







 本文详细指导了在Ubuntu 20.04系统上安装ROS Noetic版本的步骤,包括配置软件源、添加ROS源、安装密钥、环境变量设置、解决rosdep初始化问题,并测试了小海龟、RVIZ和Gazebo。还提供了虚拟机Gazebo问题的修复建议。
本文详细指导了在Ubuntu 20.04系统上安装ROS Noetic版本的步骤,包括配置软件源、添加ROS源、安装密钥、环境变量设置、解决rosdep初始化问题,并测试了小海龟、RVIZ和Gazebo。还提供了虚拟机Gazebo问题的修复建议。
Ubuntu20.04下ROS-Noetic安装及问题解决与测试
0.主要参考:
官方安装
官方中文安装
在Ubuntu20.04中安装ROS Noetic版本
在Ubuntu20.04上安装ROS机器人操作系统-Noetic
虚拟机运行Gazebo问题修复
1.配置系统软件源
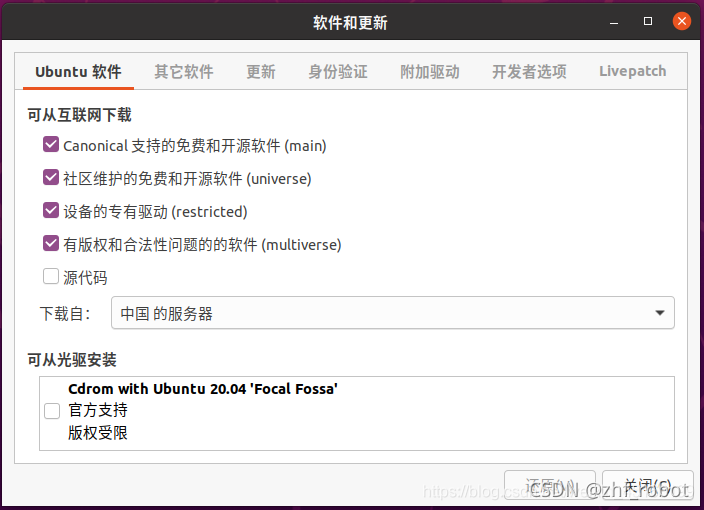
打开“软件和更新”,进入到“Ubuntu软件“页面,允许universe、restricted、multiverse三项,即勾选这三项,如下图所示。安装完ubuntu系统后这三项是默认允许的,但还是检查一下比较好。
2.添加ROS软件源
打开终端,输入以下指令,添加ROS官方的软件源镜像:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
3.添加密钥
使用如下命令添加密钥:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
4.安装ROS
1.使用如下命令确保软件索引是最新的:
sudo apt update
使用如下命令安装桌面完整版:
sudo apt install ros-noetic-desktop-full
5.设置环境变量
在使用之前还要对环境变量进行配置,在终端输入如下指令:
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
6.构建包的依赖关系
到目前为止,您已经安装了运行核心ROS包所需的软件。为了创建和管理您自己的ROS工作区,有各种工具和需求分别分发。例如,rosinstall是一个常用的命令行工具,它使您能够使用一个命令轻松下载ROS包的多个源代码树。
要安装此工具和构建ROS包的其他依赖项,请运行:
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
6.1. 初始化rosdep
在使用许多ROS工具之前,需要初始化rosdep。rosdep使您能够轻松地为要编译的源代码安装系统依赖项,并且是在ROS中运行某些核心组件所必需的。如果您尚未安装rosdep,请按以下步骤进行安装。
sudo apt install python3-rosdep
6.2.初始化rosdep及问题解决
通过以下命令,可以初始rosdep
sudo rosdep init
rosdep update
6.2.1 初始化问题解决(参考原B站up:叶念西风)
在运行sudo rosdep init时会出现ERROR:
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
可以通过下述链接下载rosdep.zip文件:
链接: https://pan.baidu.com/s/1RUtnTTYTvbMfmMAQPjsZYg 提取码: edn1
在下载目录中:解压rosdep.zip文件至/opt/rosdep目录
sudo unzip rosdep.zip -d /opt/rosdep
6.2.1.1修改__init__.py文件内容:
sudo gedit /usr/lib/python3/dist-packages/rosdistro/__init__.py
将第68行左右的:
DEFAULT_INDEX_URL = 'https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml'
修改为:
DEFAULT_INDEX_URL = 'file:///opt/rosdep/rosdistro/master/index-v4.yaml'
6.2.1.2 修改rep3.py文件内容
sudo gedit /usr/lib/python3/dist-packages/rosdep2/rep3.py
将第39行左右:
REP3_TARGETS_URL = 'https://raw.githubusercontent.com/ros/rosdistro/master/releases/targets.yaml'
修改为:
REP3_TARGETS_URL = 'file:///opt/rosdep/rosdistro/master/releases/targets.yaml'
6.2.1.3修改source_list.py文件内容
sudo gedit /usr/lib/python3/dist-packages/rosdep2/sources_list.py
将第72行左右:
DEFAULT_SOURCES_LIST_URL = 'https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list'
修改为
DEFAULT_SOURCES_LIST_URL = 'file:///opt/rosdep/rosdistro/master/rosdep/sources.list.d/20-default.list'
至此,修改完成,可继续安装
运行:
sudo rosdep init
出现:
Wrote /etc/ros/rosdep/sources.list.d/20-default.list
Recommended: please run
rosdep update
继续运行:
rosdep update
出现:
reading in sources list data from /etc/ros/rosdep/sources.list.d
Hit file:///opt/rosdep/rosdistro/master/rosdep/osx-homebrew.yaml
Hit file:///opt/rosdep/rosdistro/master/rosdep/base.yaml
Hit file:///opt/rosdep/rosdistro/master/rosdep/python.yaml
Hit file:///opt/rosdep/rosdistro/master/rosdep/ruby.yaml
Hit file:///opt/rosdep/rosdistro/master/releases/fuerte.yaml
Query rosdistro index file:///opt/rosdep/rosdistro/master/index-v4.yaml
Skip end-of-life distro "ardent"
Skip end-of-life distro "bouncy"
Skip end-of-life distro "crystal"
Skip end-of-life distro "dashing"
Skip end-of-life distro "eloquent"
Add distro "foxy"
Add distro "galactic"
Skip end-of-life distro "groovy"
Skip end-of-life distro "hydro"
Skip end-of-life distro "indigo"
Skip end-of-life distro "jade"
Skip end-of-life distro "kinetic"
Skip end-of-life distro "lunar"
Add distro "melodic"
Add distro "noetic"
Add distro "rolling"
updated cache in /home/zobot/.ros/rosdep/sources.cache
至此,ROS安装完成
7.ros测试
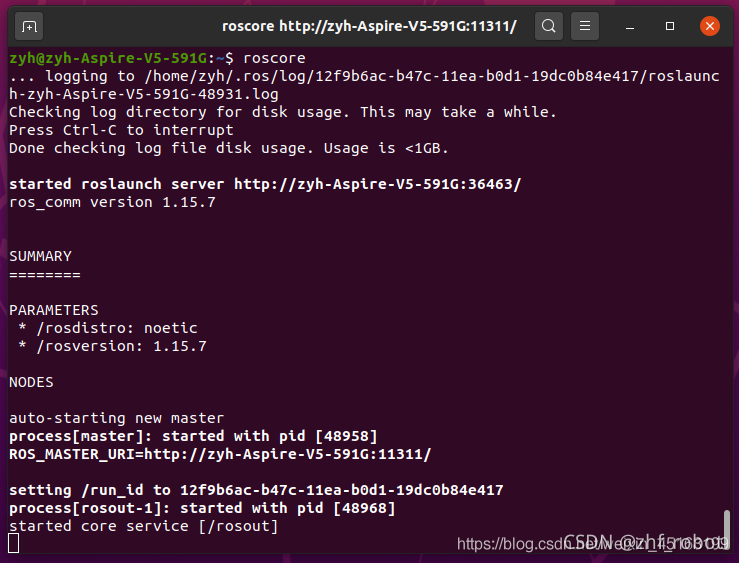
可以在终端输入roscore命令查看安装好的ros的发行版名称为noetic和版本号1.15.7,如下图所示
7.1 小海龟测试
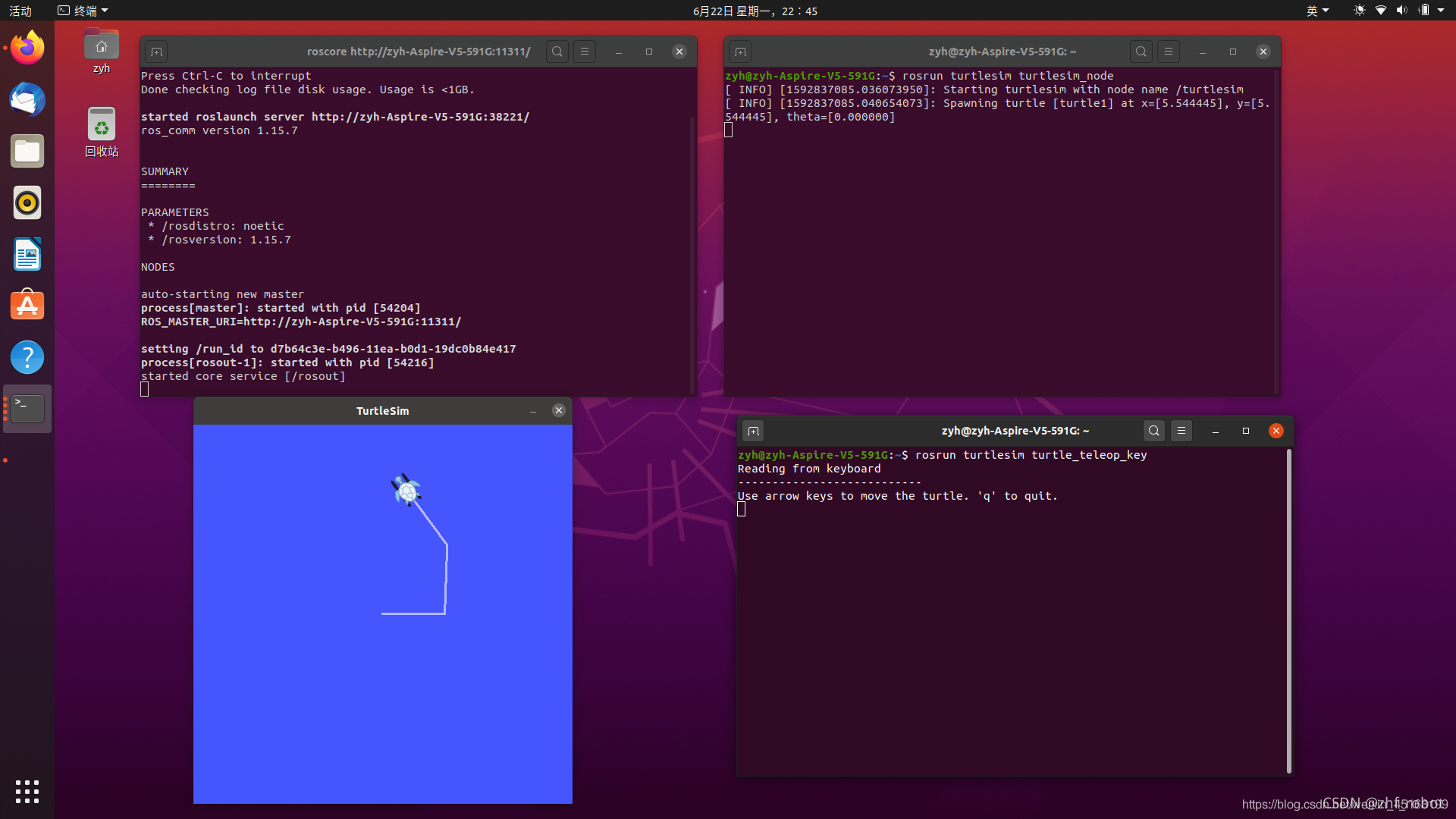
打开一个终端,输入命令:rosrun turtlesim turtlesim_node,可以看到小乌龟的仿真界面已经打开了。再打开一个新终端输入指令:rosrun turtlesim turtle_teleop_key,可以通过键盘的方向键控制小乌龟在界面中移动,如下图所示:
7.2 RVIZ测试
打开新的终端,启动RVIZ,启动前确认打开的roscore没有关闭
rviz
能打开图形化,没报错即正常
7.2 Gazebo测试
打开新的终端,启动Gazebo,启动前确认打开的roscore没有关闭
gazebo
能打开图形化,没报错即正常
使用虚拟机可能闪退,需要关闭硬件加速功能
虚拟机运行Gazebo问题修复
关闭硬件加速功能,可参考:
echo "export SVGA_VGPU10=0" >> ~/.bashrc
source ~/.bashrc


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









