







文章目录
在嵌入式开发中,经常会涉及到图像数据的传输与处理。本文将介绍如何使用 ESP32 采集图像数据并通过串口发送,以及使用 Python 程序接收和保存这些图像数据。
ESP32 端代码
首先,在 ESP32 的代码中,我们引入了相关的库和头文件,包括 esp_camera.h、FS.h、SD.h 和 SPI.h 等。
通过定义一些变量来记录拍摄时间、文件计数器以及相机和 SD 卡的状态。
关键的函数 photo_save 用于拍摄照片、保存到 SD 卡,并通过串口发送图像数据。在发送时,先发送 START_JPEG 标记,然后发送图像数据,最后发送 END_JPEG 标记。
writeFile 函数用于将图像数据写入 SD 卡文件。
在 setup 函数中,进行了串口、相机和 SD 卡的初始化设置。
loop 函数中,当相机和 SD 卡都准备好时,每隔一分钟拍摄一张照片并进行处理。
#include "esp_camera.h"
#include "FS.h"
#include "SD.h"
#include "SPI.h"
#define CAMERA_MODEL_XIAO_ESP32S3 // Has PSRAM
#include "camera_pins.h"
unsigned long lastCaptureTime = 0; // Last shooting time
int imageCount = 1; // File Counter
bool camera_sign = false; // Check camera status
bool sd_sign = false; // Check sd status
// 新增UART相关配置
#define UART_TX_PIN GPIO_NUM_43 // 根据实际硬件连接修改
#define UART_RX_PIN GPIO_NUM_44 // 根据实际硬件连接修改
#define UART_BAUD_RATE 115200
// Save pictures to SD card and send via UART
void photo_save(const char * fileName) {
// Take a photo
camera_fb_t *fb = esp_camera_fb_get();
if (!fb) {
Serial.println("Failed to get camera frame buffer");
return;
}
// Save photo to file
writeFile(SD, fileName, fb->buf, fb->len);
// Send image data via UART
// Serial1.write((uint8_t *)fb->buf, fb->len); // 发送图像数据
// Serial1.write("START_JPEG");
// Serial1.write((uint8_t *)fb->buf, fb->len);
// Serial1.write("END_JPEG");
Serial1.write((uint8_t *)"START_JPEG", 10); // 发送 START_JPEG 标记
Serial1.write((uint8_t *)fb->buf, fb->len); // 发送图像数据
Serial1.write((uint8_t *)"END_JPEG", 8); // 发送 END_JPEG 标记
Serial.println("Photo saved to file and sent via UART");
// Release image buffer
esp_camera_fb_return(fb);
}
// SD card write file
void writeFile(fs::FS &fs, const char * path, uint8_t * data, size_t len){
Serial.printf("Writing file: %s\r\n", path);
File file = fs.open(path, FILE_WRITE);
if(!file){
Serial.println("Failed to open file for writing");
return;
}
if(file.write(data, len) == len){
Serial.println("File written");
} else {
Serial.println("Write failed");
}
file.close();
}
void setup() {
Serial.begin(115200);
while(!Serial); // When the serial monitor is turned on, the program starts to execute
Serial1.begin(UART_BAUD_RATE, SERIAL_8N1, UART_RX_PIN, UART_TX_PIN); // 使用GPIO44(RX), GPIO43(TX)
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.frame_size = FRAMESIZE_UXGA;
config.pixel_format = PIXFORMAT_JPEG; // for streaming
config.grab_mode = CAMERA_GRAB_WHEN_EMPTY;
config.fb_location = CAMERA_FB_IN_PSRAM;
config.jpeg_quality = 12;
config.fb_count = 1;
// if PSRAM IC present, init with UXGA resolution and higher JPEG quality
// for larger pre-allocated frame buffer.
if(config.pixel_format == PIXFORMAT_JPEG){
if(psramFound()){
config.jpeg_quality = 10;
config.fb_count = 2;
config.grab_mode = CAMERA_GRAB_LATEST;
} else {
// Limit the frame size when PSRAM is not available
config.frame_size = FRAMESIZE_SVGA;
config.fb_location = CAMERA_FB_IN_DRAM;
}
} else {
// Best option for face detection/recognition
config.frame_size = FRAMESIZE_240X240;
#if CONFIG_IDF_TARGET_ESP32S3
config.fb_count = 2;
#endif
}
// camera init
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed with error 0x%x", err);
return;
}
camera_sign = true; // Camera initialization check passes
// Initialize SD card
if(!SD.begin(21)){
Serial.println("Card Mount Failed");
return;
}
uint8_t cardType = SD.cardType();
// Determine if the type of SD card is available
if(cardType == CARD_NONE){
Serial.println("No SD card attached");
return;
}
Serial.print("SD Card Type: ");
if(cardType == CARD_MMC){
Serial.println("MMC");
} else if(cardType == CARD_SD){
Serial.println("SDSC");
} else if(cardType == CARD_SDHC){
Serial.println("SDHC");
} else {
Serial.println("UNKNOWN");
}
sd_sign = true; // sd initialization check passes
Serial.println("Photos will begin in one minute, please be ready.");
}
void loop() {
// Camera & SD available, start taking pictures
if(camera_sign && sd_sign){
// Get the current time
unsigned long now = millis();
// If it has been more than 1 minute since the last shot, take a picture and save it to the SD card
if ((now - lastCaptureTime) >= 6000) {
char filename[32];
sprintf(filename, "/image%d.jpg", imageCount);
photo_save(filename);
Serial.printf("Saved picture: %s\r\n", filename);
Serial.println("Photos will begin in one minute, please be ready.");
imageCount++;
lastCaptureTime = now;
}
}
}
Python 端代码
在 Python 代码中,首先配置串口参数,包括端口、波特率和超时时间。
定义了图像的起始和结束标记。
通过 serial.Serial 打开串口。
image_data 用于存储图像数据缓冲区。
save_image 函数用于将接收到的图像数据保存为文件。
read_serial 函数不断从串口读取数据,将数据追加到缓冲区,然后检查是否接收到完整的图像数据,提取并保存图像,清除已处理的数据。
import serial
import time
# 配置串口参数
SERIAL_PORT = 'COM7' # 根据实际连接修改
BAUD_RATE = 115200 # 波特率,与 Arduino 的 UART_BAUD_RATE 一致
TIMEOUT = 3 # 超时时间(秒)
# 图像起始和结束标记
START_MARKER = b"START_JPEG"
END_MARKER = b"END_JPEG"
# 打开串口
try:
ser = serial.Serial(SERIAL_PORT, BAUD_RATE, timeout=TIMEOUT) # 设置buffer很大
print(f"Serial port {SERIAL_PORT} opened successfully.")
except Exception as e:
print(f"Failed to open serial port: {e}")
exit(1)
# 图像数据缓冲区
image_data = bytearray()
# 文件计数器
file_count = 1
def save_image(data):
"""将接收到的图像数据保存为文件"""
global file_count
filename = f"received_image_{file_count}.jpg"
with open(filename, "wb") as f:
f.write(data)
print(f"Image saved as {filename}")
file_count += 1
def read_serial():
"""从串口读取数据并处理"""
global image_data
try:
while True:
# 读取串口数据
chunk = ser.read(ser.in_waiting or 1) # 读取当前可用的所有字节
# 读取串口的所有数据
if not chunk:
continue
# 将数据追加到缓冲区
image_data.extend(chunk)
# print(f"Buffer content: {len(image_data)}")
# 检查是否接收到完整的图像数据
while True:
start_index = image_data.find(START_MARKER) # 查找起始标记
end_index = image_data.find(END_MARKER) # 查找结束标记
# 如果start_index > end_index,说明开始的图像数据被截断,直接丢弃
if start_index != -1 and end_index != -1 and start_index > end_index:
print(f"invaild data, discarding, from {start_index} start to {end_index} end")
image_data = image_data[start_index:]
start_index = 0
end_index = -1
t1 = time.time()
# 提取图像
if start_index != -1 and end_index != -1 and end_index > start_index:
# 提取完整的 JPEG 数据(去掉起始和结束标记)
jpeg_start = start_index + len(START_MARKER)
jpeg_end = end_index
complete_image = image_data[jpeg_start:jpeg_end]
# 保存图像
save_image(complete_image)
print(f"Received complete image, size: {len(complete_image)}, cost time: {1000*(time.time() - t1):.2f} ms")
# 清除已处理的数据(包括 START_JPEG 之前的所有数据)
image_data = image_data[end_index + len(END_MARKER):]
start_index = -1
end_index = -1
t1 = time.time() # 重置计时器
else:
break
except KeyboardInterrupt:
print("Program terminated by user.")
finally:
ser.close()
print("Serial port closed.")
if __name__ == "__main__":
print("Waiting for image data from Arduino...")
read_serial()
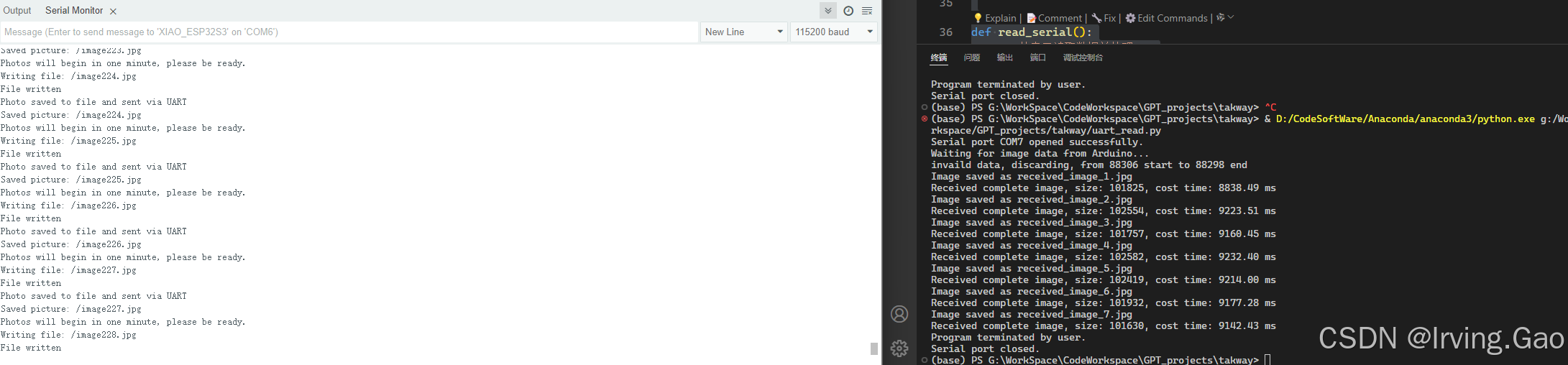
运行结果
Arduino 端输出了照片保存和发送的相关信息。
Python 端成功打开串口,接收到图像数据并保存为文件,输出了保存图像的相关信息,包括文件名、大小和处理时间等。
通过这样的方式,实现了 ESP32 与 Python 之间的图像数据传输和处理,为相关的嵌入式应用提供了一种可行的解决方案。
希望本文能对您在串口图像数据传输方面的开发有所帮助。

















 705
705

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









