




 本文分享了环形队列和消息队列的相关内容。环形队列是首尾相连的FIFO数据结构,用数组线性空间实现,常用于通信领域。消息队列常用于任务间通信,在RTOS中常见。文中还介绍了二者的特性、原理、阻塞机制,并对比了异同,建议都进行研究。
本文分享了环形队列和消息队列的相关内容。环形队列是首尾相连的FIFO数据结构,用数组线性空间实现,常用于通信领域。消息队列常用于任务间通信,在RTOS中常见。文中还介绍了二者的特性、原理、阻塞机制,并对比了异同,建议都进行研究。
已剪辑自: https://mp.weixin.qq.com/s/opF5FCDRarYwGhrG4gGCWQ
“环形队列”和“消息队列”在嵌入式领域有应用非常广泛,相信有经验的嵌入式软件工程师对它们都不陌生。
但经常看到一些初学者问一些相关的问题,今天就来分享一下关于“环形队列”和“消息队列”的内容。
环形队列是在实际编程极为有用的数据结构,它是一个首尾相连的FIFO的数据结构,采用数组的线性空间,数据组织简单,能很快知道队列是否满为空,能以很快速度的来存取数据。
环形队列通常用于通信领域,比如UART、USB、CAN、网络等。
内存上没有环形的结构,因此环形队列实上是数组的线性空间来实现。当数据到了尾部它将转回到0位置来处理。
因此环列队列的逻辑:将数组元素q[0]与q[MAXN-1]连接,形成一个存放队列的环形空间。
为了方便读写,还要用数组下标来指明队列的读写位置。head/tail.其中head指向可以读的位置,tail指向可以写的位置。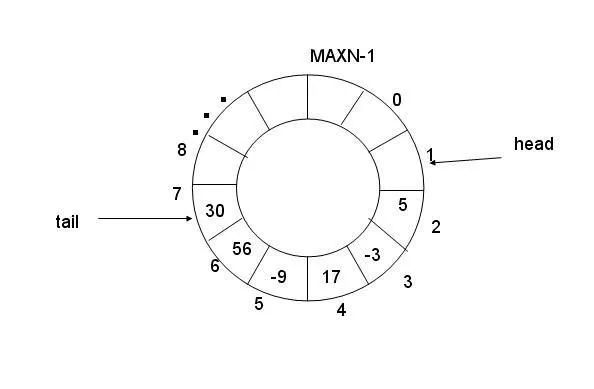 环形队列的关键是判断队列为空,还是为满。当tail追上head时,队列为满时;当head追上tail时,队列为空。但如何知道谁追上谁,还需要一些辅助的手段来判断. 如何判断环形队列为空,为满有两种判断方法:a.附加一个标志位tag
环形队列的关键是判断队列为空,还是为满。当tail追上head时,队列为满时;当head追上tail时,队列为空。但如何知道谁追上谁,还需要一些辅助的手段来判断. 如何判断环形队列为空,为满有两种判断方法:a.附加一个标志位tag
- 当head赶上tail,队列空,则令tag=0
- 当tail赶上head,队列满,则令tag=1
b.限制tail赶上head,即队尾结点与队首结点之间至少留有一个元素的空间。
- 队列空: head==tail
- 队列满: (tail+1)% MAXN ==head
a.采用第一个环形队列有如下结构:
typedef struct ringq{ int head; /* 头部,出队列方向*/ int tail; /* 尾部,入队列方向*/ int tag ; int size ; /* 队列总尺寸 */ int space[RINGQ_MAX]; /* 队列空间 */}RINGQ;
初始化状态:
q->head = q->tail = q->tag = 0;
队列为空:
( q->head == q->tail) && (q->tag == 0)
队列为满 :
((q->head == q->tail) && (q->tag == 1))
入队操作,如队列不满,则写入:
q->tail = (q->tail + 1) % q->size ;
出队操作,如果队列不空,则从head处读出。下一个可读的位置在:
q->head = (q->head + 1) % q->size
头文件ringq.h:
#ifndef __RINGQ_H__#define __RINGQ_H__
#ifdef __cplusplusextern "C" {#endif
#define QUEUE_MAX 20
typedef struct ringq{ int head; /* 头部,出队列方向*/ int tail; /* 尾部,入队列方向*/ int tag ; /* 为空还是为满的标志位*/ int size ; /* 队列总尺寸 */ int space[QUEUE_MAX]; /* 队列空间 */}RINGQ;
/* 第一种设计方法: 当head == tail 时,tag = 0 为空,等于 = 1 为满。*/
extern int ringq_init(RINGQ * p_queue);
extern int ringq_free(RINGQ * p_queue);
/* 加入数据到队列 */extern int ringq_push(RINGQ * p_queue,int data);
/* 从队列取数据 */extern int ringq_poll(RINGQ * p_queue,int *p_data);
#define ringq_is_empty(q) ( (q->head == q->tail) && (q->tag == 0))
#define ringq_is_full(q) ( (q->head == q->tail) && (q->tag == 1))
#define print_ringq(q) printf("ring head %d,tail %d,tag %d\n", q->head,q->tail,q->tag);#ifdef __cplusplus}#endif
#endif /* __RINGQ_H__ */
#include <stdio.h>#include "ringq.h"
int ringq_init(RINGQ * p_queue){ p_queue->size = QUEUE_MAX ;
p_queue->head = 0; p_queue->tail = 0;
p_queue->tag = 0;
return 0;}
int ringq_free(RINGQ * p_queue){ return 0;}
int ringq_push(RINGQ * p_queue,int data){ print_ringq(p_queue);
if(ringq_is_full(p_queue)) {
printf("ringq is full\n"); return -1; }
p_queue->space[p_queue->tail] = data;
p_queue->tail = (p_queue->tail + 1) % p_queue->size ;
/* 这个时候一定队列满了*/ if(p_queue->tail == p_queue->head) { p_queue->tag = 1; }
return p_queue->tag ; }
int ringq_poll(RINGQ * p_queue,int * p_data){ print_ringq(p_queue); if(ringq_is_empty(p_queue)) {
printf("ringq is empty\n"); return -1; }
*p_data = p_queue->space[p_queue->head];
p_queue->head = (p_queue->head + 1) % p_queue->size ;
/* 这个时候一定队列空了*/ if(p_queue->tail == p_queue->head) { p_queue->tag = 0; } return p_queue->tag ;}
看到源代码,相信大家就明白其中原理了。其实还有不采用tag,或者其他一些标志的方法,这里就不进一步展开讲述了,感兴趣的读者可以自行研究一下。
在RTOS中基本都有消息队列这个组件,也是使用最常见的组件之一。
消息队列是一种常用于任务间通信的数据结构,队列可以在任务与任务间、中断和任务间传递信息,实现了任务接收来自其他任务或中断的不固定长度的消息。
通过消息队列服务,任务或中断服务程序可以将一条或多条消息放入消息队列中。同样,一个或多个任务可以从消息队列中获得消息。
使用消息队列数据结构可以实现任务异步通信工作。
2.消息队列的特性RTOS消息队列,常见特性:
- 消息支持先进先出方式排队,支持异步读写工作方式。
- 读写队列均支持超时机制。
- 消息支持后进先出方式排队,往队首发送消息(LIFO)。
- 可以允许不同长度(不超过队列节点最大值)的任意类型消息。
- 一个任务能够从任意一个消息队列接收和发送消息。
- 多个任务能够从同一个消息队列接收和发送消息。
- 当队列使用结束后,可以通过删除队列函数进行删除。
3.消息队列的原理这里以 FreeRTOS 为例进行说明。FreeRTOS 的消息队列控制块由多个元素组成,当消息队列被创建时,系统会为控制块分配对应的内存空间,用于保存消息队列的一些信息如消息的存储位置,头指针 pcHead、尾指针 pcTail、消息大小 uxItemSize 以及队列长度 uxLength 等。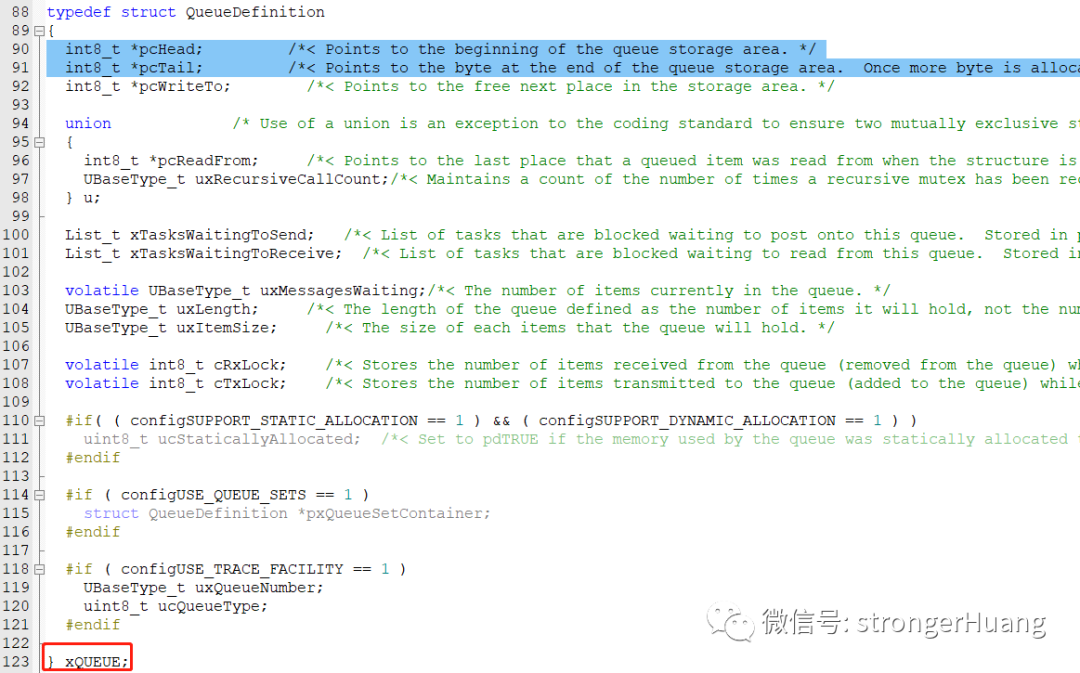
比如创建消息队列:
xQueue = xQueueCreate(QUEUE_LEN, QUEUE_SIZE);
任务或者中断服务程序都可以给消息队列发送消息,当发送消息时,如果队列未满或者允许覆盖入队,FreeRTOS 会将消息拷贝到消息队列队尾,否则,会根据用户指定的阻塞超时时间进行阻塞,在这段时间中,如果队列一直不允许入队,该任务将保持阻塞状态以等待队列允许入队。当其它任务从其等待的队列中读取入了数据(队列未满),该任务将自动由阻塞态转移为就绪态。当等待的时间超过了指定的阻塞时间,即使队列中还不允许入队,任务也会自动从阻塞态转移为就绪态,此时发送消息的任务或者中断程序会收到一个错误码 errQUEUE_FULL。
发送紧急消息的过程与发送消息几乎一样,唯一的不同是,当发送紧急消息时, 发送的位置是消息队列队头而非队尾,这样,接收者就能够优先接收到紧急消息,从而及时进行消息处理。
当某个任务试图读一个队列时,其可以指定一个阻塞超时时间。在这段时间中,如果队列为空,该任务将保持阻塞状态以等待队列数据有效。当其它任务或中断服务程序往其等待的队列中写入了数据,该任务将自动由阻塞态转移为就绪态。当等待的时间超过了指定的阻塞时间,即使队列中尚无有效数据,任务也会自动从阻塞态转移为就绪态。
当消息队列不再被使用时,应该删除它以释放系统资源,一旦操作完成, 消息队列将被永久性的删除。
消息队列的运作过程具体见下图: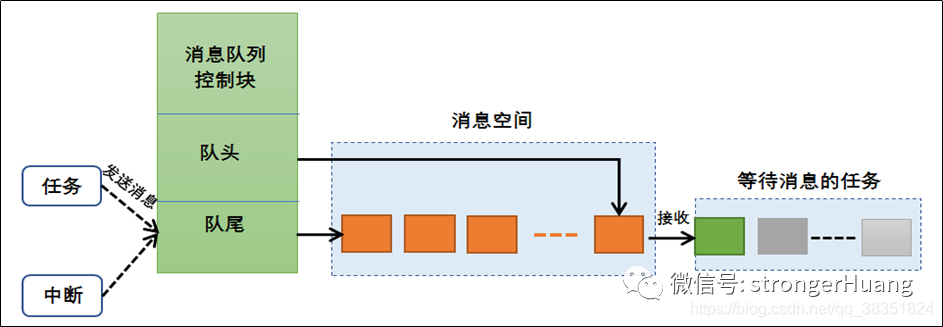
**4.消息队列的阻塞机制****出队阻塞:**当且仅当消息队列有数据的时候,任务才能读取到数据,可以指定等待数据的阻塞时间。
**入队阻塞:**当且仅当队列允许入队的时候,发送者才能成功发送消息;队列中无可用消息空间时,说明消息队列已满,此时,系统会根据用户指定的阻塞超时时间将任务阻塞。
假如有多个任务阻塞在一个消息队列中,那么这些阻塞的任务将按照任务优先级进行排序,优先级高的任务将优先获得队列的访问权。
“环形队列”和“消息队列”的异同
通过以上分析,你会发现“环形队列”和“消息队列”之间有很多共同点:1.他们都是一种数据结构,结构中都包含头、尾、标志等信息;**2.它们都是分配一块连续的内存空间,且都可以分配多个队列。**3.应用场景类似,有大量吞吐数据的情况下,比如通信领域。…
当然,他们也有一些不同点:
1.“环形队列”可以独立使用,也可以结合操作系统使用。而消息队列依赖RTOS(有些RTOS的参数信息)。2.“环形队列”占用资源更小,更适合于资源较小的系统中。3.“消息队列”结合RTOS应用更加灵活,比如延时、中断传输数据等。…
最后,这两种队列应用都比较广,建议抽空都研究一下。



















 311
311

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











