






 本文总结了一年的目标检测学习经验,涵盖了深度学习中的目标检测、实例分割、语义分割和场景分类等领域。深度学习与传统机器学习的区别、发展历程以及在图像处理中的应用进行了阐述。特别讨论了目标检测网络的分类,如one-stage、two-stage、anchor-based和anchor-free,并介绍了各类网络的优缺点。此外,还提及了anchor-free网络的两个子类:anchor-point和keypoint。文章通过图表清晰地展示了不同检测网络的分类。
本文总结了一年的目标检测学习经验,涵盖了深度学习中的目标检测、实例分割、语义分割和场景分类等领域。深度学习与传统机器学习的区别、发展历程以及在图像处理中的应用进行了阐述。特别讨论了目标检测网络的分类,如one-stage、two-stage、anchor-based和anchor-free,并介绍了各类网络的优缺点。此外,还提及了anchor-free网络的两个子类:anchor-point和keypoint。文章通过图表清晰地展示了不同检测网络的分类。
学习目标检测有一年了,从论文学习到工程实践,个人的认识得到了一定提升,大致总结一下。
目标检测是深度学习的图像处理一个方向,还有其他方向比如实例分割(找出目标并得到掩膜)、语义分割(每一个像素属于什么类别)、场景分类(哪一类即可,比较简单)。
深度学习是机器学习的一个发展方向,机器学习的里一个方向就是传统的机器学习,使用支持向量机等方法。而机器学习是被包含于人工智能方向的。
深度学习的发展可以追溯到神经元的研究,但是两者并没有实际的关联。因为深度学习的深度网络的学习能力本质上就是学习一种复杂的映射关系,就相当于构造一个复杂的黑盒子函数可以实现某种想要达到的映射关系,把它应用到实际生活中,给人类的生活带来便利。
目标检测网络从卷积神经网络的提出,发展进步非常快。
这些网络根据它们的特点可以大致分类成:one-stage,two-stage;anchor-based,anchor-free;anchor-free又还可以分为anchor point和key point.
one-stage,two-stage的划分标准是根据网络是否包含rpn模块产生anchor,faster rcnn,mask rcnn等是two-stage网络,这类网络精度高,因为产生的anchor进行了筛选工作,也正因此,检测速度比一阶段更慢。one-stage网络包含SSD、YOLO系列等,没有rpn模块,从特征图上直接产生候选区域/锚框(anchor)进行分类回归,检测速度较快,但是检测精度较低。
anchor-based和anchor-free的分类是依据是否产生锚框(anchor)来判断。
我做了一个图来总结了一下网络的分类。
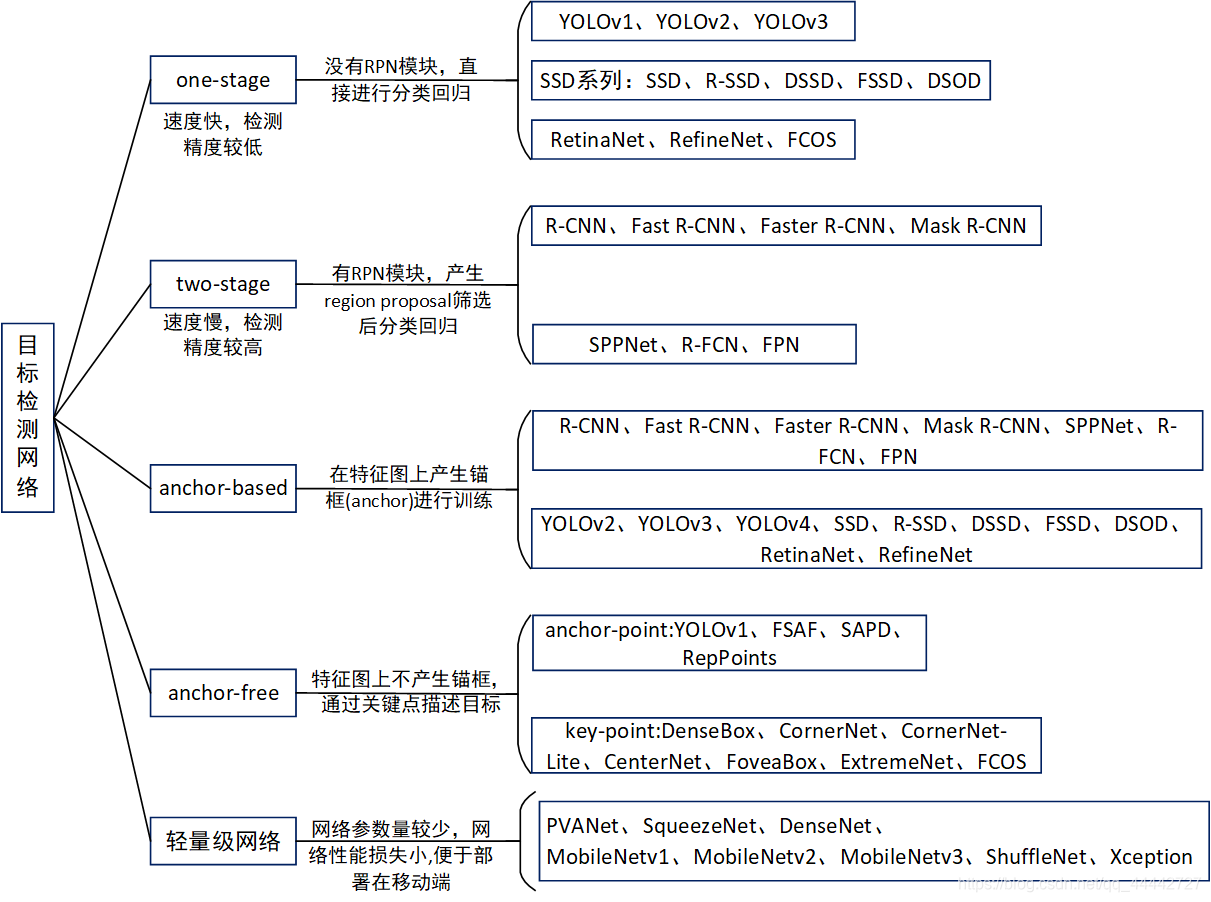
anchor free网络分类标准anchor-point和key-point并不明确,只能确定是anchor-free网络。


















 1173
1173

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











