




 本文详细解读MHT(Multiple Hypothesis Tracking)算法中的FormTrackFamily部分,包括整体思路和代码实现。核心内容涉及轨道形成与维护、轨迹分数LLR的确认与删除策略、门控技术,以及轨迹修剪逻辑。通过实例解析,阐述如何用门控减少计算,并介绍MHT中轨迹的确认、删除和修剪条件。
本文详细解读MHT(Multiple Hypothesis Tracking)算法中的FormTrackFamily部分,包括整体思路和代码实现。核心内容涉及轨道形成与维护、轨迹分数LLR的确认与删除策略、门控技术,以及轨迹修剪逻辑。通过实例解析,阐述如何用门控减少计算,并介绍MHT中轨迹的确认、删除和修剪条件。
MHT代码阅读(1)
1. FormTrackFamily
1.1 整体思路
轨道形成和维护:表示维护所有轨道的中央轨道文件以及在这些轨道上执行的操作
-
接收新的观测值
-
用轨迹分数(LLR)确认和删除轨迹、用门控技术减少后期计算
-
轨迹分数LLR
-
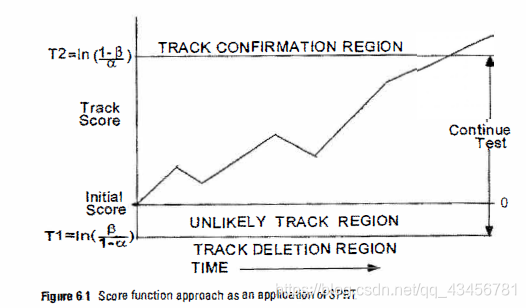
利用轨迹分数来确认和删除是经典的SPRT方法的应用,SPRT中将LLR当作轨迹分数。如图6-1,LLR(或者分数L),在跟阈值T1、T2相比较。
-
当L大于T2:宣布追踪确认
-
当L在T1、T2之间:继续测试
-
当L小于T1:删除轨迹
-
-
门控
- 一种计算效率高的方法是首先使用粗略形式的门控,例如分箱。 使用分箱方法,测量空间被划分为一个单元格(或分箱)网格。然后,一条轨迹只与它的分箱和相邻分箱中的观测值进行比较。 可以根据轨道质量和可用计算资源自适应地选择箱大小
- 使用门内的所有观察更新现有轨迹,并形成外推轨迹(未使用任何当前观察更新)。此外,基本上所有观测都用于形成新轨迹的第一个点。因此,可能形成大量轨迹并且许多轨迹是不一致的,因为相同的观测被用于多个轨迹。
- 当轨道没有共同的观察时,轨道被定义为兼容。通过在每次扫描之间保持先前不兼容的结果,可以实现效率的显着提高。因此,实际上对于每个轨道都有一个与该轨道不兼容的轨道列表。这种不兼容性会传递给从父轨道产生的后代轨道。
- 在MHT 中,门控的目的只是为了从进一步处理中消除极不可能的替代方案。
- 在 MHT中,通常选择更大的门,并使用 MHT 轨道修剪逻辑 来消除 不太可能的潜在轨道分支。
-
1.2 代码实现
-
初始化卡尔曼滤波矩阵
-
形成一个新的轨迹
- 设置ct存放当前观测数据
- 进入循环
- 初始化轨迹分数LLR
- 初始化状态向量
- 构建stateTreeSet结构体,用于存放tree,每个tree中包含Node和parent,Node是个元胞数组,存放的第一列是状态向量,后四列是协方差矩阵。
- 初始化scoreTreeSet(树的分数集合)、idTreeSet(树的编号集合)、activeTreeSet(活跃的树的集合)、obsMembership{i}(观察成员之间的关系)、familyID(集群编号)、trackID(轨迹编号)
-
用新的观察或者虚拟观察来更新轨迹
-
初始化treeDel=[](要删除的树)、treeConfirmed=[](保留的树)
-
进入外循环
-
ct1存储已确认轨迹中较差的将要被修剪的轨迹的数量
ct2存储已确认轨迹中好的无需修剪的轨迹数量
-
进入内循环
- 确认轨迹是否是活跃的,不活动的树枝保存在tabuList,这些树枝将不参与繁殖
- 用虚拟观察更新轨迹
- 当某轨迹没有被确认时
- 与other_param.dummyNumberTH比较,是在main中就设置好的阈值,意思是当我们遇到一个点观测不清楚,我们最多可以再继续观测次数不能超过这个阈值,如果连续观察次数超过阈值都无法准确观察,那么就将这个树废除。
- 当观察的数量不为0时
- 如果轨迹没有确认,那么继续用一个新的观察更新它(这一步相当于重复上一步)
- 保存观察成员的关系以加速 updateICL 函数
- 如果轨迹确认了,但是轨迹不够好,那么ct1+1
- confscTH:确认轨道修剪(MOT)。 平均检测置信度分数低于此阈值的已确认轨迹将被忽略。
- dummyRatioTH:基于虚拟观察数量与总观察数量的比率确认轨迹修剪,大于这个大于这个比率将会被忽略
- 如果轨迹确认了,并且足够好,那么ct2+1
- 如果轨迹没有确认,那么继续用一个新的观察更新它(这一步相当于重复上一步)
-
退出内循环
-
-
最终判断树是被删除、确认还是修剪
- 轨迹删除
- 对于刚确认的轨迹,如果这棵树的所有track的置信度都小于阈值,这棵树死亡
- 轨迹确认
- 确认轨迹的条件:轨迹所在的树只有这一条轨迹、这条轨迹置信度大于阈值、连续TH次miss
- 轨迹修剪
- 根据其分数修剪轨道分支
- 轨迹删除
-
1.3 附录代码
function [obsTreeSetNew,stateTreeSetNew,scoreTreeSetNew,idTreeSetNew,...
activeTreeSetNew,obsTreeSetConfirmed,stateTreeSetConfirmed,...
scoreTreeSetConfirmed,activeTreeSetConfirmed,familyID,trackID,treeDel,...
treeConfirmed,obsMembership]=formTrackFamily(obsTreeSetPrev,...
stateTreeSetPrev,scoreTreeSetPrev,idTreeSetPrev,activeTreeSetPrev, ...
obsTreeSetConfirmed,stateTreeSetConfirmed,scoreTreeSetConfirmed,activeTreeSetConfirmed,...
selectedTrackIDs,cur_observation,kalman_param,other_param,familyID,trackID,cur_time,dt,Mea)
---------------------------------------------------------------------------------------------------------------------------
observationNo=length(cur_observation.x);
familyNo=length(obsTreeSetPrev);
fai=[1 dt 0 0; %dt采样周期
0 1 0 0;
0 0 1 dt;
0 0 0 1];
qx=kalman_param.qx;
qy=kalman_param.qy;
%qf=kalman_param.qf;
kalman_Q_adjusted=[qx*dt^3/3 qx*dt^2/2 0 0;
qx*dt^2/2 qx*dt 0 0;
0 0 qy*dt^3/3 qy*dt^2/2;
0 0 qy*dt^2/2 qy*dt]; %这是kalman的过程噪声矩阵
%sen=cur_observation.sen;
if observationNo ~= 0 % ~=是不等于
obsTreeSet(observationNo,1)=tree;
stateTreeSet(observationNo,1)=tree;
scoreTreeSet(observationNo,1)=tree;
idTreeSet(observationNo,1)=tree;
activeTreeSet(observationNo,1 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 790
790

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











