




 合成孔径雷达干涉测量(InSAR)用于观测地球表面,但受大气显著影响。本文介绍了大气效应对InSAR的原理,讨论了大气效应特性,如各向异性、非高斯分布、频谱幂律分布等,还回顾了多种减轻大气效应的方法,包括基于外部数据和数据分析的方法。
合成孔径雷达干涉测量(InSAR)用于观测地球表面,但受大气显著影响。本文介绍了大气效应对InSAR的原理,讨论了大气效应特性,如各向异性、非高斯分布、频谱幂律分布等,还回顾了多种减轻大气效应的方法,包括基于外部数据和数据分析的方法。
文章目录
- Abstract
- Introduction
- Repeat-Pass SAR Interferometry(InSAR)
- The Atmosphere and its Effects on Repeat-Pass InSAR
- Properties of Atmospheric Signals in SAR Interferograms
- Mitigation of Atmospheric Effects on Repeat-Pass InSAR
-
- Correction of Atmospheric Effects based on External data(利用外部数据)
-
- Correction of atmospheric effects based on ground meteorological observations(地面气象观测)
- Correction of atmospheric effects based on GPS observations(GPS观测)
- Correction of atmospheric effects based on high-resolution meteorological models(高分辨率气象模型?——数值模拟)
- Correction of atmospheric effects based on MODIS data(MODIS数据)
- Correction of atmospheric effects based on MERIS data(MERIS 数据)
- Correction of Atmospheric Effects based on Correlation Analysis(相关分析)
- Correction of Atmospheric Effects based on Pair-Wise Logic(成对逻辑,线性组合)
- Correction of Atmospheric Effects based on PSInSAR Technique(PS-InSAR)
- Reduction of Atmospheric Effects with the Stacking Method(叠加,stacking)
- Conclusion
Abstract
合成孔径雷达干涉测量(InSAR)是一种强大的技术,用于观测地球表面,特别是用于绘制地球的地形和变形。然而,InSAR测量往往受大气的显著影响,因为雷达信号穿过大气层传播,而大气的状态在空间和时间上都有变化。近年来,人们为了更好地了解大气效应的特性并开发方法来减轻这些影响而做出了巨大努力。本文系统地回顾了在这一领域开展的工作。首先介绍了大气效应对重复通过InSAR的基本原理。然后讨论了关于大气效应特性的研究,包括在世界各地确定的效应大小、大气效应的频谱、各向同性特性和效应的统计分布。接着回顾了为减轻大气效应而开发的各种方法,包括基于PSInSAR处理的方法、基于干涉图建模的方法,以及基于GPS观测、地面气象数据和MODIS和MERIS等卫星数据的外部数据的方法。还给出了分别使用MODIS和MERIS数据来校准InSAR大气效应的两个示例。
Introduction
(1)InSAR很优秀-应用广泛
(2)大气误差
SAR的局限性在于大气层对信号的影像,主要是对流层和电离层。
对流层:信号(电磁波)在穿过对流层时会被延迟(削弱),对流层效应限制InSAR技术的应用
电离层:信号(电磁波)在穿过电离层时会被加速(促进),电离层的天顶误差(zenith ionospheric range error)与总电子含量(TEC)成正比。电离层是一种色散介质,作用强弱与波长的平方成正比。
色散介质:电磁波通过时介质对不同频率的电磁波具有不同的传播速度,从而导致信号的频率分离
非色散介质:介质对不同频率的电磁波具有相同的传播速度,不会导致信号频率的分离
(3)这篇文章的主要工作
讨论对流层对InSAR的影响。
大气延迟的原理——研究结果——研究方法
Repeat-Pass SAR Interferometry(InSAR)
(1)讨论重复轨道的InSAR
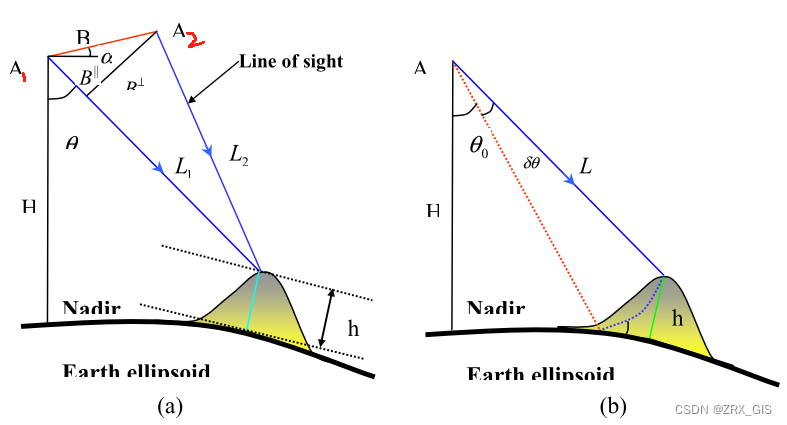
(2)上图中A1和A2分别表示两次采集对应的雷达平台位置,两个位置的相位可表示为
L1和L2分别表示对应的斜距,λ是雷达信号的波长,干涉相位可以表示为
Q1:公式中为什么是第一个位置的相位减去第二个位置的相位,反过来写行不行?
干涉相位近似可以取值为

α是基线的方向角,θ是入射角
(3)如果地面没起伏(就是入射到了椭球面),可以按照模型b表示为
如果地面有起伏,则会增加一个偏角
联立上面两个式子就可以得到椭球相位

地形高度h与偏角的关系也可以通过几何看出为
因此h可以计算为
上述是建立在地表在两次采样时不发生变化的情况下开展的,DInSAR是用来测量两次间形变的技术。
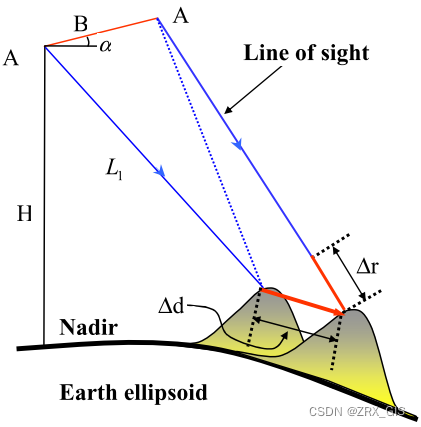
如上图,我们对一次地表形变建模,d表示地表位移,r表示位移在LOS向的投影。
位移会在干涉相位中有所反应,这种变化与LOS向的形变成比例:
因此,干涉相位包括topography information和deformation information

为了绘制两次SAR的地标性变,必须去除地形影响,DInSAR常用方式包括【1】二轨+DEM【2】三轨【3】四轨。
常用的是二轨+DEM,在计算中,基于DEM和干涉图的集合成像来模拟SAR干涉图(生成地形干涉图),并将其从形变干涉图中去除,三轨和四轨中,地形和形变干涉图都是从SAR图像中生成的,他们惟一的区别在于,在三轨中一个图像由地形和形变干涉图共享。
干涉相位中还包括轨道相位(轨道误差引起的线性相位斜坡)。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2832
2832

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











