




 本文介绍了一种基于广度优先搜索算法求解八数码问题的方法,包括状态编码、搜索算法实现及去重策略等关键步骤。
本文介绍了一种基于广度优先搜索算法求解八数码问题的方法,包括状态编码、搜索算法实现及去重策略等关键步骤。
采用状态空间法求解八数码问题
1. 问题描述
八数码难题也称九宫问题,它是在3×3的方格棋盘上,分别放置了表有数字1、2、3、4、5、6、7、8的八张牌,初始状态 S 0 S_0 S0,目标状态 S g S_g Sg,要求程序能输入任意的初始状态和目标状态,通过空格来移动八张牌使得棋盘由初始状态到达目标状态。移动规则为:每次只能将与空格(上下左右)相邻的一个数字平移到空格中。
2. 算法思路
2.1 判断是否有解
给定任意符合条件的初始状态
S
0
S_0
S0和目标状态
S
g
S_g
Sg,并不一定存在解路线使得将初始状态转化为目标状态。因此,在求解前需要判断是否有解。
八数码问题的一个状态实际上是0~9的一个排列,空格用0表示,对于任意给定的初始状态和目标状态,不一定有解,也就是说从初始状态不一定能到达目标状态。因为排列有奇排列和偶排列两类,排列只能在同类排列之间转化,而从奇排列不能转化成偶排列或相反。
如果一个数字0~8的随机排列871526340,用
F
(
X
)
F(X)
F(X)表示数字
X
X
X前面比它小的数的个数,全部数字的
F
(
X
)
F(X)
F(X)之和为
Y
=
∑
(
F
(
X
)
)
Y=\sum(F(X))
Y=∑(F(X)),如果
Y
Y
Y为奇数则称原数字的排列是奇排列,如果
Y
Y
Y为偶数则称原数字的排列是偶排列。
例如:871526340这个排列的Y=0+0+0+1+1+3+2+3+0=10,10是偶数,所以是偶排列。871625340,Y=0+0+0+1+1+2+2+3+0=9,9是奇数,所以是奇排列。
因此,可以在运行程序前检查初始状态和目标状态的排列是否相同,相同则问题可解,接着采用搜索算法求解,否则无解。
2.2 广度优先搜索求解
我们定义结点
n
o
d
e
node
node ,搜索中每次出现的一个棋盘都相当于一个结点
n
o
d
e
node
node,我们定义一个队列
q
u
e
u
e
queue
queue用于保存搜索中所出现的所有棋盘结点,一个棋盘结点为队列的一个成员。
广度优先搜索的基本思想是:
从初始结点
h
h
h开始, 逐层地对结点进行扩展并考察它是否为目标结点,若不是目标结点,则放入待考察队列中;在第 n 层的结点没有全部扩展并考察之前,不对第 n+1 层的结点进行扩展。队列中的结点总是按进入的先后顺序排列,先进入的结点排在前面,后进入的排在后面。其搜索过程如图1所示。

2.3 去重
在搜索过程中,可能会同一状态重复搜索,有很多重复状态节点的扩展,会浪费时间。为解决这一问题使用哈希 m a p map map, m a p map map键值为已经扩展过的状态节点编码后的字符串。当需要扩展状态节点 i i i时,若 i i i已经在 m a p map map中,即已经扩展过,就不再扩展,否则对其进行扩展,并将 i i i加入到 m a p map map中。这里的哈希 m a p map map使用C++ STL中的 u n o r d e r e d _ m a p unordered\_map unordered_map实现。
2.4 输出解路线
每个节点保存其父节点,该节点由其父节点扩展而来,当搜索到目标状态时,根据父节点信息回溯回去,得到由初始状态到目标状态的解路线。
3. 数据结构及函数说明
3.1 数据结构
struct node {
int a[3][3]; //九宫格
node* p; //指向当前节点的父节点
node* next; //指向队列中下一个节点
node(string s) {
for(int i=0;i<len;i++) {
for(int j=0;j<len;j++) a[i][j] = s[i*len+j]-'0';
}
p = NULL;
next = NULL;
}
node():p(NULL), next(NULL) {}
};
定义一个结构体node表示广度优先搜索中的一个状态节点,其中:a是3*3二维数组,用来表示九宫格中每个位置的数字;p是指针,用来指向当前节点的父节点,这里的父节点是指当前节点由其父节点扩展而来;next是指针,指向广度搜索算法队列中的下一个节点;两个构造函数,分别用于有参数和无参数时结构体的初始化。
3.2 函数说明
3.2.1 input
void input(node& start, node& target),键盘输入八数码初始状态和目标状态。
3.2.2 haveSolution
bool haveSolution(node start, node target),判断输入的初始状态和目标状态是否有解,若有解返回true,否则返回false。
3.2.3 deCode
string deCode(node t),将node t中的八数码进行编码变成字符串,并返回编码后的字符串。
3.2.4 explore
bool explore(node cur, node& ex, char dic),该函数实现对cur状态节点进行指定方向的扩展,并通过ex参数将扩展后的结果返回,dic取值有“u,d,l,r”,分别表示空格向上、下、左、右移。若扩展成功返回true,否则返回false。
3.2.5 getSolution
node* getSolution(node* start, node* target),输入参数为指向初始状态节点的指针和指向目标状态节点的指针;该函数计算出一条从初始状态转化为目标状态的一条路线,并返回指向该路线最后一个节点的指针。
3.2.6 print
void print(node* t),输入参数t即为getSolution得到的指向结果路线最后一个节点的指针,print函数输出完整路线。
4. 流程图
程序总体流程图如图2所示。

5. C++代码
#include <bits/stdc++.h>
#include <string>
#define len 3
using namespace std;
struct node {
int a[3][3]; //九宫格
node* p; //指向当前节点的父节点
node* next; //指向队列中下一个节点
node(string s) {
for(int i=0;i<len;i++) {
for(int j=0;j<len;j++) a[i][j] = s[i*len+j]-'0';
}
p = NULL;
next = NULL;
}
node():p(NULL), next(NULL) {}
};
void input(node& start, node& target);
bool haveSolution(node start, node target);
string deCode(node t);
bool explore(node cur, node& ex, char dic);
node* getSolution(node* start, node* target);
void print(node* t);
int main() {
node start, target;
input(start, target);
if(!haveSolution(start, target)) {
cout<<"奇偶不同,无解!!!"<<endl;
return 0;
}
node* t = getSolution(&start, &target);
if(t == NULL) cout<<"无解!!!"<<endl;
else print(t);
system("pause");
return 0;
}
void input(node& start, node& target) {
//输入任意合法的初始状态和目标状态
cout<<"请输入八数码初始状态,以3*3矩阵形式输入,空格用0表示"<<endl;
for(int i=0;i<len;i++) {
for(int j=0;j<len;j++) cin>>start.a[i][j];
}
cout<<"请输入八数码目标状态,要求同初始状态"<<endl;
for(int i=0;i<len;i++) {
for(int j=0;j<len;j++) cin>>target.a[i][j];
}
}
bool haveSolution(node start, node target) {
//判断初始状态和目标状态是否同为奇排列或同为偶排列,即是否有解
string s = "", t = "";
int sc = 0, tc = 0;
for(int i=0;i<len;i++) {
for(int j=0;j<len;j++) {
s += start.a[i][j]+'0';
t += target.a[i][j]+'0';
}
}
for(int i=1;i<s.length();i++) {
for(int j=0;j<i;j++) {
if(s[j]<s[i] && s[i]!='0' && s[j]!='0') sc++;
if(t[j]<t[i] && t[i]!='0' && t[j]!='0') tc++;
}
}
if(sc%2 == tc%2) return true;
else return false;
}
string deCode(node t) {
//将九宫格中的数字编码为字符串
string r = "";
for(int i=0;i<len;i++) {
for(int j=0;j<len;j++) r += t.a[i][j]+'0';
}
return r;
}
bool explore(node cur, node& ex, char dic) {
//对当前状态cur进行扩展,dic为'u'表示空格向上移,'d'表示空格向下移
//'l'表示向左移,'r'表示向右移,若无法扩展,返回false,若扩展成功,返回true,
//并通过ex参数返回扩展后的节点
int r = 0, c = 0;
for(int i=0;i<len;i++) {
for(int j=0;j<len;j++) {
if(cur.a[i][j] == 0) {
r = i;
c = j;
break;
}
}
}
if(dic == 'u') {
if(r == 0) return false;
else swap(ex.a[r][c], ex.a[r-1][c]);
}
else if(dic == 'd') {
if(r == len-1) return false;
else swap(ex.a[r][c], ex.a[r+1][c]);
}
else if(dic == 'l') {
if(c == 0) return false;
else swap(ex.a[r][c], ex.a[r][c-1]);
}
else {
if(c == len-1) return false;
else swap(ex.a[r][c], ex.a[r][c+1]);
}
return true;
}
node* getSolution(node* start, node* target) {
unordered_map<string,bool> m;
node *front = start, *rear = front;
string tarCode = deCode(*target);
while(front!=NULL) {
string curCode = deCode(*front);
if(curCode == tarCode) {
//找到目标状态
return front;
}
else {
if(m.find(curCode)==m.end()) {
//当前状态还未扩展过,进行扩展
m[curCode] = true;
node* dic[4];
char op[4] = {'u','d','l','r'};
for(int i=0;i<4;i++) dic[i] = new node(curCode);
for(int i=0;i<4;i++) {
if(explore(*front, *dic[i], op[i])) {
dic[i]->p = front;
rear->next = dic[i];
rear = rear->next;
}
}
}
}
front = front->next;
}
return NULL;
}
void print(node* t) {
stack<node> s;
while(t!=NULL) {
s.push(*t);
t = t->p;
}
cout<<endl<<"转化路线"<<endl;
while(!s.empty()) {
node cur = s.top();
s.pop();
for(int i=0;i<len;i++) {
for(int j=0;j<len;j++) cout<<cur.a[i][j]<<" ";
cout<<endl;
}
cout<<endl;
}
}
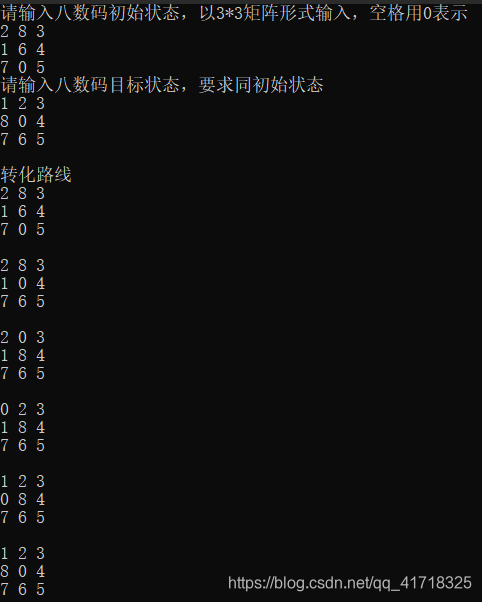
6. 代码运行结果
代码运行结果如图3所示。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











