






一、简介
由于Avl-cruise软件没有履带模块,所以理论上是无法进行履带车的仿真的。然而最近由于学习需要,一直在寻找一种可以使用cruise软件进行履带式仿真的方法,在查阅论文和经过实验之后,确定了一种可以在cruise使用的履带式仿真模型的搭建方法,下面我就介绍一下这种方法。
二、原理
Cruise中没有针对履带车辆行驶装置的模型,因此用车轮模块替代主动轮模块,履带车和轮式车最大的不同就是履带的行驶效率,所以采用一个cruise里面的Flange模块来模拟履带装置的行驶效率,即在驱动轮的反方向施加一个大小为![]() 的作用力。在Function模块中,采取C-Function编写函数模拟反作用力的大小。根据式
的作用力。在Function模块中,采取C-Function编写函数模拟反作用力的大小。根据式![]() ,得到如下C函数关系式
,得到如下C函数关系式
y[0]=0.95-0.0017×a[0]×3.6r
y[1]=-a[1]×(1-y[0])/4
式中,y[0]为履带车辆行驶装置效率;a[0]为车轮转速; a[1]各车轮转矩;y[1]为Flange模块转矩。
在每一个车轮模块边连接Flange模块,并在信号连接时选择所需信号进行连接。通过上述过程可以实现履带车辆行驶装置效率的仿真。
三、仿真模型图
仿真模型图如下
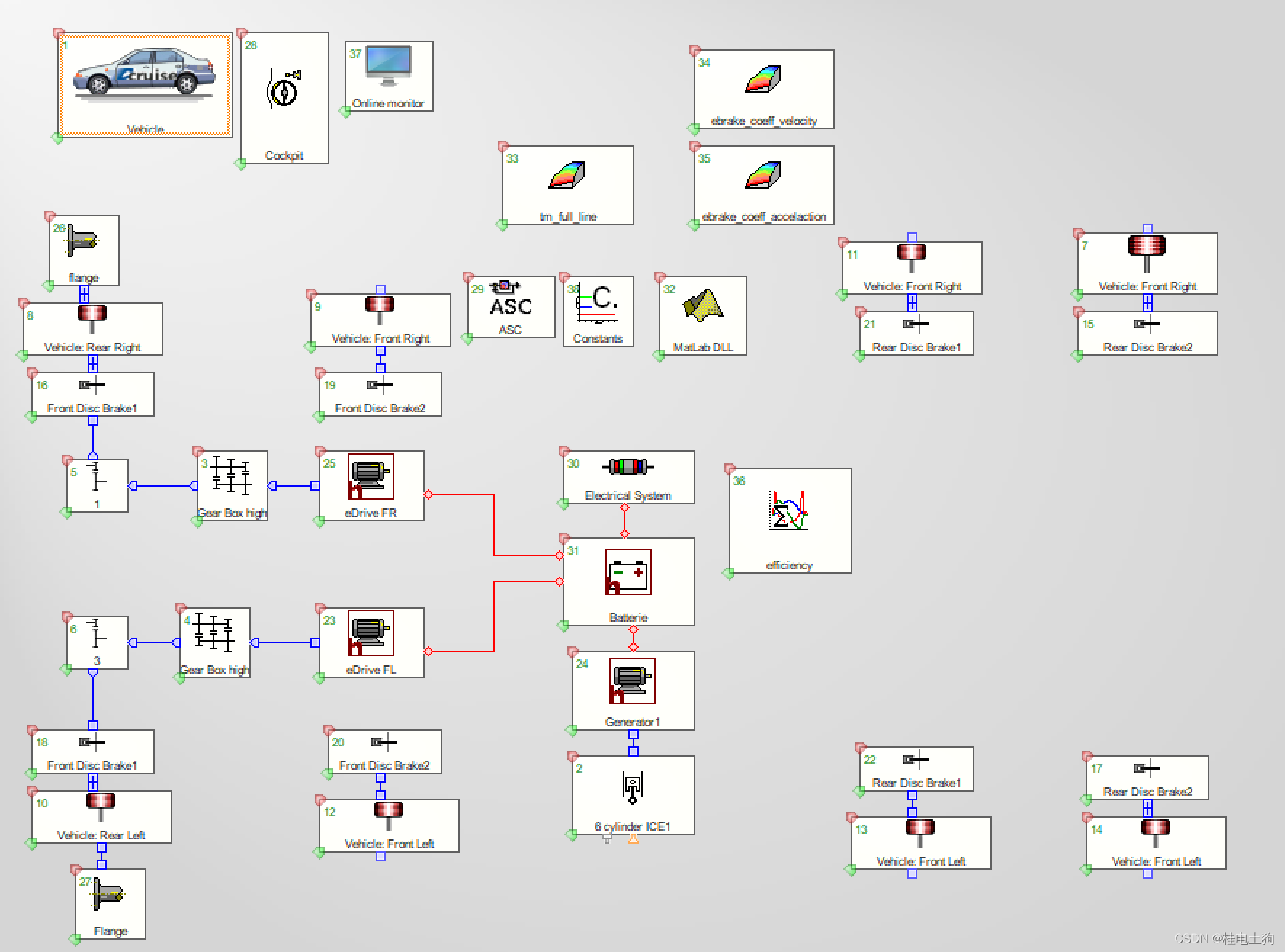
个人认为只需在主动轮附加Flange模块履带的行驶效率,图中我只在前两个主动轮加了。
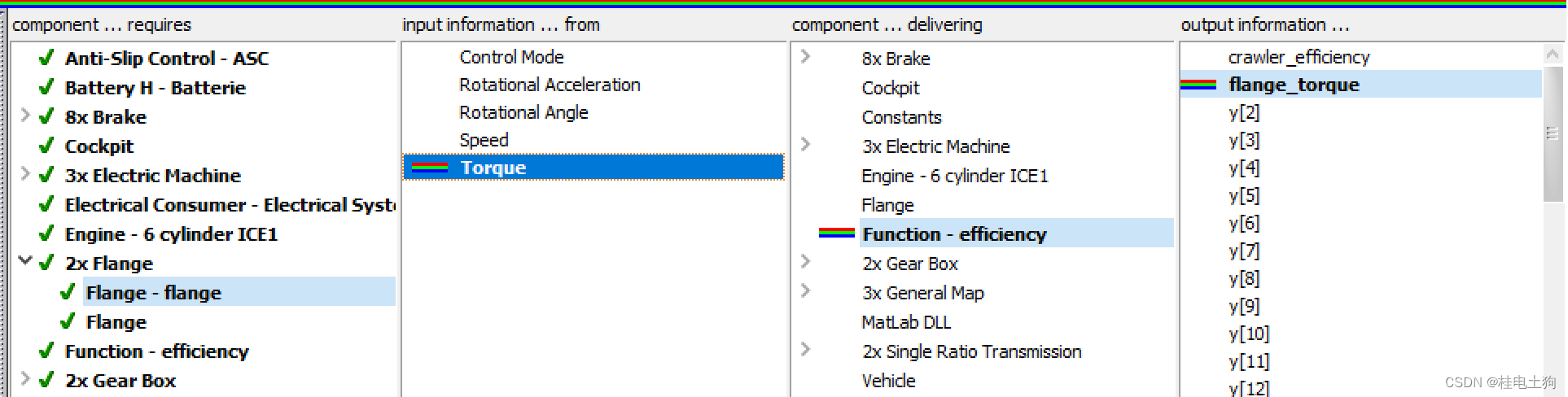
信号连接图如下

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









