







 本文介绍了如何使用功能包对Kinect的RGB相机和红外相机(深度)进行实时标定。首先,详细说明了安装和运行功能包的步骤,包括设置棋盘格的尺寸和边长。接着,解释了标定过程,通过调整棋盘格的位置使不同参数变绿后进行标定,并保存结果。最后展示了RGB相机和红外相机的标定效果。
本文介绍了如何使用功能包对Kinect的RGB相机和红外相机(深度)进行实时标定。首先,详细说明了安装和运行功能包的步骤,包括设置棋盘格的尺寸和边长。接着,解释了标定过程,通过调整棋盘格的位置使不同参数变绿后进行标定,并保存结果。最后展示了RGB相机和红外相机的标定效果。
安装功能包
rosdep install camera_calibration运行功能包
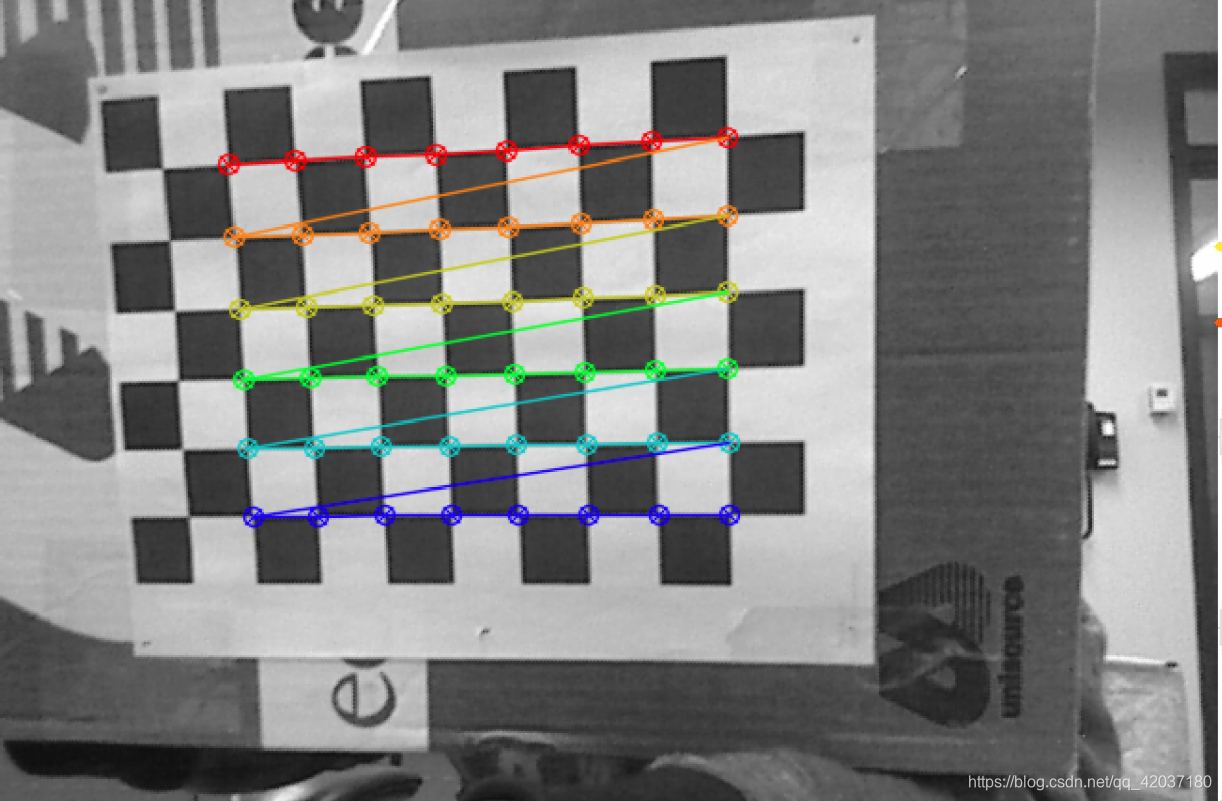
首先标定RGB相机
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.025 image:=/camera/rgb/image_color camera:=/camera/rgbsize 8x6: 标定所用棋盘格内部(内部!)角点的个数, 我所用的为6x8
square 0.025: 棋盘格每个小正方形的边长, 我所用的为2.5cm
image: 订阅的图像
camera: 发布到设置参数的服务器
功能包打开后(右侧功能栏颜色可能比较浅)
左右移动棋盘格使X变为绿色 上下移动棋盘格是Y变为绿色 前后移动棋盘格使Size变为绿色 倾斜棋盘格使skew变为绿色
都变为绿色后点击calibrate,此时可能会卡住一段时间,耐心等待后点击save,commit
将标定文件移动到 .ros/camera_info 文件夹中(通常软件包会自动完成该任务)
下附我的标定文件
标定红外相机(深度)
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.025 image:=/camera/ir 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 6万+
6万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









