






1.获取两个vtkPolyData数据


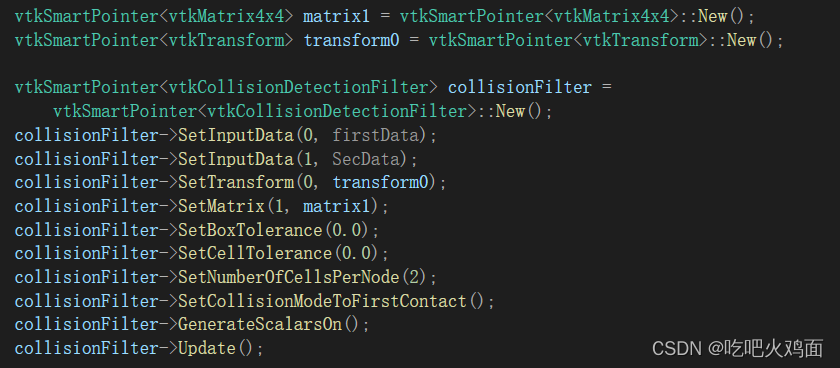
2.使用vtkCollisionDetectionFilter将读取的数据传入应用
必须添加matrix和transform,否则无效
SetCollisionModeToFirstContact是获取第一次碰撞相交的块,可以使用SetCollisionModeToAllContacts来获取全部
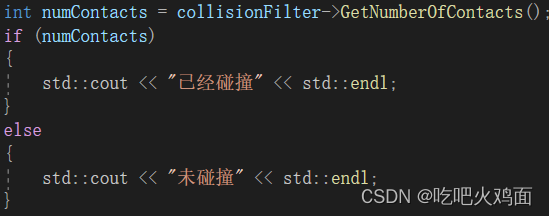
3.判断是否碰撞
1.获取两个vtkPolyData数据
2.使用vtkCollisionDetectionFilter将读取的数据传入应用
必须添加matrix和transform,否则无效
SetCollisionModeToFirstContact是获取第一次碰撞相交的块,可以使用SetCollisionModeToAllContacts来获取全部
3.判断是否碰撞

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























