







PID简介
在介绍什么是PID之前先讲述我们需要先明白两个该概念:闭环和开环
开环(Open Loop):控制器单向输出值给被控对象,不获取被控对象的反馈,控制器对被控对象的执行状态不清楚

闭环(Closed Loop):控制器输出值给被控对象,同时获取被控对象的反馈,控制器知道被控对象的执行状态,可以根据反馈修改输出值以优化控制
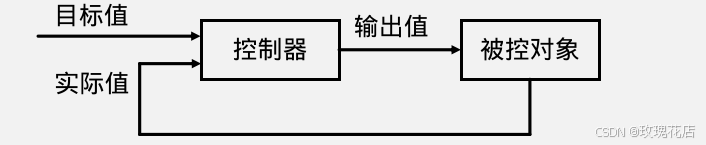
总结:简单来说,开环不需要关注被控对象的状态,闭环需要获取被控对象的状态,根据被控状态的反馈值来修正实际输出值。也就是说开环不具有误差修正功能,闭环具有误差修正功能。
什么是PID
(一)、PID是比例(Proportional)、积分(Integral)、微分(Differential)的缩写
(二)、PID是一种闭环控制算法,它动态改变施加到被控对象的输出值(Out),使得被控对象某一物理量的实际值(Actual),能够快速、准确、稳定地跟踪到指定的目标值(Target)
(三)、PID是一种基于误差(Error)调控的算法,其中规定:误差=目标值-实际值,PID的任务是使误差始终为0。PID对被控对象模型要求低,无需建模,即使被控对象内部运作规律不明确,PID也能进行调控。
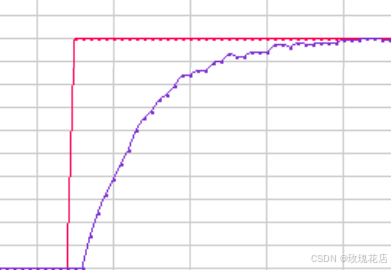
注意:(三)中的画线部分可以这么理解
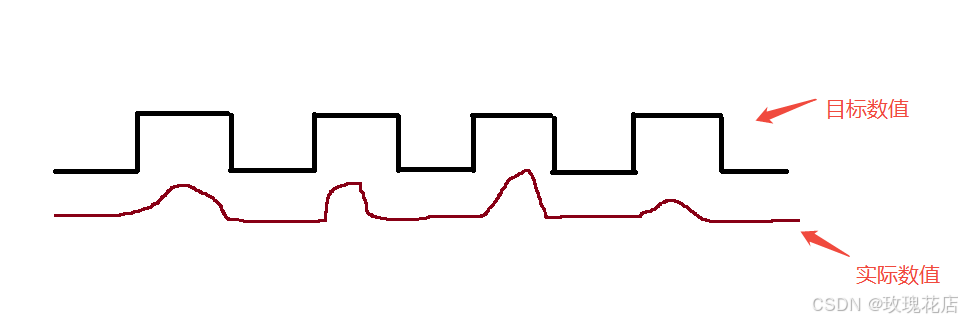
如上图可以看到每个波峰的实际数值和目标数值的误差都不一样,即误差量是不规律的。这种情况PID依然可以进行调控,使得实际曲线尽量体合目标曲线,这就是上面所说的。即使被控对象内部运作规律不明确,PID也能进行调控。
PID公式
①定义误差: e r r o r ( t ) = t a r g e t ( t ) − a c t u a l ( t ) ② P I D 输出值: o u t ( t ) = K p ( e r r o r ( t ) + 1 T i ∫ 0 t e r r o r ( t ) d t + T d d e r r o r ( t ) d t ) ③ P I D 输出值: o u t ( t ) = K p ∗ e r r o r ( t ) + K i ∗ ∫ 0 t e r r o r ( t ) d t + K d ∗ d e r r o r ( t ) d t \begin{split} ① 定义误差: error(t) &= target(t)−actual(t) \\ ②PID输出值:out(t) &=K_p(error(t)+\frac{1}{T_i}∫_0^terror(t)dt+\frac{T_dderror(t)}{dt}) \\ ③PID输出值:out(t) &= K_p∗error(t)+K_i∗∫_0^terror(t)dt+K_d∗\frac{derror(t)}{dt} \end{split} ①定义误差:error(t)②PID输出值:out(t)③PID输出值:out(t)=target(t)−actual(t)=Kp(error(t)+Ti1∫0terror(t)dt+dtTdderror(t))=Kp∗error(t)+Ki∗∫0terror(t)dt+Kd∗dtderror(t)
上诉公式中可以看出,公式②和③是一样的,公式③中用 K i K_i Ki代替 1 T i \frac{1}{T_i} Ti1, K d K_d Kd代替了 T d T_d Td。(后续就用公式③来讲述)
注意:PID并不是类似一个由客观事实来推理得到的,而是由经验来构成的。
PID分析
根据上面公式③,我们可以将PID拆成三部分为:
P部分 : 比例增益,其中 K p K_p Kp为比例系数 K p ∗ e r r o r ( t ) K_p*error(t) Kp∗error(t)
I部分 : 积分增益,其中 K i K_i Ki为积分系数 K i ∗ ∫ 0 t e r r o r ( t ) d t K_i∗∫_0^terror(t)dt Ki∗∫0terror(t)dt。
D部分 : 微分增益,其中 K d K_d Kd为微分系数 K d ∗ d e r r o r ( t ) d t K_d∗\frac{derror(t)}{dt} Kd∗dtderror(t)。
下面我们将对PID三个部分拆解分析,将以PWM驱动电机为实验例子,电机的实际速度和期望速度变化来讲解。下文所表述的 o u t ( t ) out(t) out(t)可理解为向电机输出的力(实际是改变PWM占空比例影响电机输出的力从而改变电机的转速)。
P部分
只含有比例项的PID输出值: o u t ( t ) = K p ∗ e r r o r ( t ) out(t) = K_p∗error(t) out(t)=Kp∗error(t)
p1、比例项的输出值仅取决于当前时刻的误差,与历史时刻无关。当前存在误差时,比例项输出一个与误差呈正比的值,当前不存在误差时,比例项输出0
p2、 K p K_p Kp越大,比例项权重越大,系统响应越快,但超调也会随之增加
p3、纯比例项控制时,系统一般会存在稳态误差, K p K_p Kp越大,稳态误差越小
为了防止陷入误区,这里先讲解一下牛顿三定律
牛顿第一定律:任何一个物体在不受外力或受平衡力的作用(合外力为零)时,总是保持静止状态或匀速直线运动状态,直到有作用在它上面的外力迫使它改变这种状态为止。
牛顿第二定律:物体的加速度跟物体所受的合外力成正比,跟物体的质量成反比,加速度的方向跟合外力的方向相同。即F = ma
牛顿第三定律:两个物体之间的作用力和反作用力,总是同时在同一条直线上,大小相等,方向相反。
那么功率恒定的电机(直流电机)为什么不是一直加速,而是达到最大速度后匀速呢?(不考虑摩擦和电机负载)
1、电机在启动时,由于电流较大,产生的电磁力也很大,导致转子加速。
2、随着转速增加,反电动势逐渐增大,限制了电流的大小。反电动势的增大使得电流逐渐减少,从而减少了电磁力。
3、当反电动势和供电电压达到一定平衡时,电流会趋于稳定,电机的转速也就会稳定下来,进入匀速运行状态。
电机的匀速状态是在电磁力与负载、反电动势之间的平衡下产生的。
下面我们看个公式$P(功率) = U* I $
假设一个电机为的功率为Pw,当启动电机后,电机里面的磁场发生改变,转子切割磁场(磁场方向发生改变导致的切割)产生洛伦磁力
F
L
=
I
∗
L
∗
B
F_L = I*L*B \\
FL=I∗L∗B
其中 I 是通过电枢导线的电流,L 是导线的有效长度,B 是磁场强度。
因是直流电机所以B是不变化的,L肯定也不变嘛。
U是外部电源电压是不变的,在启动瞬间,I = U/R。 F s = I s ∗ L ∗ B F_s = I_s*L*B Fs=Is∗L∗B
由牛二定律可的
a
s
=
F
s
/
m
a_s = F_s/m
as=Fs/m,有了加速度就有了速度,当有了速度以后,此时不单单是磁场方向发生改变导致的切割,由于转子的转动也会主动切割磁感线,则会产生一个反向的电压即反电动势。
E
b
=
k
⋅
ω
E_b=k⋅ω
Eb=k⋅ω
k是与电机设计和物理特性有关的常数,w是角速度。
则实际电压就为
U
l
=
U
−
E
b
U_l = U - E_b
Ul=U−Eb,带入上式可得
a
=
(
(
U
−
E
b
)
/
R
∗
L
∗
B
)
/
m
a = ((U - E_b)/R*L*B)/m
a=((U−Eb)/R∗L∗B)/m
则容知,是随着转速的增加,加速度w也会增大,反动电势增大。则加速度a会减小( V = V 0 + a i ∗ t V = V_0 + a_i * t V=V0+ai∗t)注意加速度虽然在减小,速度还是在增加的哈,当反动电势和电源电压相互抵消后,加速度为0,此时速度达到最大值。也可知在启动瞬间实际功率是远大于额定功率Pw的,当速度稳定后功率稳定为Pw,此时的功率也叫额定功率。
了解上诉部分再来看p1、p2、p3。
p1项很容易理解
o
u
t
(
t
)
=
K
p
∗
e
r
r
o
r
(
t
)
out(t) = K_p*error(t)
out(t)=Kp∗error(t),
e
r
r
o
r
(
t
)
error(t)
error(t)为0,out肯定为0麻。
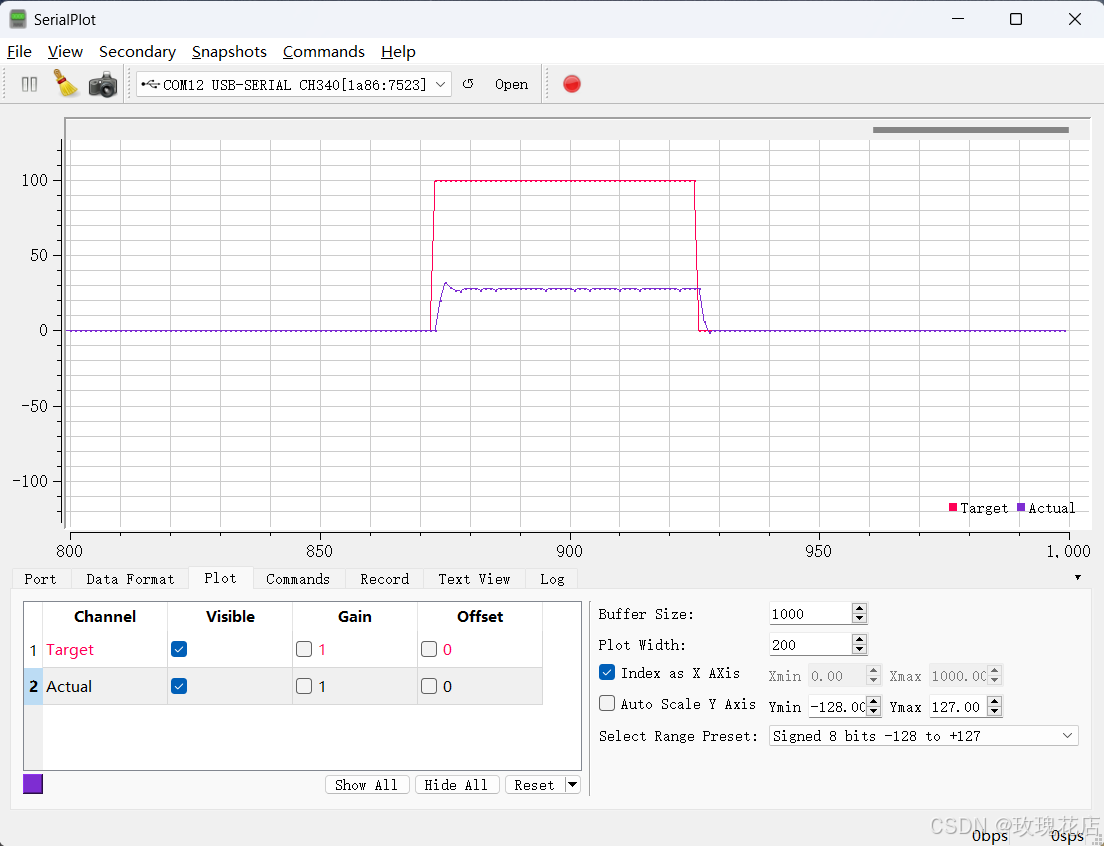
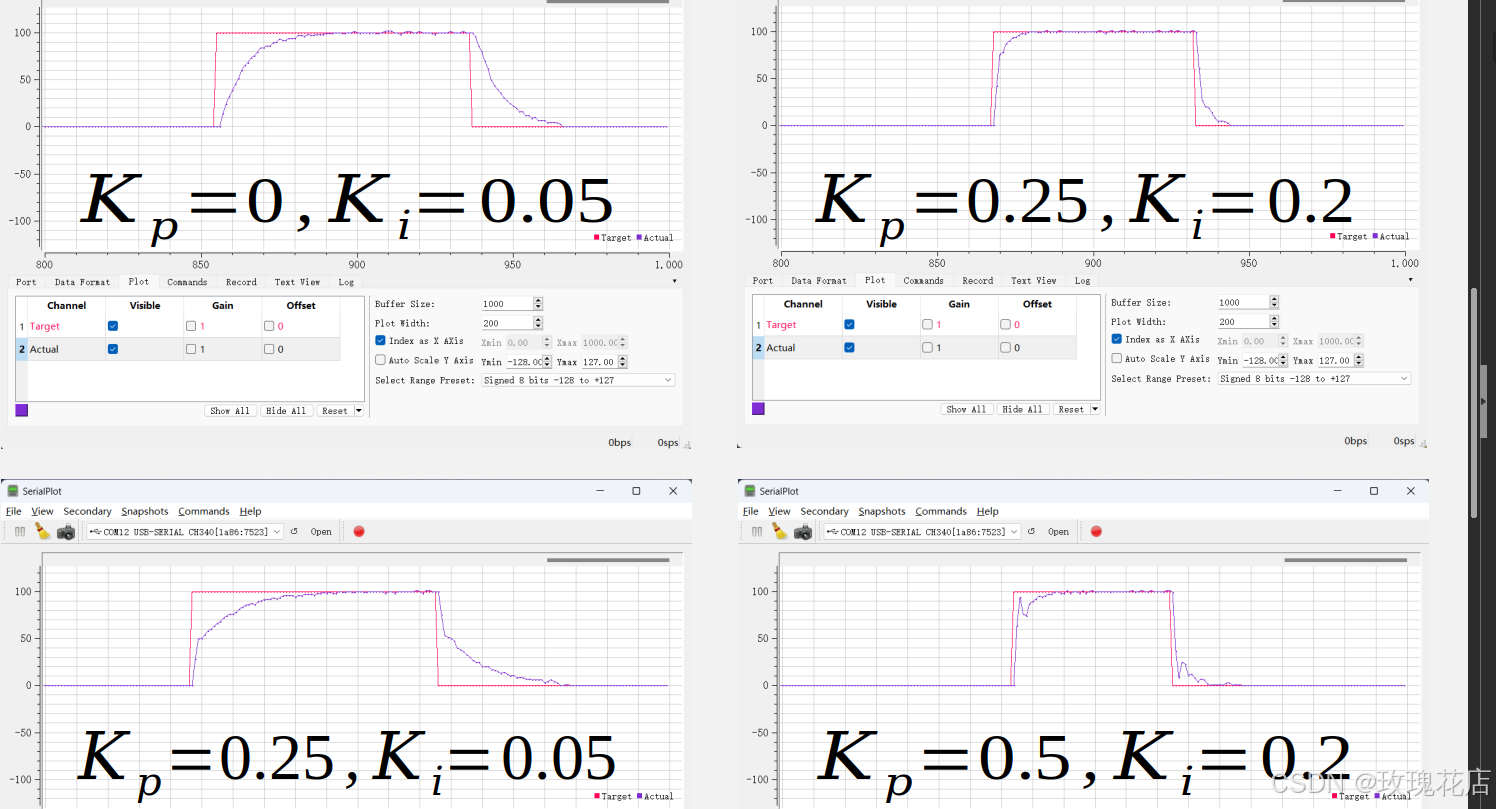
p2项目,在电机启动瞬间,目标数值和实际数值差值肯定是最大的嘛,输出的力也是最大的,所以转速变化是最快的,系统响应是最快的。如下图启动时刻那个尖尖(启动瞬间过后,有了速度error(t)减小,所以out(t)也减小,所以会下降)。当速度n满足out(t) = 反电动势 + 摩擦力,此时系统稳定。超调可以看0-100,和100-0的瞬间,此时error(t)变化最大,因此变化最激烈,所以Kp越大,超调越严重。如果我们的期望目标不变,Kp越大则稳定后的曲线越靠近目标曲线,因此Kp越大稳态误差越小。
K
p
=
0.25
K_p = 0.25
Kp=0.25
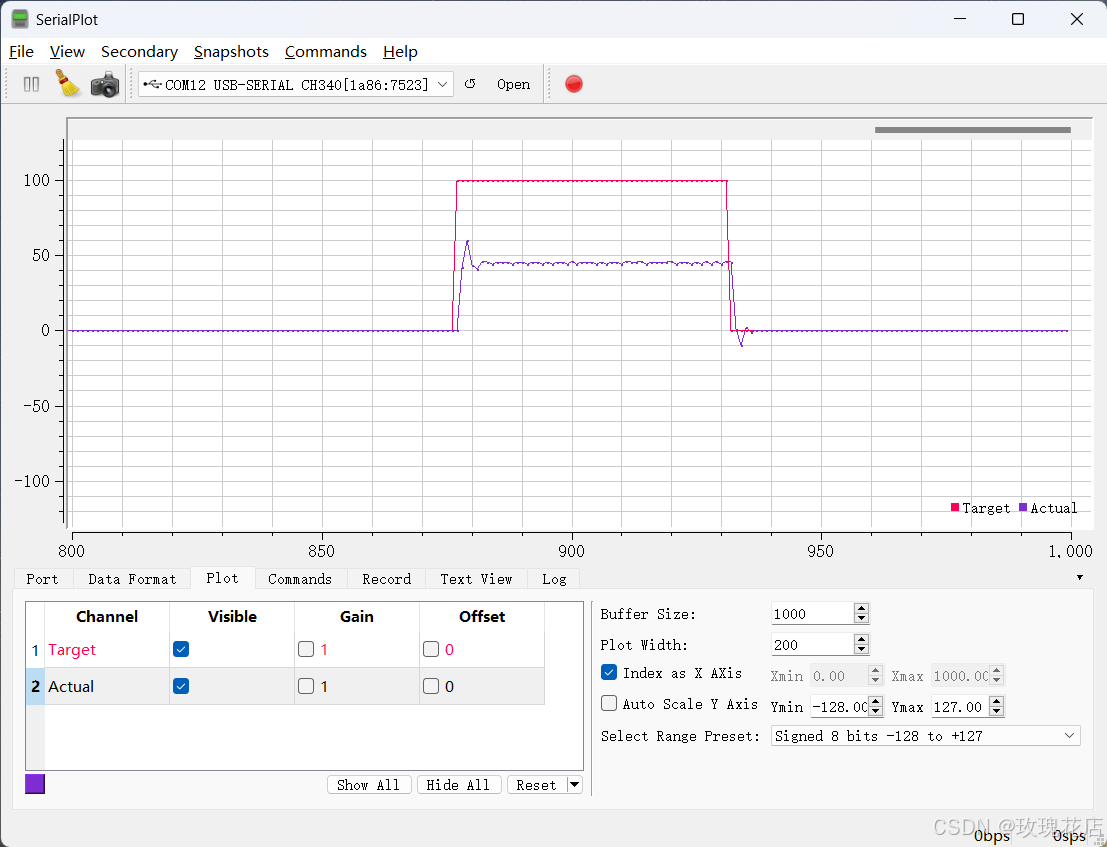
K p = 0.5 K_p = 0.5 Kp=0.5
P+I部分
你可能会说,我当前的误差量+ 上次次输出的值,不应该是这样做吗?是的没错,这个做法正是P+I项。
我们先看一下I项的特点
I1、积分项的输出值取决于所有时刻误差的积分,与历史时刻有关。积分项将历史所有时刻的误差累积,乘上积分项系数后作为积分项输出值。
I2、积分项用于弥补纯比例项产生的稳态误差,若系统持续产生误差,则积分项会不断累积误差,直到控制器产生动作,让稳态误差消失
I3、积分项权重越大,稳态误差消失越快,但系统滞后性也会随之增加
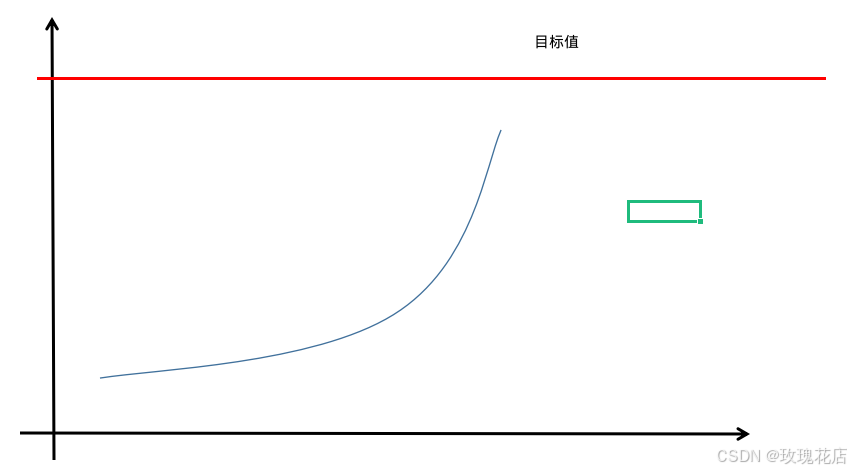
直白点解释,I项目就是对历史误差的积分,举个例子, K i ∗ ∫ 0 t e r r o r ( t ) d t K_i∗∫_0^terror(t)dt Ki∗∫0terror(t)dt,假设Ki = 0.2;目标值是100,第一时刻误差是100 -0 = 100,则第二时刻的数值是20,第二时刻的误差是80,则第三时刻为20+80*0.2 = 36…以此类推直到没有误差。其曲线入下图:
误差越来越小,因此积分数值的变化率越来越小。
即分享I1、I2、I3都很好理解,但是注意这一句但系统滞后性也会随之增加,Ki越大,应该响应越快,为什么反而会滞后呢?
假设我们的Ki = 10;需要把转速由0变化到100,第一时刻历史误差为0,因此不变,第二时刻历史误差为100,100*10=1000,严重超调,是不是需要反过来调节,这不是也花费时间吗,越大花费的时间越久麻,过大严重过大甚至无法调节到稳态,形成严重的系统振荡。
结合下图PI的调控来看就比较好理解了
P+I+D部分
在上述讲述中易知,当Kp过大容易造成瞬间急剧变化,如果在加上Ki项的助力,这种变化更加剧烈。为避免这种情况因此我们引入了D项,即微分项。
K d ∗ d e r r o r ( t ) d t K_d∗\frac{derror(t)}{dt} Kd∗dtderror(t)
D1、微分项的输出值取决于当前时刻误差变化的斜率,与当前时刻附近误差变化的趋势有关。当误差急剧变化时,微分项会负反馈输出相反的作用力,阻碍误差急剧变化
D2、斜率一定程度上反映了误差未来的变化趋势,这使得微分项具有 “预测未来,提前调控”的特性
D3、微分项给系统增加阻尼,可以有效防止系统超调,尤其是惯性比较大的系统
K_d越大,微分项权重越大,系统阻尼越大,但系统卡顿现象也会随之增加
对于这个公式简单点理解,就是当前时刻的斜率。
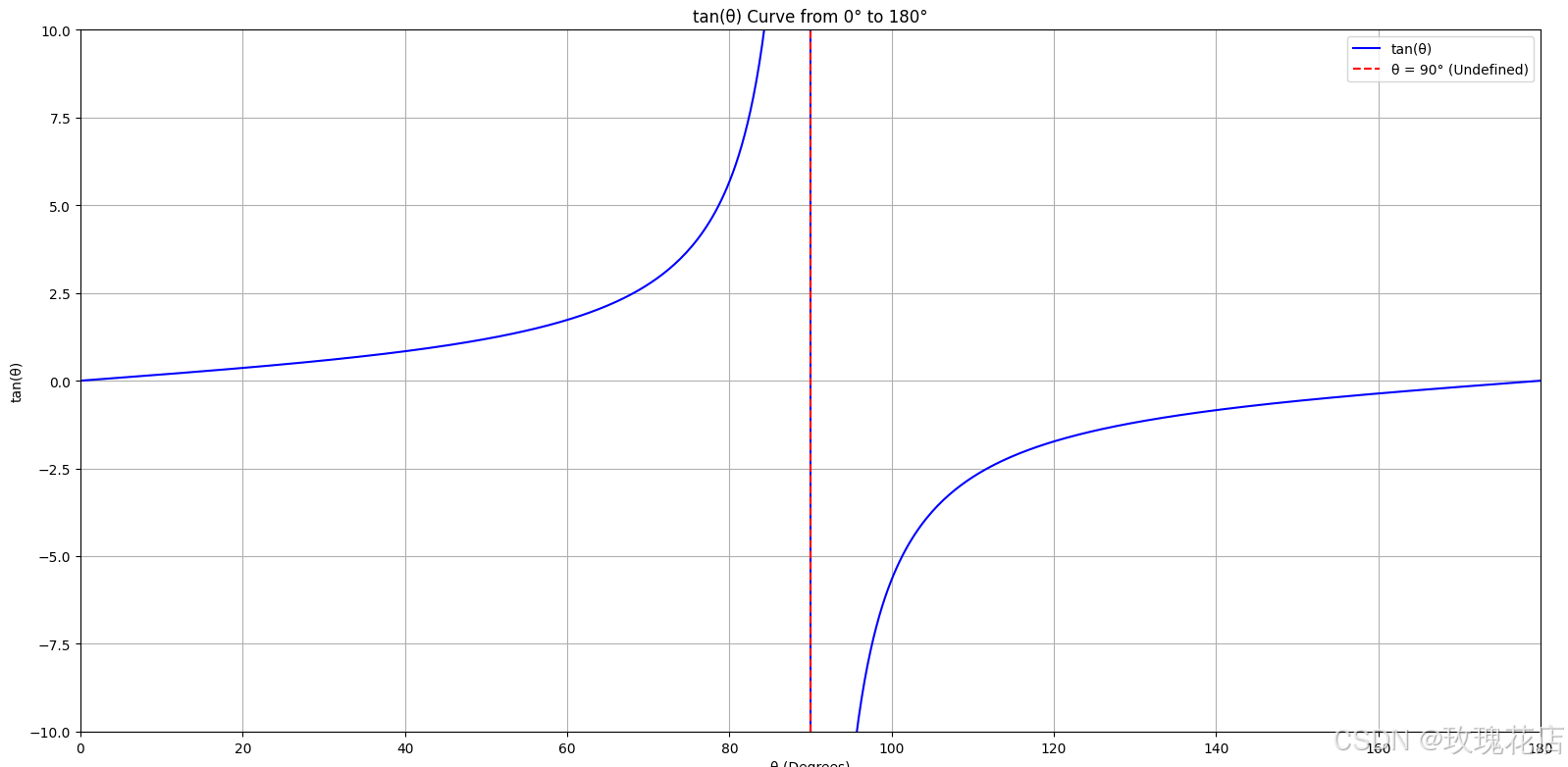
我们看一组示意图
可以看到越来越接近目标值,且变化的增量越来越快(斜率越来越大)。
再看看误差和时间的变化
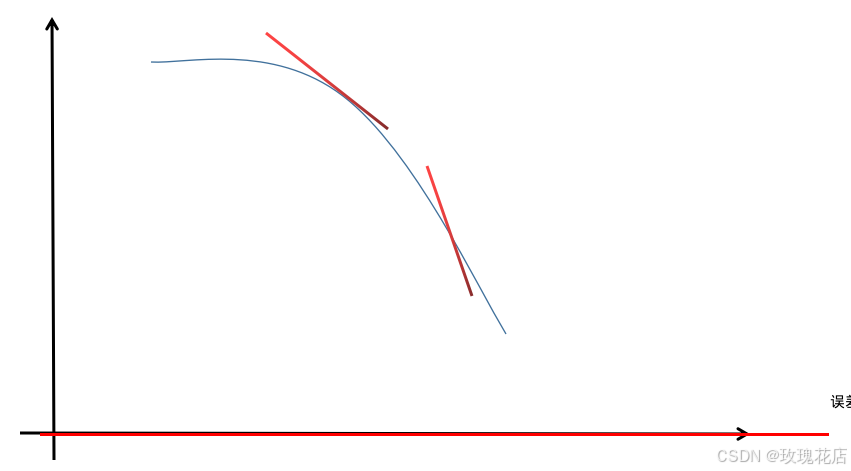
可以看到误差的斜率也是越来越大,但是误差的斜率是负数,所以Kd越大阻尼越大。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









