







 本文介绍了在2019 ROBIO会议上提出的一种创新方法,通过双目立体单目结构光系统融合,解决高反射表面深度测量难题。方法包括坐标系融合、对比格雷码增强和刚性变换优化,成功应用于金属、手机壳和电机部件等复杂物体。
本文介绍了在2019 ROBIO会议上提出的一种创新方法,通过双目立体单目结构光系统融合,解决高反射表面深度测量难题。方法包括坐标系融合、对比格雷码增强和刚性变换优化,成功应用于金属、手机壳和电机部件等复杂物体。
这篇文章发表在 2019年的 International Conference on Robotics and Biomimetics(ROBIO)。
1. 研究问题
研究基于结构光的高反射表面深度测量方法。
2. 研究方法
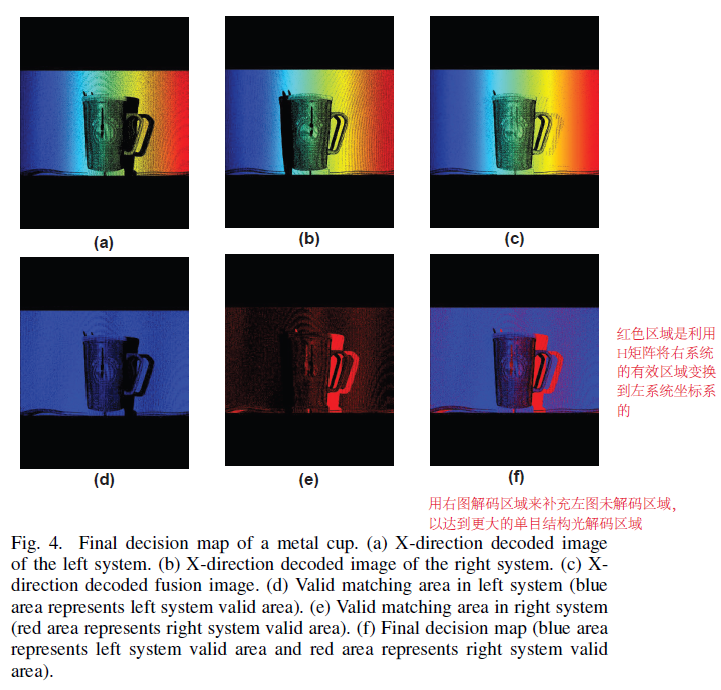
本文提出了一种基于双立体单目结构光系统融合的高反射表面测量方法。本文认为双目结构光系统由两个单目结构光系统组成,以获得不同的扫描视角。右系统的3D数据用于补充左系统因高反射面太亮而丢失的3D数据,实现左右相机的3D数据的融合。利用预定的刚性变换矩阵来提高融合区域的融合质量。此外,创建最终决策图以避免左右系统重复区域的重建,以确保非融合区域的准确性,从而实现单目系统的准确性。
结构光方法无法对高光表面进行深度测量,传统方法是在被测物体表面喷涂一层薄薄的减反射涂层,使表面的反射特性变为漫反射面,然后对目标进行测量了。但这种方法明显有很大的局限性。
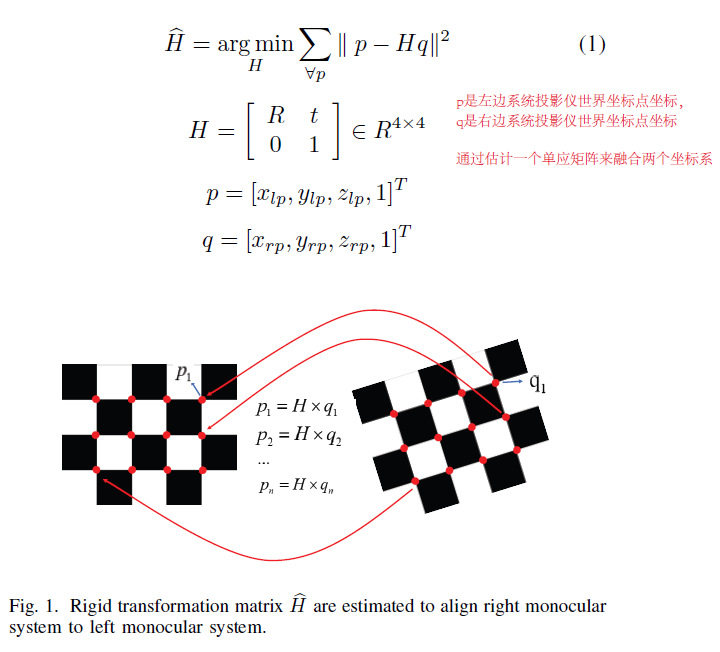
2.1 双单目坐标系融合
本文利用张氏标定法对双单目结构光系统进行标定,左右两个系统共用一个投影仪世界坐标系,但是如果直接基于该坐标系融合的话,会产生较大的重建误差,这是因为两个系统的标定都存在偏差。因此本文提出基于单应矩阵估计的方法来减小融合误差。
2.2 深度测量原理
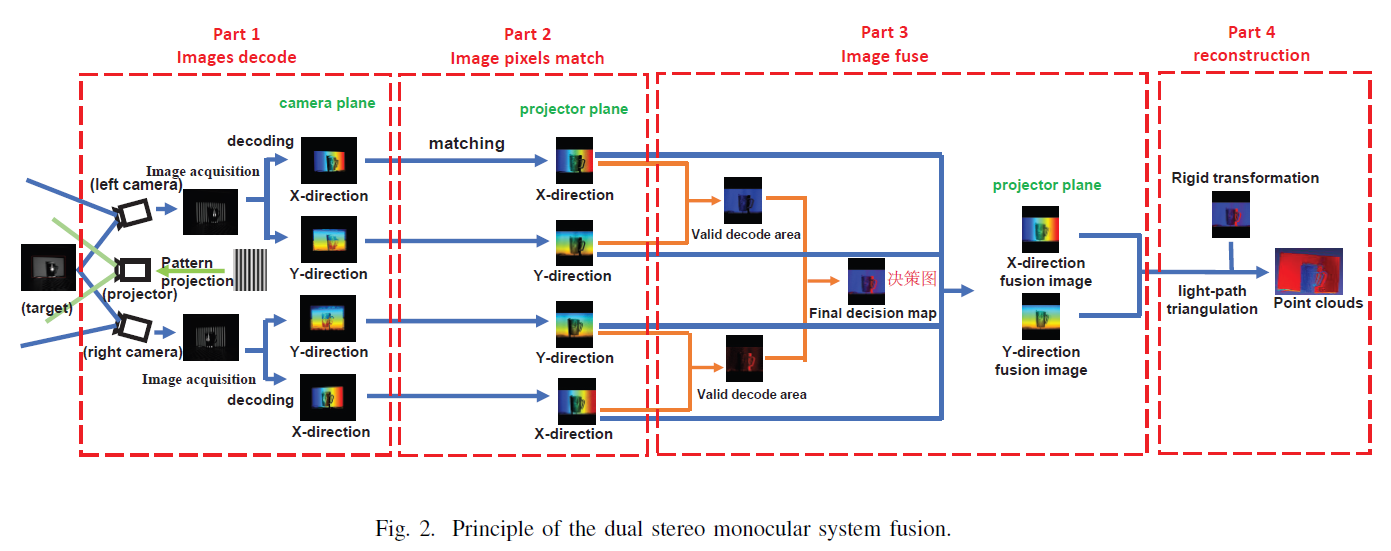
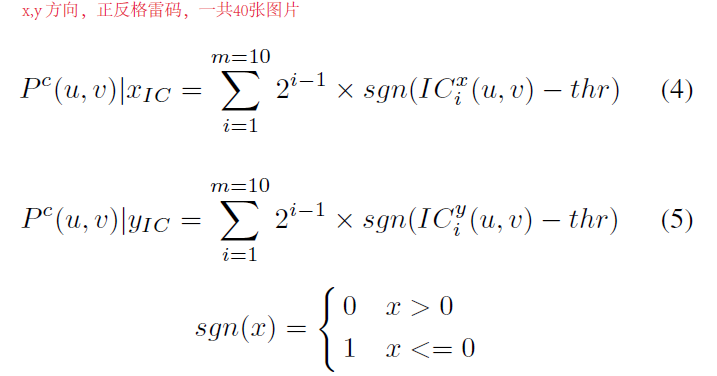
1.第一阶段:对比格雷码法
投射两个方向的正反格雷码,以提高格雷码解码的鲁棒性。

解码:
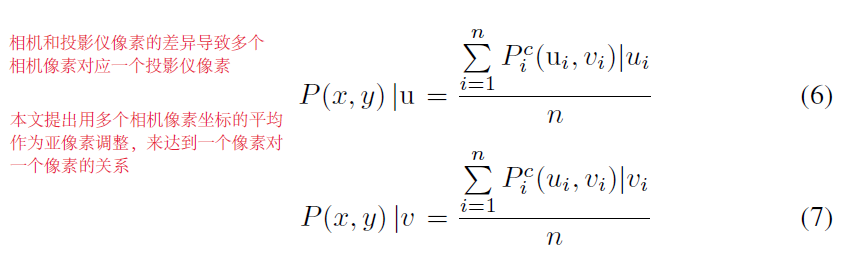
2.亚像素匹配
3.最终决策图
4.刚性变换
其实这一步包含在第三步了,只不过这里是作为一个创新点单独提出来写。
3. 实验结果
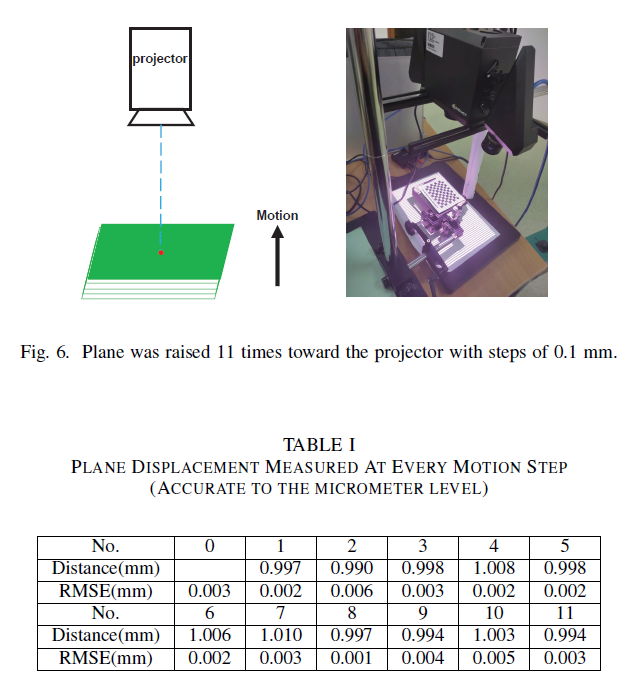
原型系统

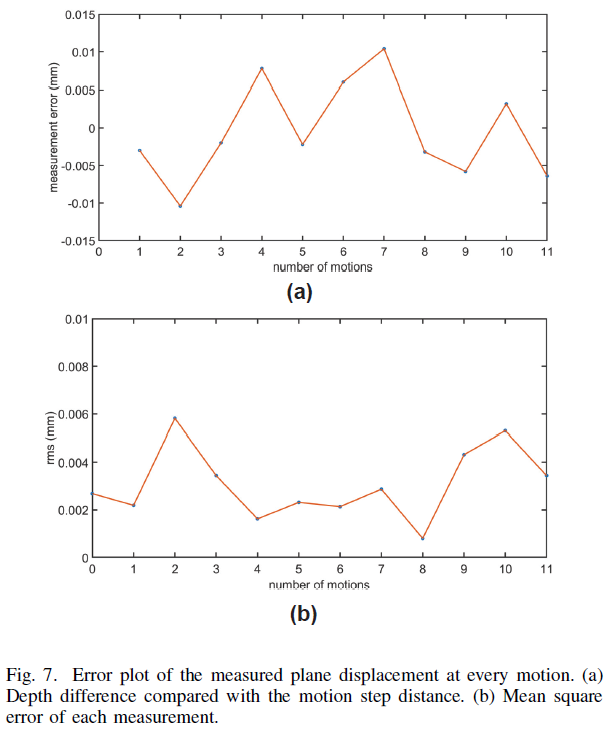
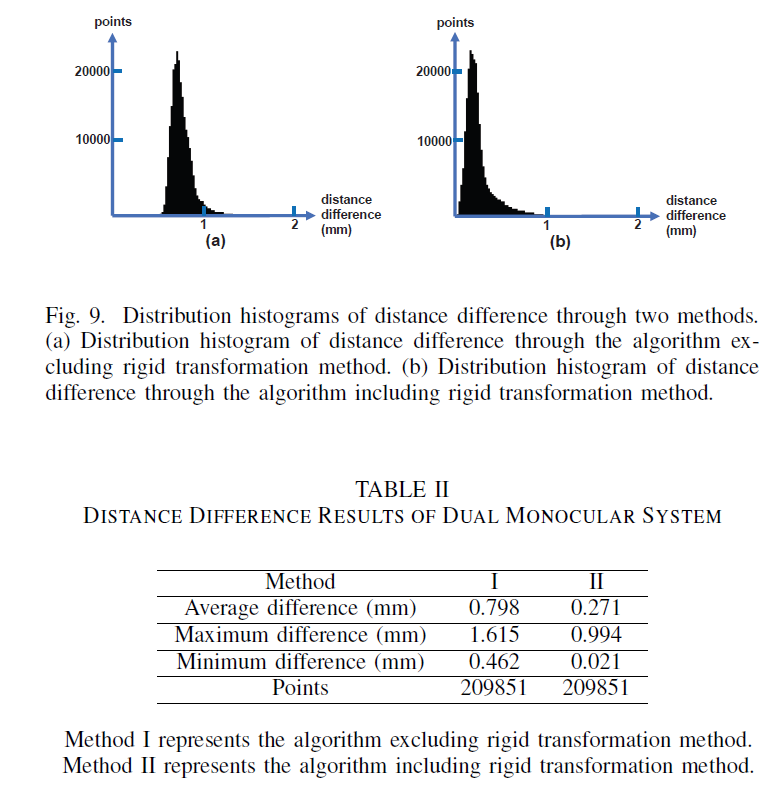
3.1 误差分析
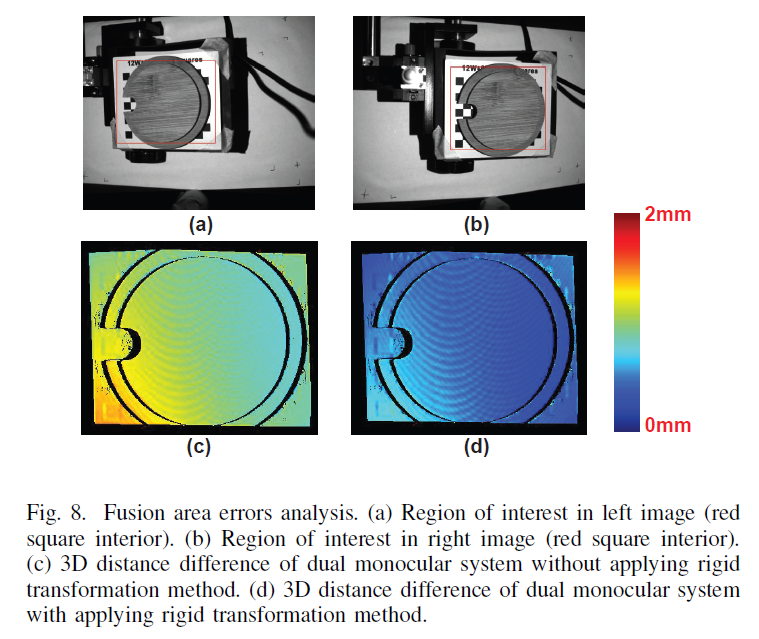
3.2 刚性变换融合误差分析
3.3 复杂物体重建
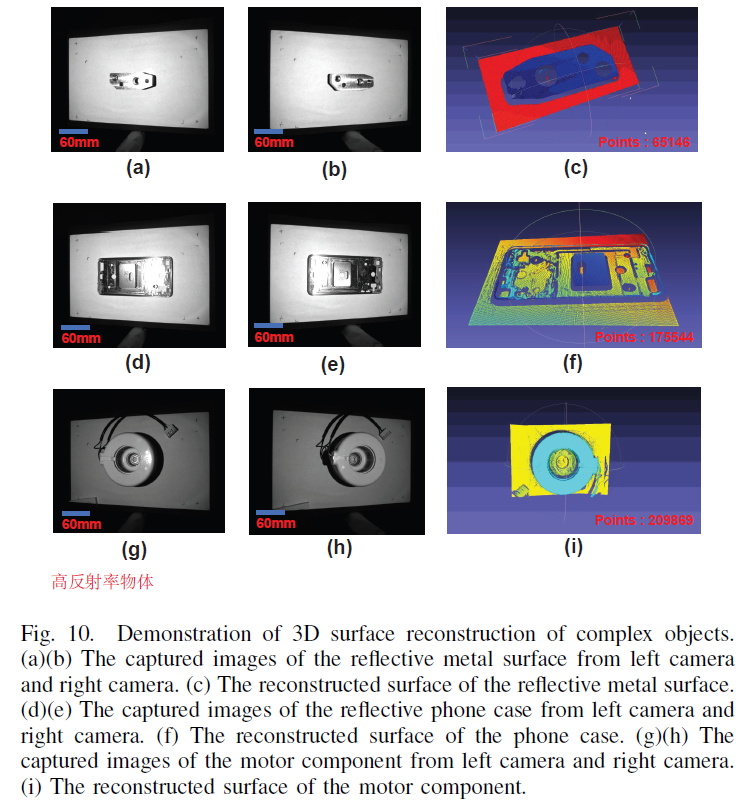
4. 结论
本文提出的双单目结构光系统和深度测量算法能够对金属表面、手机壳和电机部件等各种复杂物体进行测量,能够解决高反射表面测量问题和遮挡问题。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









