




 本文深入解析EK算法(Edmonds-Karp算法),介绍了最大流问题及其核心思路,包括残留网络、增广路和增广路定理。通过示例详细解释了算法流程,展示了如何在图中寻找增广路径并更新边的容量,直至找到最大流。最后,给出了一个EK算法的C++实现代码。
本文深入解析EK算法(Edmonds-Karp算法),介绍了最大流问题及其核心思路,包括残留网络、增广路和增广路定理。通过示例详细解释了算法流程,展示了如何在图中寻找增广路径并更新边的容量,直至找到最大流。最后,给出了一个EK算法的C++实现代码。
EK求最大流
题目描述
核心思路
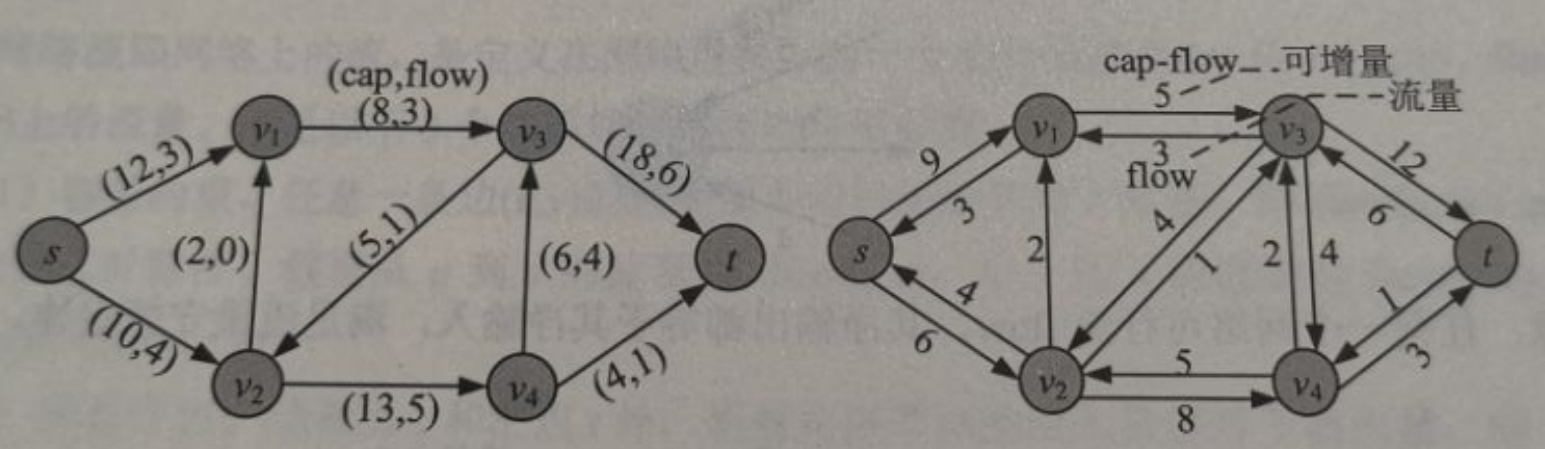
残留网络:残留网络G∗G^*G∗与原网络GGG的节点相同,GGG中的每条边都对应G∗G^*G∗中的一条或两条边。在残留网络中,与原网络对应的同向边是可增量(还可以增加多少流量),反向边是实际流量。
在残留网络中不显示0流量边,网络GGG及可行流对应的残留网络G∗G^*G∗如下图:
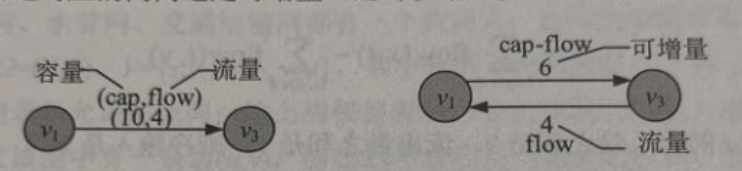
如下图所示,第一次从v1v_1v1到v3v_3v3流出了flow为6的流量,那么由于最大容量cap=10,那么下次还可以从v1v_1v1到v3v_3v3流出flow为10−6=410-6=410−6=4的流量。反向边是实际流量可以理解为:v1v_1v1后悔把6这个流量送给v3v_3v3了,然后v3v_3v3就又把6这个流量归还给了v1v_1v1。
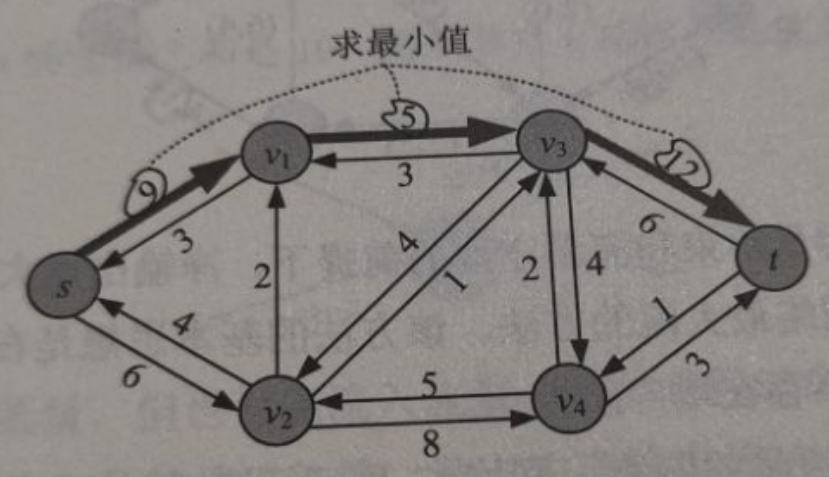
增广路是指残留网络上从源点SSS到汇点TTT的一条简单路径。增广量是指增广路径上每条边都可以增流的最小值。
如下图所示,s→v1→v3→ts\to v_1\to v_3\to ts→v1→v3→t就是一条增广路,增广量是这条增广路径上各边的最小值min(9,5,12)=5min(9,5,12)=5min(9,5,12)=5。为什么是取5而不是取9或者12呢?因为比如假设从源点SSS流出了流量9,但是由于v1→v3v_1\to v_3v1→v3这条水管最多承受流量5,因此当我们把流量9送到这条水管时,这条水管就爆了,不能运输水了,因此是取这条增广路径上各边的最小值。
增广路定理:设flowflowflow是网络GGG的一个可行流,如果不存在从源点到汇点的增广路,则flowflowflow是GGG的一个最大流。
增广路算法的基本思想:在残留网络中寻找增广路,然后在实流网络中沿增广路增流,在残留网络中沿增广路减流,重复以上步骤,直到不存在增广路时为止。此时,实流网络中的可行流就是所求的最大流。
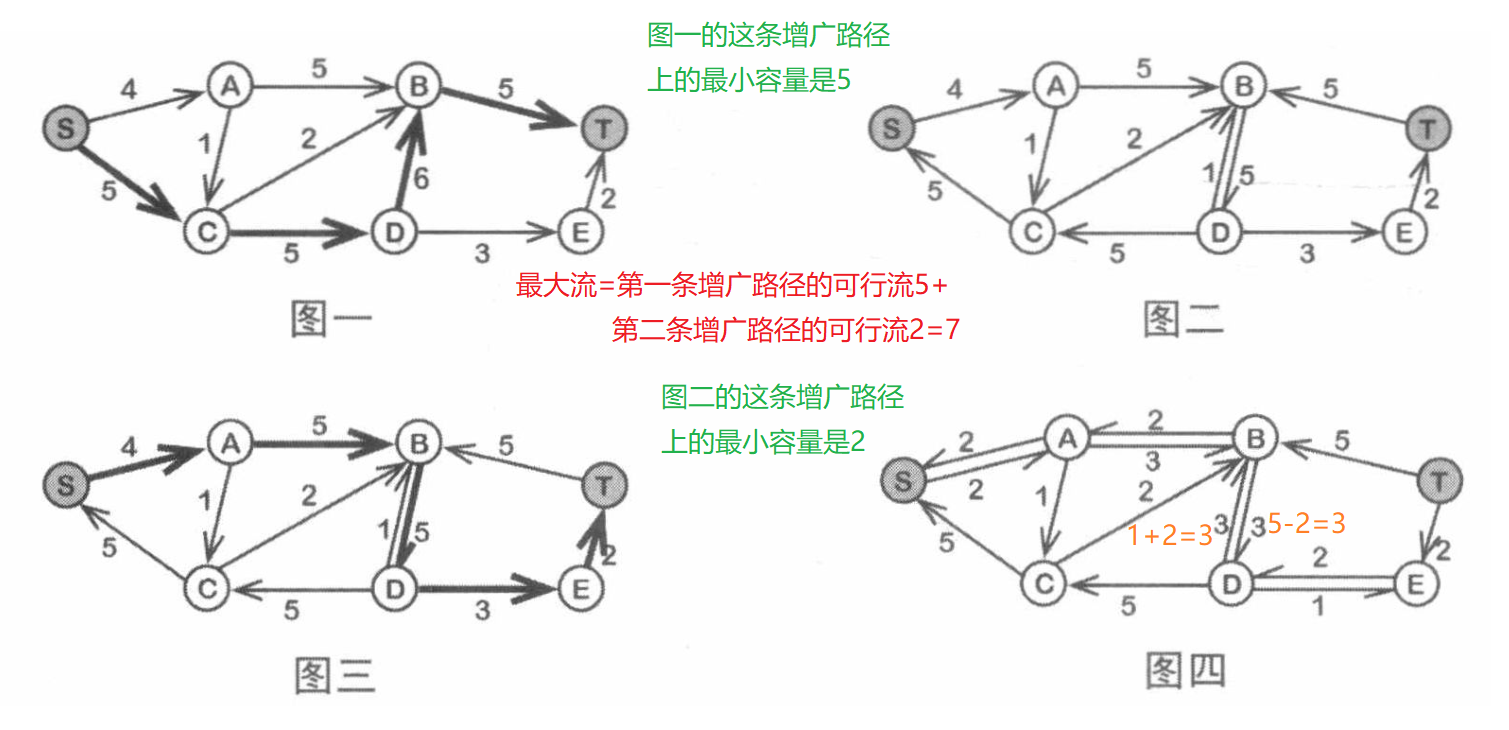
如上图所示。图一是原网络中每条边的初始容量。EK算法找到了流量为5的增广路S→C→D→B→TS\to C\to D\to B\to TS→C→D→B→T。于是在图二中,剩余容量对应发生了变化。接着,图三中,EK算法又找到了流量为2的增广路S→A→B→D→E→TS\to A\to B\to D\to E\to TS→A→B→D→E→T。最终在图四中,网络就不存在增广路了,最大流的大小就是5+2=75+2=75+2=7。图中省略了剩余容量为0的边。
问题:如何理解i=e[pre[i]^1]
如下图

啊
代码
#include<iostream>
#include<cstring>
#include<algorithm>
using namespace std;
const int N=1010,M=20010,INF=1e8;
int n,m,S,T;
//f是边上的容量
int h[N],e[M],ne[M],f[M],idx;
//q是宽搜存放点的队列
//d[i]=x表示从起点S到点i这条增广路上各边的最小剩余容量
//pre数组记录的前驱边而不是前驱点 比如pre[ver]=i表示节点ver是从边i走过来的
//即节点ver的前驱边是 边i
int q[N],d[N],pre[N];
//宽搜中判断某个点是否已经被访问过了
bool st[N];
void add(int a,int b,int c)
{
//正向边 初始化还没有流出流量 所以正向边课流出的容量保持不变 仍为c
e[idx]=b,f[idx]=c,ne[idx]=h[a],h[a]=idx++;
//反向边 初始化还没有流出流量 所以反向边没有流量 仍为0
e[idx]=a,f[idx]=0,ne[idx]=h[b],h[b]=idx++;
}
bool bfs()
{
memset(st,0,sizeof st);
int hh=0,tt=0;
//由于d是想要求最小 所以一般初始化为无穷大
q[0]=S,st[S]=true,d[S]=INF;
//进行宽搜
while(hh<=tt)
{
int t=q[hh++]; //取出队头元素
//遍历节点t的所有邻接点
for(int i=h[t];~i;i=ne[i]) //i是边
{
int ver=e[i];//ver是节点t的邻接点
//如果节点ver还没有被访问过 并且i这条边的容量仍然是大于0
if(!st[ver]&&f[i])
{
st[ver]=true;
//d[t]表示从起点到节点t这条增广路径上的各边中的最小剩余容量
//f[i]表示i这条边的容量
//d[ver]表示从起点S到点ver这条增广路上各边的最小剩余容量
d[ver]=min(d[t],f[i]);
//pre[ver]=i表示节点ver是从边i走过来的 即节点ver的前驱边是 边i
pre[ver]=i;
//如果走到了终点 则找到了一条从起点S到终点S且容量>0的增广路径
if(ver==T)
return true;
q[++tt]=ver;
}
}
}
//没有找到增广路径
return false;
}
int EK()
{
int maxflow=0; //最大流
//如果一直能找到增广路径 则一直寻找 同时累加每一条增广路径上的d[T]
//最终就是这张图的最大流
while(bfs())
{
//累加不同的增广路径上的d[T]
maxflow+=d[T];
//从终点T逆向到起点S 更新正向边和反向边的容量
for(int i=T;i!=S;i=e[pre[i]^1])
{
//由于已经流出了d[T],那么pre[i]这条边还可以流出f[pre[i]]-d[T]的流量
f[pre[i]]-=d[T]; //更新正向边的容量
f[pre[i]^1]+=d[T]; //更新反向边的容量
}
}
//到这里说明不能再找到一条增广路径了 那么此时就求出了最大流
return maxflow;
}
int main()
{
memset(h,-1,sizeof h);
scanf("%d%d%d%d",&n,&m,&S,&T);
while(m--)
{
int a,b,c;
scanf("%d%d%d",&a,&b,&c);
add(a,b,c);
}
printf("%d\n",EK());
return 0;
}



















 4485
4485

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











