









 LaPred是一种车道感知预测网络,旨在解决动态智能体的未来轨迹预测问题。它通过从未来轨迹分布中生成车道相关的轨迹样本,并使用自我监督学习来确定最可信的未来路径。在nuScenes和Argoverse数据集上的实验显示,LaPred在横向预测精度和可解释性方面优于现有技术。
LaPred是一种车道感知预测网络,旨在解决动态智能体的未来轨迹预测问题。它通过从未来轨迹分布中生成车道相关的轨迹样本,并使用自我监督学习来确定最可信的未来路径。在nuScenes和Argoverse数据集上的实验显示,LaPred在横向预测精度和可解释性方面优于现有技术。
LaPred:动态代理多模态未来轨迹的车道感知预测
原文链接:
LaPred: Lane-Aware Prediction of Multi-Modal Future Trajectories of Dynamic Agents (thecvf.com)
研究背景
DNN模型中间逻辑可解释性差;
交互感知预测:需要人为设计坐标系统和张量分辨率;
场景上下文感知预测:通过轨迹数据推断二维图像上绘制的车道关系难度高;
研究问题
预测问题:在给定动态智能体当前和过去位置以及所处环境信息如何预测未来运动?
解决方案: 车道感知预测网络(LaPred)
per-lane joint feature从未来轨迹分布模式中生成不同的轨迹样本,解释对车道选择形象最大的信息;
辅助模型通过施加自我监督学习损失来决定关注那条候选车道以预测最可信的未来轨迹;
效果
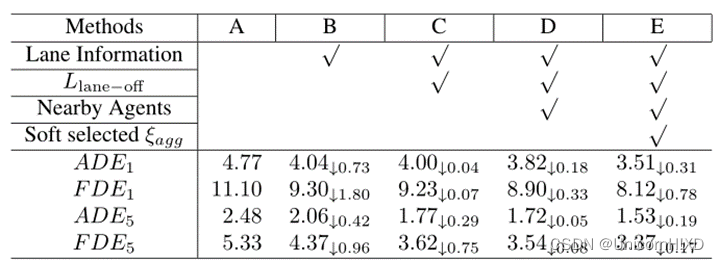
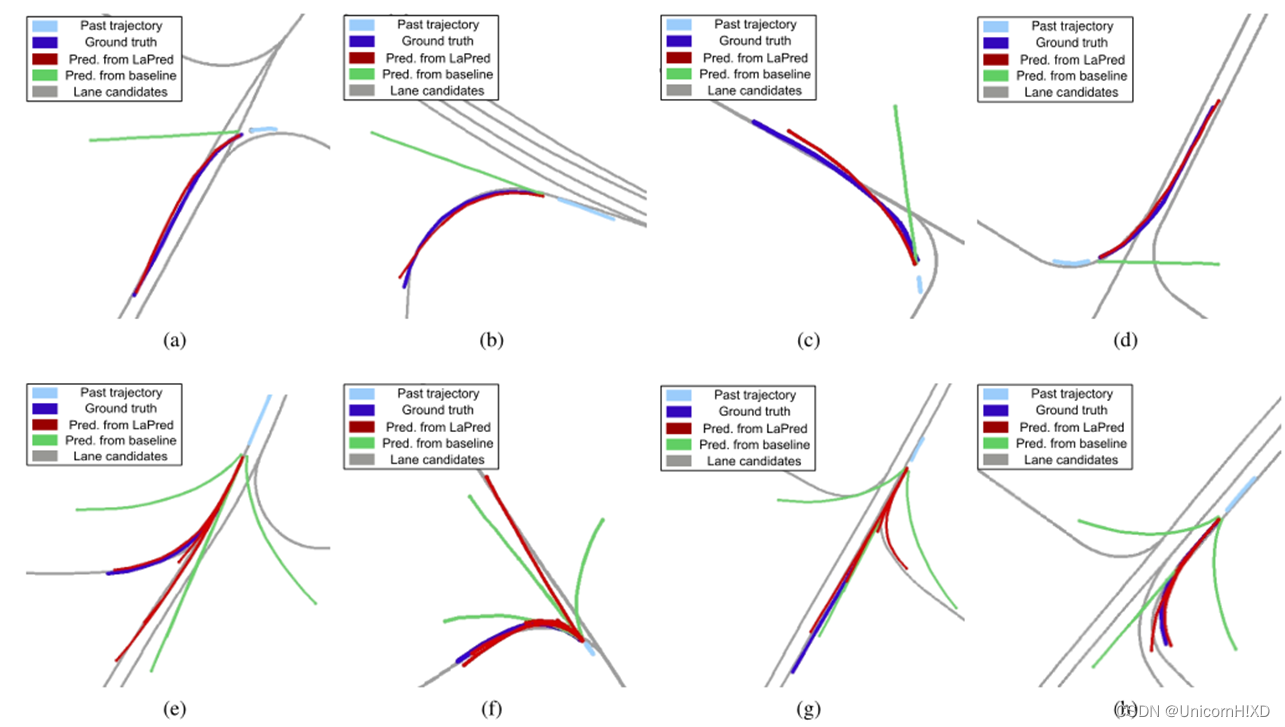
在nuScenes(1000个场景,245414个轨迹实例(2HZ采样8秒的2D坐标序列))和Argoverse数据集(324557个场景,5秒,10HZ采样)实验ADE,PDE高于SOTA,成功提取了周围环境的表示,提高了横向方向的预测精度,且可解释性强;
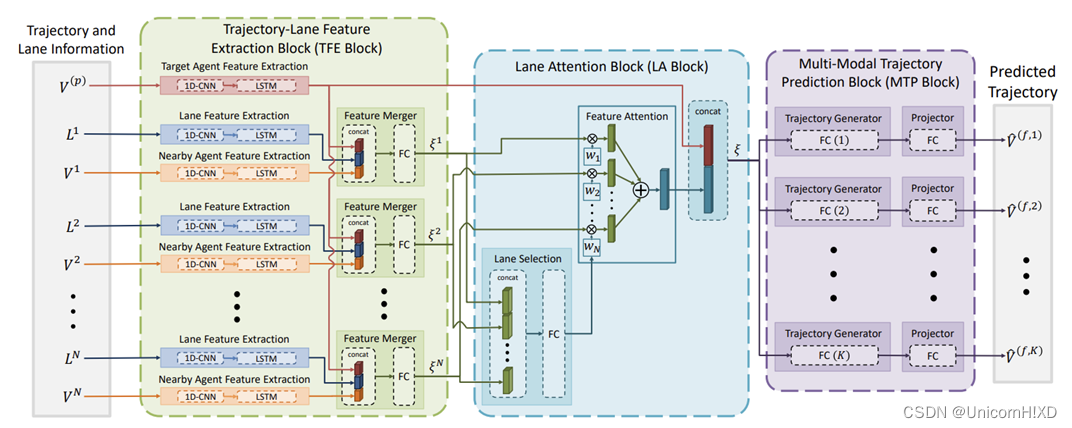
LaPred框架:TFE块生成每个候选车道的轨迹-车道特征。LA块通过轨迹-车道特征的加权聚合产生观测数据的联合表示。最后在MTP块中生成K个多轨迹样本。
数据集:nuScenes(提供自我车辆状态日志,附近agent位置的注释和HD地图数据,1000个场景,245414个轨迹实例(2HZ采样8秒的2D坐标序列))和Argoverse数据集(用于轨迹预测数据集,包含agent轨迹,附近agent轨迹,HD地图数据,324557个场景,5秒,10HZ采样)实验
该lane-aware prediction (LaPred) network 采用语义地图提取的实例级车道,预测多模态轨迹。每个车道候选,LaPred 提取车道-轨迹的联合特征,通过确认目标可能车道候选的自监督学习过程,将所有候选的特征以attention加权的方式融合


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









