









 该文章提出了一种非数据驱动的曲面重建方法,利用改进的高斯公式对三维点云进行建模,通过参数化高斯公式构建线性系统求解表面。文章强调了宽度函数对细节和平滑度的影响,并采用自适应正则化和采样密度优化求解过程,以应对大点云数据的计算复杂性。虽然存在参数调整的挑战,但该方法为曲面重建提供了新思路,有望促进相关研究的发展。
该文章提出了一种非数据驱动的曲面重建方法,利用改进的高斯公式对三维点云进行建模,通过参数化高斯公式构建线性系统求解表面。文章强调了宽度函数对细节和平滑度的影响,并采用自适应正则化和采样密度优化求解过程,以应对大点云数据的计算复杂性。虽然存在参数调整的挑战,但该方法为曲面重建提供了新思路,有望促进相关研究的发展。
基于改进高斯公式的曲面重建 发布在ACM Transactions on Graphics期刊上的一篇关于三维点云重建模型的文章,该文章基于非数据驱动的方式,通过高斯公式去拟合点云表面的等值面,然后从等值面中提取网格曲面,使用marching cubes提取表面。
该论文的创新点为:将高斯公式参数化,以无定向点云进行表面重建表述为求解线性系统,作为i一个严谨的数学公式,可以通过非定向输入确定表面;通过高斯公式可以获取一个一致去向向外的表面。
如下核心公式:
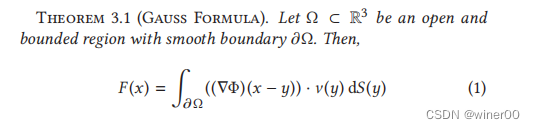
该公式通过计算后可以得到每个点对应的水平面,可通过其等值面重建曲面。
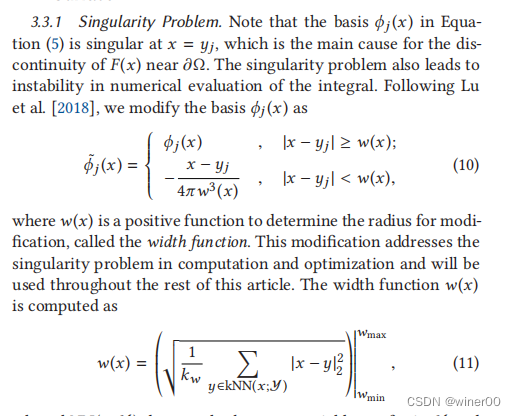
我觉得比较优秀的点子:宽度函数,宽度函数w修改基础函数的半径,导致附近平滑的隐式场,但是论文中人工确定w的上下界,通过认为控制它的边界;且选择一个合适的w非常重要,如果过大,局部细节会消除;太小,对于提取的网格不够平滑,如何以模型的大小自适应宽度函数我觉的还是挺重要的。
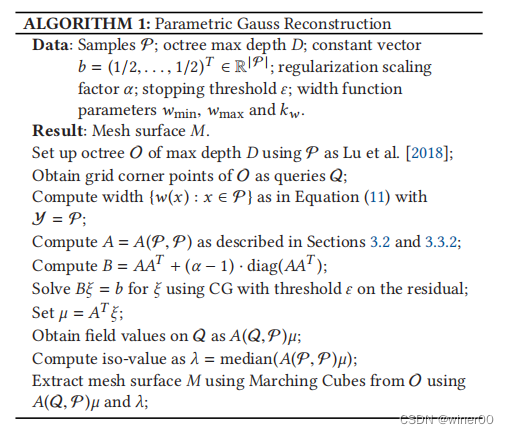
上面是他的算法流程,我认为求解B的复杂度受到点云大小的影响,计算的大小是输入点云的二次方,使投入点云过大会影响算法速度。
论文中通过迭代的方式求解u,A表示一个n*n的矩阵,表示每个点之间的关系,其中上面求解出的
λ作为重建曲面marching cubes 的level。
方法分析: 采用自适应正则化和采样密度,使求解u时能够一个迭代的方式解决一个近似解。
使用的不同参数的无噪声以及统一采样模型的重建。如果没有应用正则化,对于干净的模型出现虚假的模型呈现,并且该参数不能过大,随着a的增加重建质量首先会提高之后下降。并且会影响CG的收敛速度,经过实验发现,a代表的残差,a越大,收敛越快。
尽管有这些限制,高斯公式还是提供了一个新的决解方案,当只提供原始点云是,可以寻找表面的指示函数,证明了高斯公式作为一个指导性的定理可以变成一个可行的算法来完成这项任务,可能为曲面重建工作提供一个新的视角,促进这方面的更多研究。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









