







 本文详细记录了在MBR和UEFI引导模式下安装Ubuntu 18.04系统的全过程,包括遇到的困难及解决方案。在MBR模式安装失败后,作者建议切换到UEFI模式,并提供了重装Windows 10的步骤。在删除Ubuntu分区后的重新安装过程中,由于引导项未清除导致的问题,通过删除EFI文件夹的Ubuntu文件夹和修复硬盘错误得以解决。
本文详细记录了在MBR和UEFI引导模式下安装Ubuntu 18.04系统的全过程,包括遇到的困难及解决方案。在MBR模式安装失败后,作者建议切换到UEFI模式,并提供了重装Windows 10的步骤。在删除Ubuntu分区后的重新安装过程中,由于引导项未清除导致的问题,通过删除EFI文件夹的Ubuntu文件夹和修复硬盘错误得以解决。
安装Ubuntu18.04系统踩坑记录
关于MBR和UEFI这两种引导模式
想知道两种引导模式的区别,可以去百度,大概来说MBR是传统的引导模式,一般在老机子上,UEFI引导模式是现在大部分计算机有的引导模式,可以在BIOS里面知道你的系统是用什么引导模式启动的或者可以直接win+r,然后输入msinfo32回车确认进行查看。在下图的BIOS处有注明。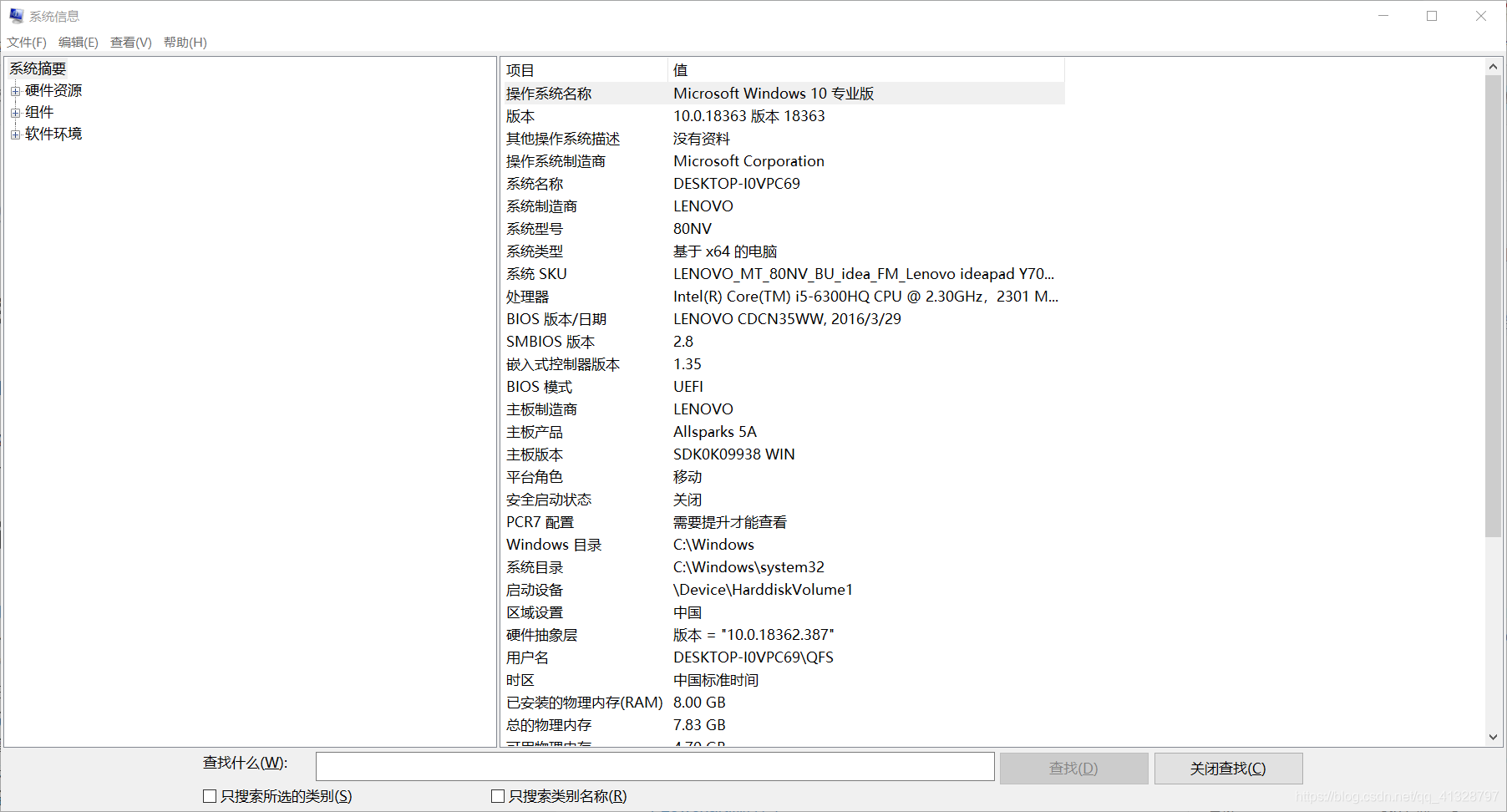
然后如果你的引导模式是传统的,趁早重装系统,按UEFI引导模式重装windows系统吧(血的教训)。如果系统盘是固态硬盘参考这个,机械硬盘可能也可以:参考:百度经验 。
如果你想尝试传统模式安装双系统,参考:博客1 和 博客2 。
我大部分是参考博客1的情况B安装Ubuntu系统的(在我失败前),后期的分区也受这个博客很大影响,博客2可以参考对比。
在MBR模式安装Ubuntu失败
如果失败了,应该是引导进入Ubuntu是会蓝屏,然后显示错误状态0xc000000e,那么恭喜你,还是试试按UEFI引导重装系统吧。
首先在BIOS里面设置一下吧,大概是把boot mode 改成UEFI,然后把secure boot设置成disabled,其他可能根据不同型号电脑有一些其他的设置。参考了这个博客 和一些其他博客,搜索关键词应该是UEFI模式安装Windows10系统。然后这个设置完了之后用U盘装机重装系统,先用U盘制作工具制作一个装机U盘,推荐U盘装机大师和老白菜(不是广告),然后把Windows10镜像文件也放进U盘。然后跟着百度经验重装Windows10。
按UEFI引导模式重装Windows10系统后
然后就可以按照前面提到的博客1 中的情况C或D来安装Ubuntu系统了。然后熬到凌晨,终于成功了,可以在启动的时候选择Ubuntu系统或者Windows系统了。结果一觉醒来,启动是无限闪过system bootorder not found,就是启动不了。然后网上找解决方法,只能找到外网的askUbuntu网站的回答,看不懂。然后只好删掉分区重装了。然后问题又来了。
删除Ubuntu系统的分区之后安装失败
在把Ubuntu安装的分区删了想重装Ubuntu系统时,重装失败,应该是引导项没删掉,这个在C盘。参考这个博客 删除EFI文件夹的Ubuntu文件夹。如果按照上一篇博客操作了一番,可以管理员模式运行进入cmd,然后
1.运行Chkdsk X:/f,其中X为需修复的硬盘盘符。
2.如果是硬盘的某部分文件损坏,则右键属性该硬盘,依次工具、差错、自动修复文件系统错误、扫描并试图回复坏扇区、开始。
然后就可以删掉Ubuntu文件夹进行重装Ubuntu系统了。
记录踩坑过程,防止下次踩坑!!!

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









