







1.模板匹配(Template Match)
模板匹配介绍
相关API演示
代码演示
2.模板匹配
- 介绍
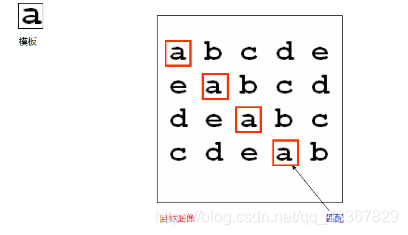
- 模板匹配就是在整个图像区域发现与给定子图像匹配的小块区域。
- 所以模板匹配首先需要一个模板图像T(给定的子 图像)
- 另外需要一个待检测的图像-源图像S
- 工作方法,在带检测图像上,从左到右,从上向下计算模板图像与重叠子图像的匹配度,匹配程度越大,两者相同的可能性越大。
3.模板匹配介绍——匹配算法介绍
opencv提供了六种常见的匹配算法
- 计算平方不同

- 计算相关性

- 计算相关系数


(下面归一化的三种方法) - 计算归一化平方不同

值越小,相关性越大
- 计算归一化相关性

值越大,相关性越大
- 计算归一化相关系数

上诉公式在opencv中的表示方法

4.相关API介绍
4.1
matchTemplate(
InputAurry image,//源图像,必须是8-bit或者32-bit浮点数图像
InputAurry templ,//模板图像,类型必须与输入图像一样
OutputArray result,//输出结果,必须是单通道32为浮点数,
//假设源图像W*H,模板图像w*h,则结果必须为W-w+1,H-h+1的大小
int method,//使用的匹配方法
InputArrray mask=noArray()
)
4.2 模板匹配的方法
enum cv::TemplateMatchModes{
cv::TM_SQDIFF=0;
cv::TM_SQDIFF_NORMED=1;
cv::TM_CCORR=2;
cv::TM_CCORR_NORMED=3;
cv::TM_CCOEFF=4;
cv::TM_CCOEFF_NORMED=5;
}
4.3 minMaxLoc()函数
- 查找全局最小和最大数组元素并返回它们的值和它们的位置。
void minMaxLoc(InputArray src,
CV_OUT double* minVal,
CV_OUT double* maxVal=0,
CV_OUT Point* minLoc=0,
CV_OUT Point* maxLoc=0,
InputArray mask=noArray()
);
参数1:InputArray类型的src,输入单通道数组(图像)。
参数2:double*类型的minVal,返回最小值的指针。若无须返回,此值置为NULL。
参数3:double*类型的maxVal,返回最大值的指针。若无须返回,此值置为NULL。
参数4:Point*类型的minLoc,返回最小位置的指针(二维情况下)。若无须返回,此值置为NULL。
参数5:Point*类型的maxLoc,返回最大位置的指针(二维情况下)。若无须返回,此值置为NULL。
参数6:InputArray类型的mask,用于选择子阵列的可选掩膜。
5.演示代码:
void Match_Demo(int,void*){
Mat img_display;
src.copyTo(img_display);
int result_rows = src.rows - temp.rows + 1;
int result_cols = src.cols - temp.cols + 1;
dst.creat(Size(result_rows),Size(result_cols ),CV_32FC1);
matchTemplate(src,temp,dst,match_method);
normalize(dst,dst,0,1,NORM_MINMAX,-1,MAT());
double minValue,maxCalue;
Point minLoc;//最小值的位置
Point maxLoc;//最大值的位置
Point matchLoc;
minMaxLoc(dst,&minValue,&maxValue,&minLoc,&maxLoc,MAt());
//此处要区分方法
if(match_method==TM_SQDIFF||match_method==TM_SQDIFF_NORMED){
matchLoc=minLoc;
}
else{
matchLoc=maxLoc;
}
rectangle(img_display,matchloc,Point(matchLoc.x+temp.cols,
matchLoc.y+termp.rows),Scalar::all(0),2,LINE_AA);
rectangle(dst,matchloc,Point(matchLoc.x+temp.cols,
matchLoc.y+termp.rows),Scalar::all(0),2,LINE_AA);
imshow(OUTPUT_T,dst);
imshow(match_t,img_display);
return ;
}
6.课外扩展
Point类
matchTemplate函数
各类模板匹配算法的了解
7.出现问题
TM_CCORR匹配出现问题
(原因:这个算法有时候会失真)

















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









