bag" /> -->
<!-- 发布延迟 -->
<param name="publish_delay" type="int" value="1" />
</node>
</launch>
cpp文件可以不做修改,主要是发布的"/camera_init"改为"camera_init"的小毛病,不影响观看
kitti数据集结构:
├── poses
│ ├── 00.txt
│ ├── ...
└── sequences
├── 00
│ ├── calib.txt
│ ├── image_0
│ │ ├── 000000.png
│ │ ├── ...
│ ├── image_1
│ │ ├── 000000.png
│ │ ├── ...
│ ├── image_2
│ │ ├── 000000.png
│ │ ├── ...
│ ├── image_3
│ │ ├── 000000.png
│ │ ├── ...
│ ├── times.txt
│ ├── tum_00_gt.txt
│ ├── velodyne
│ │ ├── 000000.bin
│ │ ├── ...
├── ...
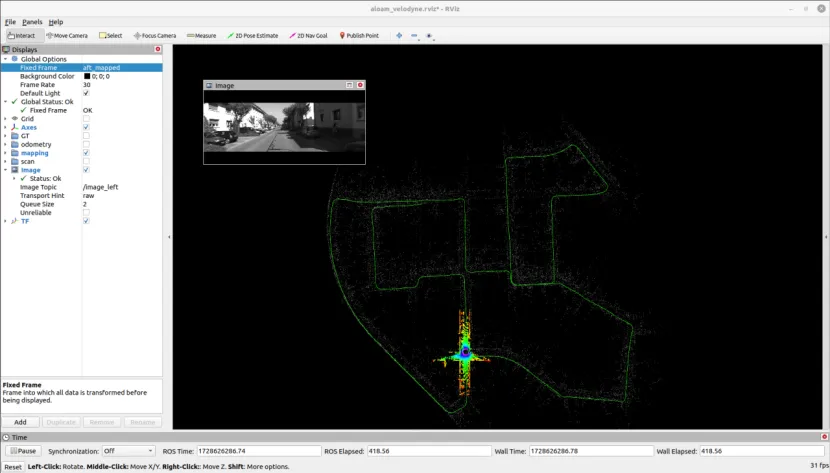
修改好之后,运行launch文件,打开rviz逐帧显示KITTI数据集:
roslaunch aloam_velodyne kitti_helper.launch
接下来运行SLAM:
roslaunch aloam_velodyne kitti_helper.launch
roslaunch aloam_velodyne aloam_velodyne_HDL_64.launch
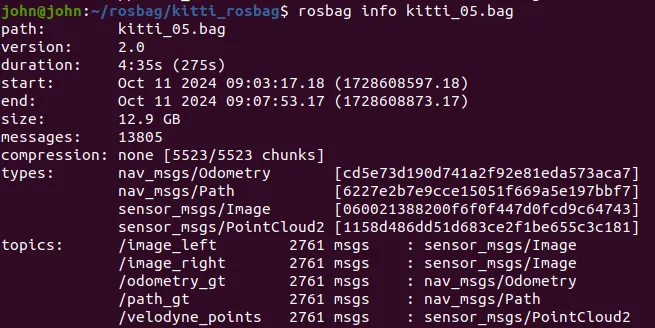
aloam跑图的结果
修改launch文件,自动生成rosbag:
<!-- <param name="to_bag" type="bool" value="false"/> -->
<param name="to_bag" type="bool" value="true"/>
<param name="output_bag_file" type="string" value="/tmp/kitti.bag" />
<!-- replace with your output folder -->
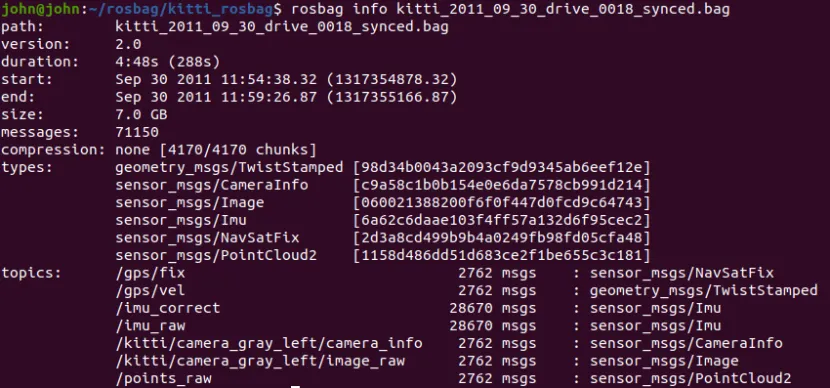
未包含IMU的数据集信息:
LIO-SAM跑KITTI数据集
如果要保存点云及轨迹等结果,在参数文件params.yaml中打开并修改保存路径:
savePCD: true
savePCDDirectory: "/Downloads/LIOSAM/"
park数据集可验证GPS松组合效果,如果要使用GPS数据,则需要进行如下修改:
gpsTopic: "odometry/gpsz" 改为 gpsTopic: "odometry/gps"
useImuHeadingInitialization: false 改为 useImuHeadingInitialization: true
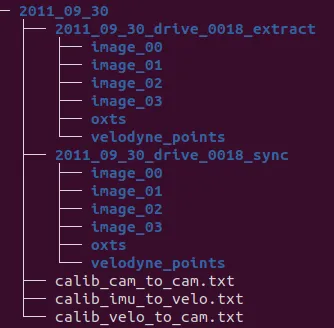
kitti2bag工具输出的bag文件LIO-SAM是不能跑的,IMU频率跟雷达一样很低频,无法满足代码需求,而且没有ring和time标签。LIO-SAM作者自己改了kitti2bag就在源码的文件夹LIO-SAM/config/doc/kitti2bag下,你需要准备如下文件(文件位置需对应):
├── 2011_09_30_drive_0018_extract
│ ├── image_00
│ ├── image_01
│ ├── image_02
│ ├── image_03
│ ├── oxts
│ └── velodyne_points
├── 2011_09_30_drive_0018_sync
│ ├── image_00
│ ├── image_01
│ ├── image_02
│ ├── image_03
│ ├── oxts
│ └── velodyne_points
├── calib_cam_to_cam.txt
├── calib_imu_to_velo.txt
└── calib_velo_to_cam.txt
下载使用wget:
wget https://s3.eu-central-1.amazonaws.com/avg-kitti/raw_data/2011_09_30_calib.zip
wget https://s3.eu-central-1.amazonaws.com/avg-kitti/raw_data/2011_09_30_drive_0018/2011_09_30_drive_0018_sync.zip
wget https://s3.eu-central-1.amazonaws.com/avg-kitti/raw_data/2011_09_30_drive_0018/2011_09_30_drive_0018_extract.zip
解压后就是上述文件夹层级
可以参考下文的evo工具
然后,在2011_09_30文件夹的上一级目录,即kitti2bag.py文件下打开终端,输入:
python3 kitti2bag.py -t 2011_09_30 -r 0018 raw_synced
运行结果(注意文件目录结构一定按照上面的要求来,否则无法运行):
包含IMU信息的数据集
参数文件配置,主要修改以下两个文件的内容:
# params_kitti.yaml
# Topics
pointCloudTopic: "/points_raw" # Point cloud data
imuTopic: "/imu_raw" # IMU data
# KITTI
sensor: velodyne # lidar sensor type, either 'velodyne' or 'ouster'
N_SCAN: 64 # number of lidar channel (i.e., 16, 32, 64, 128)
Horizon_SCAN: 2083 # lidar horizontal resolution (Velodyne:1800, Ouster:512,1024,2048)
downsampleRate: 1 # default: 1. Downsample your data if too many points. i.e., 16 = 64 / 4, 16 = 16 / 1
lidarMinRange: 1.0 # default: 1.0, minimum lidar range to be used
lidarMaxRange: 1000.0 # default: 1000.0, maximum lidar range to be used
# IMU内参影响不大,这里也没改
# kitti外参
# extrinsicTrans、extrinsicRot表示imu -> lidar的坐标变换
extrinsicTrans: [-8.086759e-01, 3.195559e-01, -7.997231e-01]
extrinsicRot: [9.999976e-01, 7.553071e-04, -2.035826e-03,
-7.854027e-04, 9.998898e-01, -1.482298e-02,
2.024406e-03, 1.482454e-02, 9.998881e-01]
# extrinsicRPY用于旋转imu坐标系下的欧拉角(姿态信息)到lidar坐标下,由于lio-sam作者使用的imu的欧拉角旋转指向与lidar坐标系不一致(左手系),因此使用了两个不同的旋转矩阵,但是大部分的设备两个旋转应该是设置为相同的
extrinsicRPY: [9.999976e-01, 7.553071e-04, -2.035826e-03,
-7.854027e-04, 9.998898e-01, -1.482298e-02,
2.024406e-03, 1.482454e-02, 9.998881e-01]
<!-- run_kitti.launch -->
<!-- Parameters -->
<rosparam file="$(find lio_sam)/config/params_kitti.yaml" command="load" />
运行:
roslaunch lio_sam run.launch
rosbag play kitti_2011_09_30_drive_0033_synced.bag
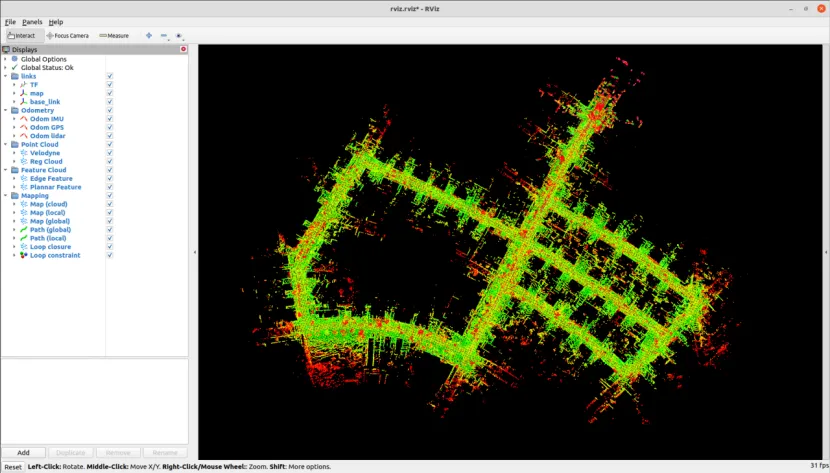
lio-sam的跑图结果:

evo工具
evo程序github地址
使用KITTI跑LIOSAM并完成EVO评价
下载前10个序列的raw data(有真值)
00: 2011_10_03_drive_0027
01: 2011_10_03_drive_0042
02: 2011_10_03_drive_0034
03: 2011_09_26_drive_0067
04: 2011_09_30_drive_0016
05: 2011_09_30_drive_0018
06: 2011_09_30_drive_0020
07: 2011_09_30_drive_0027
08: 2011_09_30_drive_0028
09: 2011_09_30_drive_0033
10: 2011_09_30_drive_0034
下载calib,extract,sync的数据,默认解压后的目录存放格式如下,就可以
在“2011_09_30”的文件目录,运行:
kitti2bag -t 2011_09_30 -r 0018 raw_synced
行后会出现“kitti_2011_09_30_drive_0018_synced.bag”
注意:不要妄想通过路径选择“2011_09_30”文件夹
需安装kitti2bag
pip install pykitti
pip install kitti2bag
sudo pip install pandas==0.23.0 -i http://pypi.douban.com/simple/ --trusted-host pypi.douban.com
sudo pip install pykitti -i http://pypi.douban.com/simple --trusted-host pypi.douban.com
sudo pip install kitti2bag -i http://pypi.douban.com/simple --trusted-host pypi.douban.com
如果使用LIO-SAM作者的kitti2bag.py文件:
kitti2bag源程序
在liosam源码中:
config/doc/kitti2bag/kitti2bag.py
python3 kitti2bag.py -t 2011_09_30 -r 0018 raw_synced
测试的lio-sam修改后代码地址:
https://github.com/wwtx/lio_sam_kitti.git
需修改mapOptmization.cpp中的路径
std::ofstream pose2("/home/john/liosam_ws/save_trajectory/pose2.txt", std::ios::app);
std::ofstream pose1("/home/john/liosam_ws/save_trajectory/pose1.txt", std::ios::app);
运行:
source devel/setup.bash
roslaunch lio_sam kitti_run.launch
运行Rosbag的数据集:
rosbag play kitti_2011_09_30_drive_0018_synced.bag
结果:
source devel/setup.bash
rosservice call \
/lio_sam/save_map 0.2 \
"/liosam_ws/save_map/"
kitti数据集真值
安装evo
evo的安装可以参考evo安装与使用和EVO安装与问题解决,这里介绍快捷安装:
pip install evo --upgrade --no-binary evo
首先找到evo中的转换真值的程序
下载evo
在evo/contrib/kitti_poses_and_timestamps_to_trajectory.py
知道对应序列:
05: 2011_09_30_drive_0018
python3 \
kitti_poses_and_timestamps_to_trajectory.py \
poses/05.txt \
sequences/05/times.txt \
results/tum_05_gt.txt
查看路径:
evo_traj tum results/tum_05_gt.txt -p
10个全部转换的SHELL脚本
for i in {0..10}
do
if [ $i -le 9 ]; then
# python3 kitti_poses_and_timestamps_to_trajectory.py poses/0$i.txt sequences/0$i/times.txt sequences/0$i/tum_0${i}_gt.txt
python3 kitti_poses_and_timestamps_to_trajectory.py poses/0$i.txt sequences/0$i/times.txt results/tum_0${i}_gt.txt
else
# python3 kitti_poses_and_timestamps_to_trajectory.py poses/$i.txt sequences/$i/times.txt sequences/$i/tum_${i}_gt.txt
python3 kitti_poses_and_timestamps_to_trajectory.py poses/$i.txt sequences/$i/times.txt results/tum_${i}_gt.txt
fi
done
APE评价
evo_ape tum \
/home/john/rosbag/kitti_origin/dataset/results/tum_05_gt.txt \
/home/john/liosam_ws/save_trajectory/pose1.txt \
-r trans_part -va --plot --plot_mode xz \
--save_plot /home/john/rosbag/kitti_origin/dataset/plot_results/05/APE_plot.pdf \
--save_results /home/john/rosbag/kitti_origin/dataset/save_results/05/APE_result.zip
● evo_rpe:evo 工具包的一个子命令,用于计算相对姿态误差 (Relative Pose Error, RPE),这是分析SLAM/VO轨迹与参考轨迹之间误差的常用指标。
● tum:输入文件格式的类型,tum 表示 TUM 格式的轨迹文件。
● -r trans_part:指定计算RPE时使用的误差类型。在这里使用 trans_part,意味着只计算平移部分的误差,而不考虑旋转误差。
-r 参数用于指定误差计算的类型,默认情况下通常是 full_trans,也就是平移和旋转误差都会计算。
trans_part:仅计算平移误差(translation part),忽略旋转误差。
rot_part:仅计算旋转误差(rotation part),忽略平移误差。
full_trans(默认):计算平移和旋转误差,这是平移和旋转的组合误差。
● -va:表示启用详细模式 (verbose mode) 和所有统计信息 (all statistics),这将输出更详细的评估信息。
● --plot:生成轨迹的误差图表。
● --plot_mode xz:设置绘图模式为 xz 平面,通常这是俯视平面的轨迹显示模式,可以更直观地看到平面内的运动误差。
● --save_plot:指定保存生成的图表的文件路径。
● --save_results:指定保存分析结果的路径。
RPE评价
evo_rpe tum \
/home/john/rosbag/kitti_origin/dataset/results/tum_05_gt.txt \
/home/john/liosam_ws/save_trajectory/pose1.txt \
-r trans_part -va --plot --plot_mode xz \
--save_plot /home/john/rosbag/kitti_origin/dataset/plot_results/05/RPE_plot.pdf \
--save_results /home/john/rosbag/kitti_origin/dataset/save_results/05/RPE_result.zip
在 evo_ape 命令中,-r 参数用于指定误差类型,一般适用于整体轨迹的误差评估:
● rmse:计算均方根误差。
● mean:计算均值误差。
● median:计算中位数误差。
● std:计算标准差。
● min:计算最小误差。
● max:计算最大误差。
使用发现:evo_ape和evo_rpe的-r参数相同:
● -r full表示同时考虑旋转和平移误差得到的ape,无单位(unit-less)
● -r trans_part表示考虑平移部分得到的ape,单位为m;
● -r rot_part表示考虑旋转部分得到的ape,无单位(unit-less);
● -r angle_deg表示考虑旋转角得到的ape,单位°(deg);
● -r angle_rad表示考虑旋转角得到的ape,单位弧度(rad);
RES评价
evo_res \
/home/john/rosbag/kitti_origin/dataset/save_results/05/*.zip \
-p --use_filenames \
--save_table /home/john/rosbag/kitti_origin/dataset/table_results/05/RES_table.csv
–save_table /home/john/rosbag/kitti_origin/dataset/table_results/05/RES_table.csv
它不使用 -r 参数。
evo_res 主要依赖输入的结果文件并以指定格式输出。
轨迹输出
evo_traj tum \
/home/john/rosbag/kitti_origin/dataset/results/tum_05_gt.txt \
/home/john/liosam_ws/save_trajectory/pose1.txt \
--ref=/home/john/rosbag/kitti_origin/dataset/results/tum_05_gt.txt \
-p -a --plot_mode xz \
--save_plot /home/john/rosbag/kitti_origin/dataset/plot_results/05/TRA_plot.pdf
并不使用 -r 参数。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









