






超大图上的表征学习
本文主要参考DataWhale图神经网络组队学习
主要介绍的模型是Cluster-GCN。
模型主体思想
Cluster-GCN提出:
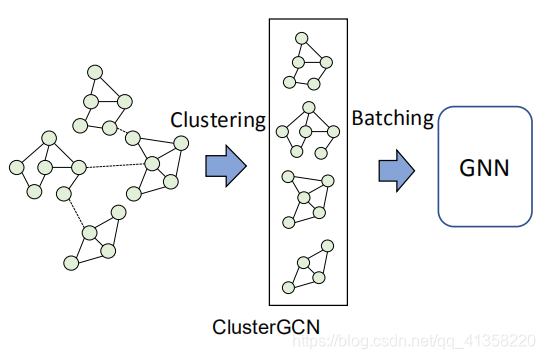
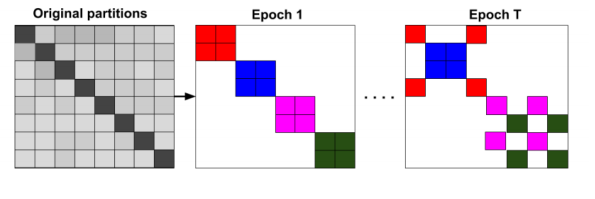
1.利用图节点聚类算法将一个图的节点划分为 个簇,每一次选择几个簇的节点和这些节点对应的边构成一个子图,然后对子图做训练。
2.由于是利用图节点聚类算法将节点划分为多个簇,所以簇内边的数量要比簇间边的数量多得多,所以可以提高表征利用率,并提高图神经网络的训练效率。
3.每一次随机选择多个簇来组成一个batch,这样不会丢失簇间的边,同时也不会有batch内类别分布偏差过大的问题。
4.基于小图进行训练,不会消耗很多内存空间,于是我们可以训练更深的神经网络,进而可以达到更高的精度。
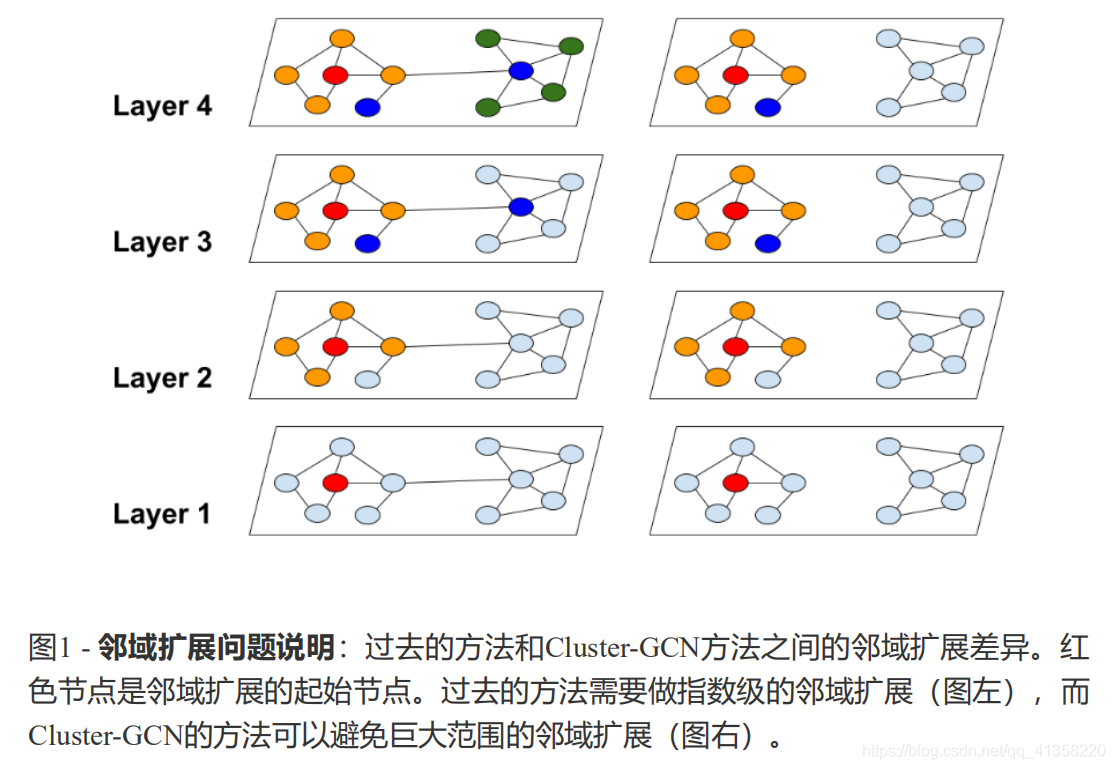
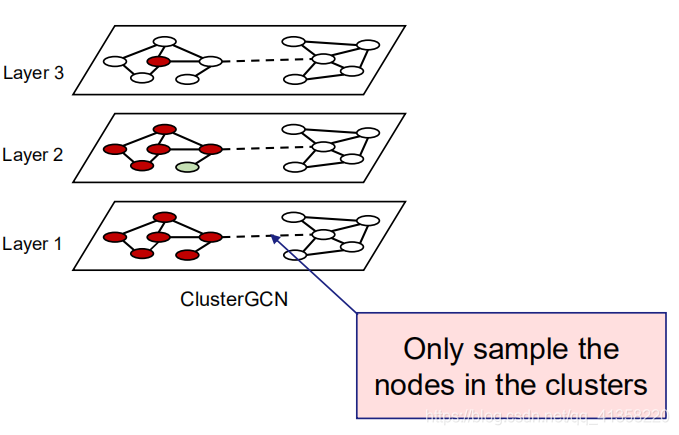
缓解邻域扩展问题
基于有效的聚类算法生成多个簇
分簇后的类别不平衡问题
尽管简单Cluster-GCN方法可以做到较其他方法更低的计算和内存复杂度,但它仍存在两个潜在问题:
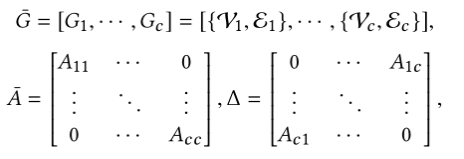
1.图被分割后,一些边(公式(4)中的 部分)被移除,性能可能因此会受到影响。
2.图聚类算法倾向于将相似的节点聚集在一起。因此,单个簇中节点的类别分布可能与原始数据集不同,导致对梯度的估计有偏差。
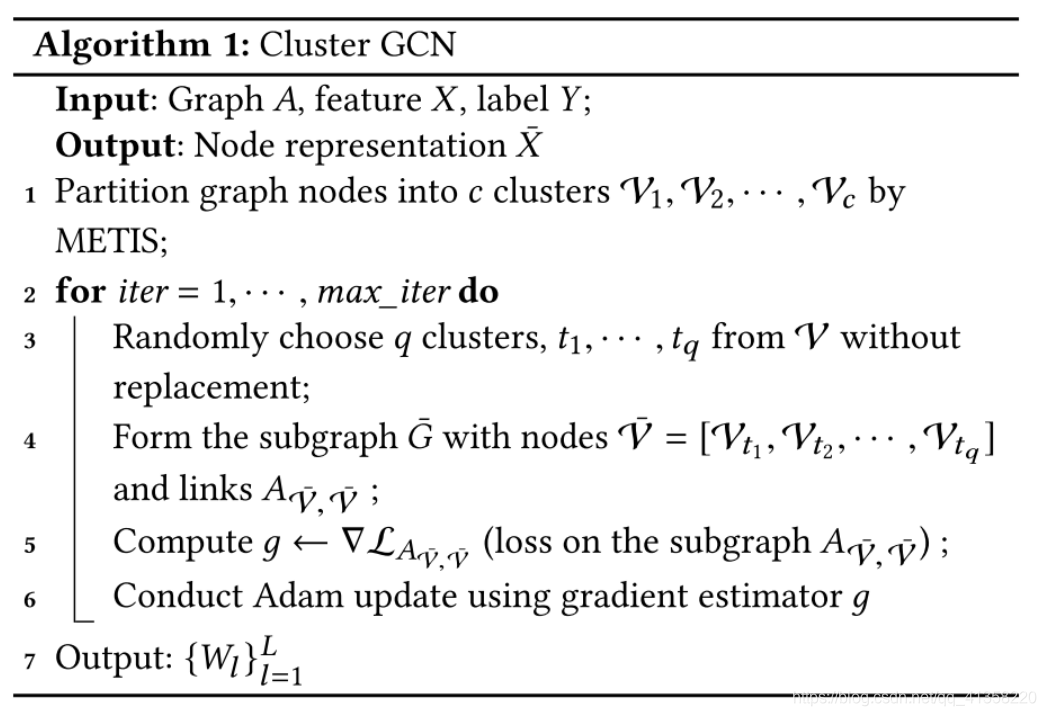
解决方案(随机多簇方法)
算法流程
作业:尝试将数据集切分成不同数量的簇进行实验,然后观察结果并进行比较。
读取数据
import torch
import torch.nn.functional as F
from torch.nn import ModuleList
from tqdm import tqdm
from torch_geometric.datasets import Reddit, Reddit2
from torch_geometric.data import ClusterData, ClusterLoader, NeighborSampler
from torch_geometric.nn import SAGEConv
dataset = Reddit('dataset/Reddit')
data = dataset[0]
data

进行分簇等操作(分为1000簇)
cluster_data = ClusterData(data, num_parts=1000, recursive=False,
save_dir=dataset.processed_dir)
train_loader = ClusterLoader(cluster_data, batch_size=20, shuffle=True,
num_workers=4)
subgraph_loader = NeighborSampler(data.edge_index, sizes=[-1], batch_size=1024,
shuffle=False, num_workers=4)
class Net(torch.nn.Module):
def __init__(self, in_channels, out_channels):
super(Net, self).__init__()
self.convs = ModuleList(
[SAGEConv(in_channels, 128),
SAGEConv(128, out_channels)])
def forward(self, x, edge_index):
for i, conv in enumerate(self.convs):
x = conv(x, edge_index)
if i != len(self.convs) - 1:
x = F.relu(x)
x = F.dropout(x, p=0.5, training=self.training)
return F.log_softmax(x, dim=-1)
def inference(self, x_all):
pbar = tqdm(total=x_all.size(0) * len(self.convs))
pbar.set_description('Evaluating')
# Compute representations of nodes layer by layer, using *all*
# available edges. This leads to faster computation in contrast to
# immediately computing the final representations of each batch.
for i, conv in enumerate(self.convs):
xs = []
for batch_size, n_id, adj in subgraph_loader:
edge_index, _, size = adj.to(device)
x = x_all[n_id].to(device)
x_target = x[:size[1]]
x = conv((x, x_target), edge_index)
if i != len(self.convs) - 1:
x = F.relu(x)
xs.append(x.cpu())
pbar.update(batch_size)
x_all = torch.cat(xs, dim=0)
pbar.close()
return x_all
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model = Net(dataset.num_features, dataset.num_classes).to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=0.005)
def train():
model.train()
total_loss = total_nodes = 0
for batch in train_loader:
batch = batch.to(device)
optimizer.zero_grad()
out = model(batch.x, batch.edge_index)
loss = F.nll_loss(out[batch.train_mask], batch.y[batch.train_mask])
loss.backward()
optimizer.step()
nodes = batch.train_mask.sum().item()
total_loss += loss.item() * nodes
total_nodes += nodes
return total_loss / total_nodes
@torch.no_grad()
def test(): # Inference should be performed on the full graph.
model.eval()
out = model.inference(data.x)
y_pred = out.argmax(dim=-1)
accs = []
for mask in [data.train_mask, data.val_mask, data.test_mask]:
correct = y_pred[mask].eq(data.y[mask]).sum().item()
accs.append(correct / mask.sum().item())
return accs
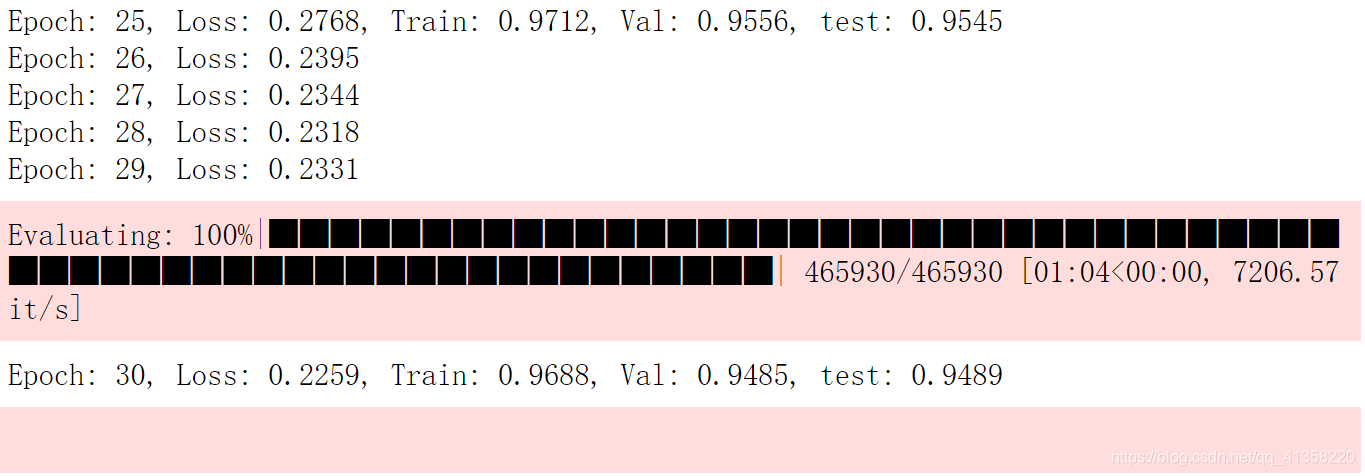
for epoch in range(1, 31):
loss = train()
if epoch % 5 == 0:
train_acc, val_acc, test_acc = test()
print(f'Epoch: {epoch:02d}, Loss: {loss:.4f}, Train: {train_acc:.4f}, '
f'Val: {val_acc:.4f}, test: {test_acc:.4f}')
else:
print(f'Epoch: {epoch:02d}, Loss: {loss:.4f}')

















 4987
4987

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









