






 本文探讨了 Directed Graphical Models 中的DAG概念,介绍了Markov条件、d-separation规则,包括非条件分离和条件阻塞的实例。重点讲解了如何利用d-separation判断变量间的独立性及其在有向图中的应用。
本文探讨了 Directed Graphical Models 中的DAG概念,介绍了Markov条件、d-separation规则,包括非条件分离和条件阻塞的实例。重点讲解了如何利用d-separation判断变量间的独立性及其在有向图中的应用。
关于DAG的一些零散记录
Directed Graphical Models
Let G be a DAG with vertices V = (X1,…,Xd). For notational simplicity, we sometimes represent V = {1,…,d}. If P is a distribution for V with probability function p(x), we say that P is Markov to G, or that G represents P, if
p
(
x
)
=
∏
j
=
1
d
p
(
x
j
∣
π
x
j
)
p(x)=\prod\limits_{j=1}^dp(x_j|\pi_{xj})
p(x)=j=1∏dp(xj∣πxj)
where
π
x
j
\pi_{xj}
πxj is the set of parent nodes of
X
j
X_j
Xj . The set of distributions represented by
G
G
G is denoted by
M
(
G
)
\mathcal{M}(G)
M(G).
Par(X), the set of “parents” of a node X, consists of the nodes Z such that Z → X. Childr(X), the set of X’s “children”, includes exactly the nodes Z such that X → Z. The sets Anc(X) (“ancestors”) and Desc(X) (“descendants”) are defined by substituting “ ⇝ \leadsto ⇝ ” for “ → \to →” in the last two sentences—but with the addition that a node always is its own ancestor and descendant, but never its child or parent (see Spirtes et al. (2000), p. 10).
Markov Condition
W ⊥ ⊥ V \ ( D e s c ( W ) ∪ P a r ( W ) ) ∣ P a r ( W ) W\perp \!\!\! \perp V\backslash(Desc(W)\cup Par(W))|Par(W) W⊥⊥V\(Desc(W)∪Par(W))∣Par(W)
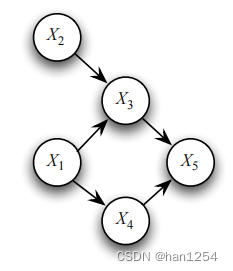
如图, X 1 ⊥ ⊥ X 2 , X 2 ⊥ ⊥ { X 1 , X 4 } , X 3 ⊥ ⊥ X 4 ∣ { X 2 , X 1 } , { X 4 , X 5 } ⊥ ⊥ X 2 ∣ { X 1 , X 3 } X_1\perp\!\!\!\perp X_2,X_2\perp\!\!\!\perp\{X_1,X_4\},X_3\perp\!\!\!\perp X_4|\{X_2,X_1\},\{X_4,X_5\}\perp\!\!\!\perp X_2|\{X_1,X_3\} X1⊥⊥X2,X2⊥⊥{X1,X4},X3⊥⊥X4∣{X2,X1},{X4,X5}⊥⊥X2∣{X1,X3}
d-separation
d-SEPARATION WITHOUT TEARS(At the request of many readers)
d,即directional
d-separation是一个判定标准,来判断给定的因果图中集合
X
X
X的变量在给定
Z
Z
Z的情况下是否与
Y
Y
Y无关。主要思想是将“相关”和“可连接性”以及“无关”和“不可连接性”联系起来。假设我们正在面对着一个有向箭头系统,这个系统中一些节点是测量变量,即已经精确地知道了它们的值。
-
非条件分离
规则1:如果两个节点 x x x和 y y y之间有非阻塞路径,则说明它们是d-connected。这里的路径是不考虑方向的。“无阻塞路径”意味着我们可以找到一条路径,不经过一对正面撞击的箭头。换句话说,正面撞击的箭头无法构成能够传递信息的连接。撞击被称为“collider”。
例1:
x → r → s → t ← u ← v → y x\rightarrow r\rightarrow s \rightarrow t \leftarrow u\leftarrow v \rightarrow y x→r→s→t←u←v→y
路径 x − r − s − t x-r-s-t x−r−s−t是非阻塞的,因此 x x x和 t t t是d-connected。同样地,路径 t − u − v − y t-u-v-y t−u−v−y也是非阻塞的,所以 t t t和 y y y也是d-connected。然而, x x x和 y y y不是d-connected,它们之间没有不包含撞击的路径。都必须经过 t t t这个撞击位置。因此我们称 x x x和 y y y是d-separated,同样 x x x和 v v v、 s s s和 u u u、 r r r和 u u u等等都是如此。 -
条件阻塞
当一组变量 Z Z Z的值给定时,剩余节点的条件分布可能发生改变。一些独立的变量可能变得不独立,一些非独立的变量可能变得独立。为了表示图中的动态改变,我们需要定义“条件有向连接性(conditional d-connectedness)”或者精确一点,“在Z集合条件下的有向连接性”
规则2:如果 x x x和 y y y之间有不经过Z中节点的无冲撞路径,则称 x x x和 y y y在集合Z的节点条件下是有向连接的。如果没有这样的路径,则说 x x x和 y y y在条件Z下是有向分离的
我们也可以说, x x x和 y y y之间的每一条路径都是被Z堵塞的。
例2:
x → r ◯ → s → t ← u ← v ◯ → y x\rightarrow \textcircled{r}\rightarrow s \rightarrow t \leftarrow u\leftarrow \textcircled{v} \rightarrow y x→r◯→s→t←u←v◯→y
让Z作为集合 { r , v } \{r,v\} {r,v},很明显, x x x和 y y y在Z条件下是有向分离的,同样也有 s s s和 u u u、 y y y和 s s s等。只有 s − t s-t s−t以及 u − t u-t u−t是在Z条件下有向连接的。而 s − t − u s-t-u s−t−u由于规则1而被阻塞。 -
条件定义在了在冲撞点上
规则3:如果冲撞点是条件集合Z的一个节点,或者是Z的派生节点,那么这个冲撞点则不会造成阻塞。
让Z表示集合 { r , p } \{r,p\} {r,p},规则3告诉我们现在 s s s和 y y y在Z条件下是有向连接的,然而由于 r r r为条件集合的一员, x x x和 u u u在Z下仍然是有向分离的。

















 1841
1841

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









