







 本文探讨相机内参的理论,从相机坐标系到像素坐标系的转换,分析机械参数、Resize和Crop如何影响内参。内容涉及相机坐标系、成像坐标系、像素坐标系的变换,以及焦距、坐标缩放和原点位置对内参的影响。同时指出,图像处理操作如Resize和Crop仅影响变换矩阵,而非实际相机参数。
本文探讨相机内参的理论,从相机坐标系到像素坐标系的转换,分析机械参数、Resize和Crop如何影响内参。内容涉及相机坐标系、成像坐标系、像素坐标系的变换,以及焦距、坐标缩放和原点位置对内参的影响。同时指出,图像处理操作如Resize和Crop仅影响变换矩阵,而非实际相机参数。
目录
理论推导之从相机坐标系到像素坐标系
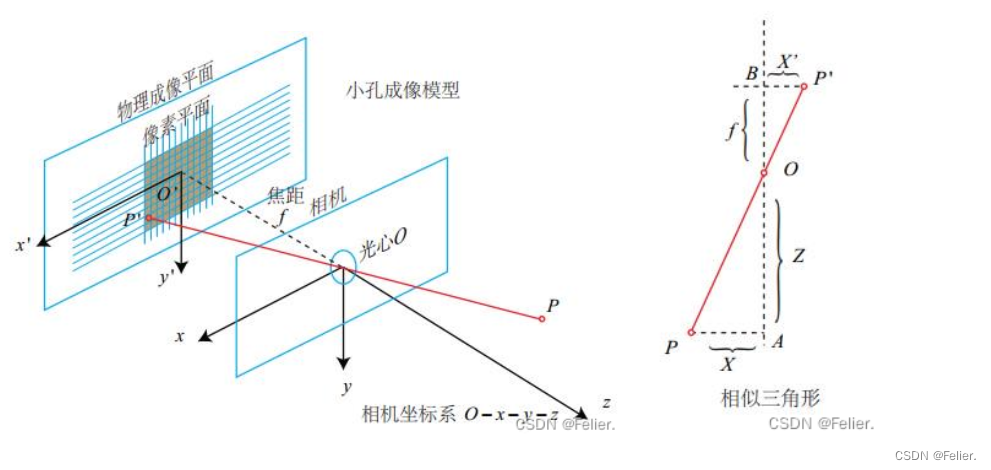
相机内参的意义即从相机坐标系到像素坐标系的表达,其中共涉及到三个坐标系:相机坐标系、成像坐标系、像素坐标系,其中进相机坐标系为3维坐标系,其他为平面坐标。如下图,引用了网络上常见的图例来推导其中的坐标变换。
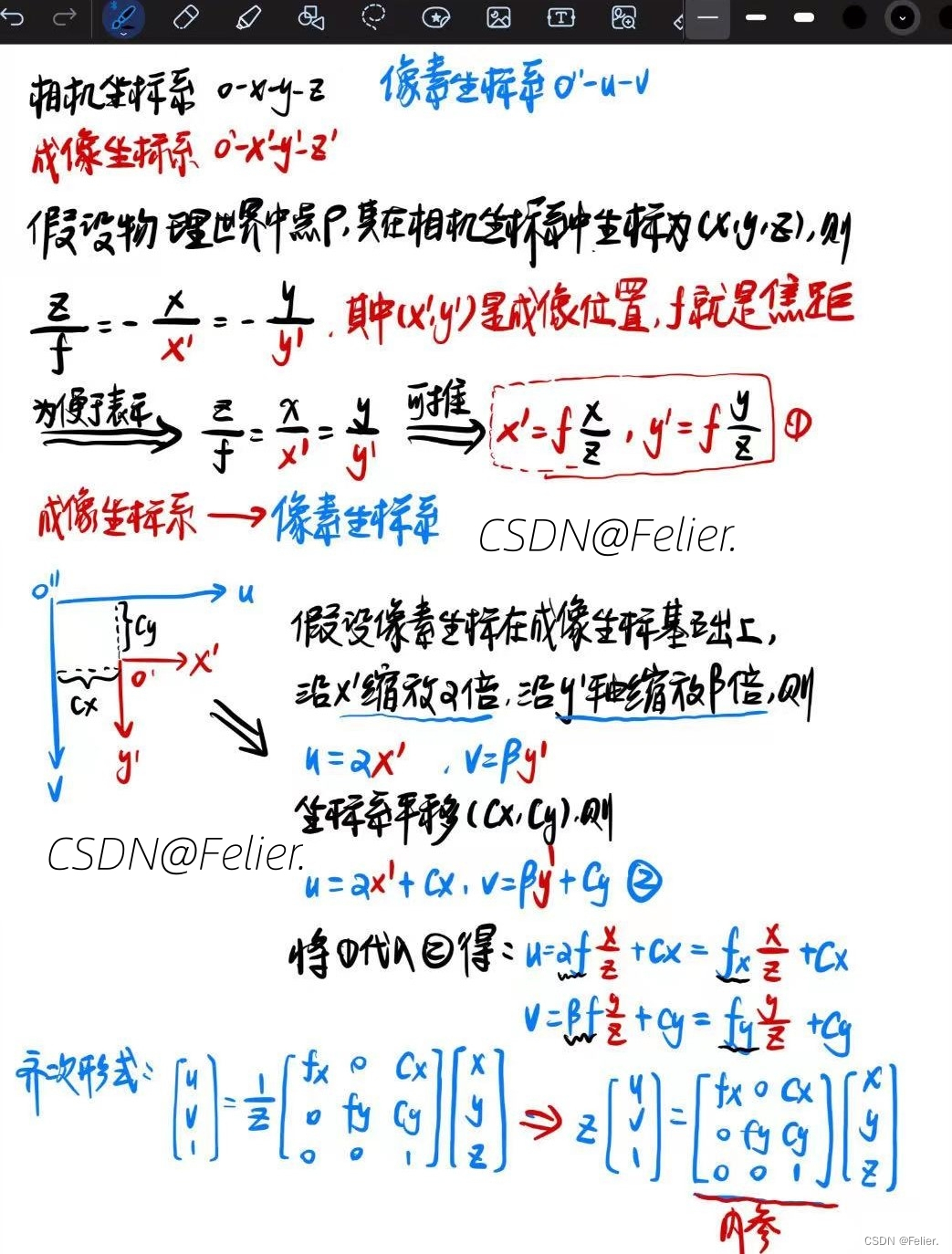
如下图所示即为相机内参的详细推导过程。其中第四行中的负号其实是根据小孔成像的倒立原理形成的,而后面我们为了表示方便,同时也是统一两个平面坐标系的方向又取消掉了负号,最终推得了内参的表示形式。
目录
相机内参的意义即从相机坐标系到像素坐标系的表达,其中共涉及到三个坐标系:相机坐标系、成像坐标系、像素坐标系,其中进相机坐标系为3维坐标系,其他为平面坐标。如下图,引用了网络上常见的图例来推导其中的坐标变换。
如下图所示即为相机内参的详细推导过程。其中第四行中的负号其实是根据小孔成像的倒立原理形成的,而后面我们为了表示方便,同时也是统一两个平面坐标系的方向又取消掉了负号,最终推得了内参的表示形式。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


























