







一 数据处理(后续补充)
二 模型结构
2.1 Backbone+Neck
- 这里输入不加时序的单帧图片,一共六张,输入图片大小为 B ∗ 6 ∗ 3 ∗ 480 ∗ 800 ( B 是 b a t c h s i z e ) B*6*3*480*800 (B是batchsize) B∗6∗3∗480∗800(B是batchsize),先走grid_mask数据增强(参考https://blog.youkuaiyun.com/u013685264/article/details/122667456),采用基础resnet50作为backbone,得到最后32倍下采样特征 B ∗ 6 ∗ 2048 ∗ 15 ∗ 25 B*6*2048*15*25 B∗6∗2048∗15∗25,在经过neck(主要是两个Conv2d 进行降维),得到输出 B ∗ 6 ∗ 256 ∗ 15 ∗ 25 B*6*256*15*25 B∗6∗256∗15∗25
2.2 BEV特征
- 目前bev特征生成,主流的主要是bevformer和LSS,针对这两种方式,后续补充,生成bev特征 B ∗ 2000 ∗ 256 ( 2000 是对应 200 ∗ 100 B E V 空间大小( h ∗ w )) B*2000*256(2000是对应200*100 BEV空间大小(h*w)) B∗2000∗256(2000是对应200∗100BEV空间大小(h∗w)),LSS还会生成对应depth特征 B ∗ 6 ∗ 68 ∗ 15 ∗ 25 B*6*68*15*25 B∗6∗68∗15∗25 用作后续深度监督
2.2.1 LSS(基于BEVDepth)
- 目前LSS方法,是针对所有2D图像,生成空间特征和对应的离散深度分布概率,通过内积,得到最终的视锥特征和对应的空间位置,然后根据内外参,将点投射到bev空间上,采用求和池化的方式,得到相应的bev特征(参考https://zhuanlan.zhihu.com/p/567880155)
2.2.1.1 以基于BEVDepth的LSS模块代码为例
- 输入图像特征 B ∗ 6 ∗ 256 ∗ 15 ∗ 25 B*6*256*15*25 B∗6∗256∗15∗25,以及对应的转换矩阵,包括图像增强经过转换后的平移和旋转参数(post_trans,post_rots),相机内参和外参(cam2ego_trans,cam2ego_rots),lidar2ego_trans,lidar2ego_rots
- 第一步生成带深度的空间点位置,以原输入IH=480,IW=800,深度取值范围是1m~35m,以0.5m为间隔,得到最终空间坐标frustum(shape大小 68 ∗ 15 ∗ 25 ∗ 3 ,以 32 为步长进行插值采样 68*15*25*3, 以32为步长进行插值采样 68∗15∗25∗3,以32为步长进行插值采样),在图像坐标系下,然后经过以上输入的转换矩阵和扩展,得到bev空间下points(shape大小 B ∗ 6 ∗ 68 ∗ 15 ∗ 25 ∗ 3 B*6*68*15*25*3 B∗6∗68∗15∗25∗3)
- 这里在估算深度的时候,和相机内参相关,这里将相机内参,外参以及图像增强的转换矩阵,当成输入参数,生成mlp_input(shape大小 B ∗ 6 ∗ 22 B*6*22 B∗6∗22),先经过bn层,在经过fc+relu+fc+relu生成context_se(shape大小 B ∗ 6 ∗ 256 B*6*256 B∗6∗256),与下面的图像特征做通道注意力(采用SENet通道注意力)
- 对于输入的图像特征,经过一次conv+bn+relu,与经过sigmoid之后的context_se进行相乘,得到经过相机参数加成之后的空间语义特征context B ∗ 6 ∗ 256 ∗ 15 ∗ 25 B*6*256*15*25 B∗6∗256∗15∗25
- 对于depth生成,第一步也是类似上一步,对于通过图像特征生成的depth也要经过相机参数加成,得到进入depth_conv的输入 B ∗ 6 ∗ 256 ∗ 15 ∗ 25 B*6*256*15*25 B∗6∗256∗15∗25
- 基于上一步生成的depth走一个ASPP模块,在加一个conv得到深度分布特征 B ∗ 6 ∗ 68 ∗ 15 ∗ 25 B*6*68*15*25 B∗6∗68∗15∗25,并通过softmax,得到最终depth B ∗ 6 ∗ 68 ∗ 15 ∗ 25 B*6*68*15*25 B∗6∗68∗15∗25,用于后续loss计算
- 将depth与context相乘得到最终的空间特征 B ∗ 6 ∗ 68 ∗ 15 ∗ 25 ∗ 256 B*6*68*15*25*256 B∗6∗68∗15∗25∗256,根据bev空间下points,然后因为实际的point_cloud_range是[-15.0, -30.0,-10.0, 15.0, 30.0, 10.0],第一步的bev空间特征大小是200*400,所以将points坐标减去[-15.0, -30.0,-10.0],在除以voxel_size = [0.15, 0.15, 20.0],进行坐标转换,选取点坐标在[0,0,0,200,400,1]之间的进行保存,之后采用quickCumsum,进行特征合并,就是相同x,y坐标点的特征进行求和,得到bev特征 B ∗ 256 ∗ 200 ∗ 400 B*256*200*400 B∗256∗200∗400,之后在走3次conv+bn+relu,进行下采样得到最终BEV特征 B ∗ 256 ∗ 200 ∗ 400 B*256*200*400 B∗256∗200∗400
2.2.1.2 Depth的loss计算
- 基于上一步预测的depth,经过softmax之后,特征大小是 B ∗ 6 ∗ 68 ∗ 15 ∗ 25 B*6*68*15*25 B∗6∗68∗15∗25
- 生成depth真值,先加载对应的点云,然后通过转换矩阵,转换到图像坐标系下,生成3维坐标,保留在图像大小范围内,和深度1~35m范围内的点,对应同一个坐标点,多个深度值,选取深度最小的,生成depth_map B ∗ 6 ∗ 480 ∗ 800 B*6*480*800 B∗6∗480∗800,之后进行下采样32倍,就是取这个32*32范围内,深度最小的当成下采样之后该坐标点的深度值,然后扩展到68(1~35m,间隔0.5m取值一共68)的范围,最后做one-hot,得到最终的gt depth,与上面的输入进行binary_cross_entropy
2.2.2 BevFormer
-bevformer是通过transformer模块,生成对应bev特征,具体可以参考https://zhuanlan.zhihu.com/p/543335939
2.2.2.1 代码示例
- 输入mlvl_feats(包含一层的图像特征 B ∗ 6 ∗ 256 ∗ 15 ∗ 25 B*6*256*15*25 B∗6∗256∗15∗25, 以及生成对应的bev_query( 20000 ∗ B ∗ 256 20000*B*256 20000∗B∗256), bev_pos( 20000 ∗ B ∗ 256 20000*B*256 20000∗B∗256)
- 对应的can_bus这些参数,经过Linear+relu+Linear+relu+LayerNorm,生成对应特征与bev_query相加得到bev_queries( 20000 ∗ B ∗ 256 20000*B*256 20000∗B∗256)
- 对于mlvl_feats 加上对应的cams_embeds和level_embeds,得到feat_flatten( 6 ∗ 375 ∗ B ∗ 256 6*375*B*256 6∗375∗B∗256),spatial_shapes( 15 ∗ 25 15*25 15∗25)
- 生成ref_3d,就是在H,W,Z(100,200,20)范围内生成对应归一化的点,其中在Z方向上均匀采样4个点( B ∗ 4 ∗ 20000 ∗ 3 B*4*20000*3 B∗4∗20000∗3)
- 生成ref_2d,就是在H,W上生成对应归一化的点,和上面的ref_3d就是少了Z方向( B ∗ 20000 ∗ 1 ∗ 2 B*20000*1*2 B∗20000∗1∗2)
- 通过ref_3d,通过变换,投影到图像坐标系下面,保留在相机坐标系下深度大于0的点以及,在图像范围内的点,得到reference_points_cam( 6 ∗ B ∗ 20000 ∗ 4 ∗ 2 6*B*20000*4*2 6∗B∗20000∗4∗2), bev_mask( 6 ∗ B ∗ 20000 ∗ 4 6*B*20000*4 6∗B∗20000∗4)
- 对于bevformer是有时序模块,maptrv2没有加入时序,所以prev_bev为None,生成对应的hybird_ref_2d,就是两个ref_2d进行stack( B ∗ 2 ∗ 20000 ∗ 1 ∗ 2 B*2*20000*1*2 B∗2∗20000∗1∗2)
- 最终进入layer的输入,包括bev_query,key和value为feat_flatten,ref_2d为hybird_ref_2d,ref_3d,bev_pos,reference_points_cam
2.2.2.2 Layer模块
ret_dict = self.encoder(
bev_queries,
feat_flatten,
feat_flatten,
mlvl_feats=mlvl_feats,
bev_h=bev_h,
bev_w=bev_w,
bev_pos=bev_pos,
spatial_shapes=spatial_shapes,
level_start_index=level_start_index,
prev_bev=prev_bev,
shift=shift,
**kwargs
)
- 包括self-attention,layernorm,cross_attention,layernorm,ffn,layernorm
- self-attention就是Temporal Self-Attention,这里没有prev_bev,所以将2个bev_query,stack一下,得到query( B ∗ 2 ∗ 20000 ∗ 256 B*2*20000*256 B∗2∗20000∗256),value同样的大小,然后经过deformable-attention(详细计算流程可参考下面decoder,计算过程类似),然后将2个进行平均得到最终输出query( B ∗ ∗ 20000 ∗ 256 B**20000*256 B∗∗20000∗256)
- cross-attention就是Spatial Cross-Attention,这里query是上面的query,key和value对应输入的feat_flatten,其中因为bev空间下的点,在投射到图像坐标系上,只有少量的点,所以做了一步优化,就是根据bev_mask,选取投影到的点,根据多batch设置,就选多个batch里面的最大值作为max_len,不够的batch相应的query和reference_point都设为0,得到queries_rebatch( B ∗ 6 ∗ m a x l e n ∗ 256 B*6*max_len*256 B∗6∗maxlen∗256),reference_points_rebatch( B ∗ 6 ∗ m a x l e n ∗ 4 ∗ 2 B*6*max_len*4*2 B∗6∗maxlen∗4∗2),经过deformable-attention,得到queries( B ∗ 6 ∗ m a x l e n ∗ 256 B*6*max_len*256 B∗6∗maxlen∗256),最后在还原到原始20000大小的query上(非图像上点的query为0),然后对6个摄像头点数求和,归一化,得到最终query( B ∗ 20000 ∗ 256 B*20000*256 B∗20000∗256)
- 经过6层layer之后的query就是最终的bev_features( B ∗ 20000 ∗ 256 B*20000*256 B∗20000∗256)
2.3 Decoder模块
- 输入query,采用instance_pts形式,即instance(instance一共有350个,主要是50+300,50是one2one,300是后续one2many多扩展的6倍)和每个instance对应的20个点,分开初始化,最终得到object_query_embeds 7000 ∗ 512 (其中 7000 是对应 350 ∗ 20 , 512 是对应 q u e r y 和 q u e r y − p o s 合到一起的,也就是 q u e r y 和 q u e r y − p o s 特征是 350 ∗ 20 ∗ 256 ) 7000*512(其中7000是对应350*20,512是对应query和query-pos合到一起的,也就是query和query-pos特征是350*20*256) 7000∗512(其中7000是对应350∗20,512是对应query和query−pos合到一起的,也就是query和query−pos特征是350∗20∗256)
- 这里设置了个self_attn_mask,大小是 350 ∗ 350 350*350 350∗350,就是左上角的 50 ∗ 50 50*50 50∗50和右下角的 300 ∗ 300 300*300 300∗300是False,是为了隔开one2one和one2many的query,互相不干扰
2.3.1 decoder过程,主要参考deformable attention
MapTRDecoder(
(layers): ModuleList(
(0): DecoupledDetrTransformerDecoderLayer(
(attentions): ModuleList(
(0): MultiheadAttention(
(attn): MultiheadAttention(
(out_proj): NonDynamicallyQuantizableLinear(in_features=256, out_features=256, bias=True)
)
(proj_drop): Dropout(p=0.0, inplace=False)
(dropout_layer): Dropout(p=0.1, inplace=False)
)
(1): MultiheadAttention(
(attn): MultiheadAttention(
(out_proj): NonDynamicallyQuantizableLinear(in_features=256, out_features=256, bias=True)
)
(proj_drop): Dropout(p=0.0, inplace=False)
(dropout_layer): Dropout(p=0.1, inplace=False)
)
(2): CustomMSDeformableAttention(
(dropout): Dropout(p=0.1, inplace=False)
(sampling_offsets): Linear(in_features=256, out_features=64, bias=True)
(attention_weights): Linear(in_features=256, out_features=32, bias=True)
(value_proj): Linear(in_features=256, out_features=256, bias=True)
(output_proj): Linear(in_features=256, out_features=256, bias=True)
)
)
(ffns): ModuleList(
(0): FFN(
(activate): ReLU(inplace=True)
(layers): Sequential(
(0): Sequential(
(0): Linear(in_features=256, out_features=512, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.1, inplace=False)
)
(1): Linear(in_features=512, out_features=256, bias=True)
(2): Dropout(p=0.1, inplace=False)
)
(dropout_layer): Identity()
)
)
(norms): ModuleList(
(0): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
(1): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
(2): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
(3): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
)
)
(1): DecoupledDetrTransformerDecoderLayer(
(attentions): ModuleList(
(0): MultiheadAttention(
(attn): MultiheadAttention(
(out_proj): NonDynamicallyQuantizableLinear(in_features=256, out_features=256, bias=True)
)
(proj_drop): Dropout(p=0.0, inplace=False)
(dropout_layer): Dropout(p=0.1, inplace=False)
)
(1): MultiheadAttention(
(attn): MultiheadAttention(
(out_proj): NonDynamicallyQuantizableLinear(in_features=256, out_features=256, bias=True)
)
(proj_drop): Dropout(p=0.0, inplace=False)
(dropout_layer): Dropout(p=0.1, inplace=False)
)
(2): CustomMSDeformableAttention(
(dropout): Dropout(p=0.1, inplace=False)
(sampling_offsets): Linear(in_features=256, out_features=64, bias=True)
(attention_weights): Linear(in_features=256, out_features=32, bias=True)
(value_proj): Linear(in_features=256, out_features=256, bias=True)
(output_proj): Linear(in_features=256, out_features=256, bias=True)
)
)
(ffns): ModuleList(
(0): FFN(
(activate): ReLU(inplace=True)
(layers): Sequential(
(0): Sequential(
(0): Linear(in_features=256, out_features=512, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.1, inplace=False)
)
(1): Linear(in_features=512, out_features=256, bias=True)
(2): Dropout(p=0.1, inplace=False)
)
(dropout_layer): Identity()
)
)
(norms): ModuleList(
(0): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
(1): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
(2): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
(3): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
)
)
(2): DecoupledDetrTransformerDecoderLayer(
(attentions): ModuleList(
(0): MultiheadAttention(
(attn): MultiheadAttention(
(out_proj): NonDynamicallyQuantizableLinear(in_features=256, out_features=256, bias=True)
)
(proj_drop): Dropout(p=0.0, inplace=False)
(dropout_layer): Dropout(p=0.1, inplace=False)
)
(1): MultiheadAttention(
(attn): MultiheadAttention(
(out_proj): NonDynamicallyQuantizableLinear(in_features=256, out_features=256, bias=True)
)
(proj_drop): Dropout(p=0.0, inplace=False)
(dropout_layer): Dropout(p=0.1, inplace=False)
)
(2): CustomMSDeformableAttention(
(dropout): Dropout(p=0.1, inplace=False)
(sampling_offsets): Linear(in_features=256, out_features=64, bias=True)
(attention_weights): Linear(in_features=256, out_features=32, bias=True)
(value_proj): Linear(in_features=256, out_features=256, bias=True)
(output_proj): Linear(in_features=256, out_features=256, bias=True)
)
)
(ffns): ModuleList(
(0): FFN(
(activate): ReLU(inplace=True)
(layers): Sequential(
(0): Sequential(
(0): Linear(in_features=256, out_features=512, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.1, inplace=False)
)
(1): Linear(in_features=512, out_features=256, bias=True)
(2): Dropout(p=0.1, inplace=False)
)
(dropout_layer): Identity()
)
)
(norms): ModuleList(
(0): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
(1): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
(2): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
(3): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
)
)
(3): DecoupledDetrTransformerDecoderLayer(
(attentions): ModuleList(
(0): MultiheadAttention(
(attn): MultiheadAttention(
(out_proj): NonDynamicallyQuantizableLinear(in_features=256, out_features=256, bias=True)
)
(proj_drop): Dropout(p=0.0, inplace=False)
(dropout_layer): Dropout(p=0.1, inplace=False)
)
(1): MultiheadAttention(
(attn): MultiheadAttention(
(out_proj): NonDynamicallyQuantizableLinear(in_features=256, out_features=256, bias=True)
)
(proj_drop): Dropout(p=0.0, inplace=False)
(dropout_layer): Dropout(p=0.1, inplace=False)
)
(2): CustomMSDeformableAttention(
(dropout): Dropout(p=0.1, inplace=False)
(sampling_offsets): Linear(in_features=256, out_features=64, bias=True)
(attention_weights): Linear(in_features=256, out_features=32, bias=True)
(value_proj): Linear(in_features=256, out_features=256, bias=True)
(output_proj): Linear(in_features=256, out_features=256, bias=True)
)
)
(ffns): ModuleList(
(0): FFN(
(activate): ReLU(inplace=True)
(layers): Sequential(
(0): Sequential(
(0): Linear(in_features=256, out_features=512, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.1, inplace=False)
)
(1): Linear(in_features=512, out_features=256, bias=True)
(2): Dropout(p=0.1, inplace=False)
)
(dropout_layer): Identity()
)
)
(norms): ModuleList(
(0): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
(1): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
(2): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
(3): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
)
)
(4): DecoupledDetrTransformerDecoderLayer(
(attentions): ModuleList(
(0): MultiheadAttention(
(attn): MultiheadAttention(
(out_proj): NonDynamicallyQuantizableLinear(in_features=256, out_features=256, bias=True)
)
(proj_drop): Dropout(p=0.0, inplace=False)
(dropout_layer): Dropout(p=0.1, inplace=False)
)
(1): MultiheadAttention(
(attn): MultiheadAttention(
(out_proj): NonDynamicallyQuantizableLinear(in_features=256, out_features=256, bias=True)
)
(proj_drop): Dropout(p=0.0, inplace=False)
(dropout_layer): Dropout(p=0.1, inplace=False)
)
(2): CustomMSDeformableAttention(
(dropout): Dropout(p=0.1, inplace=False)
(sampling_offsets): Linear(in_features=256, out_features=64, bias=True)
(attention_weights): Linear(in_features=256, out_features=32, bias=True)
(value_proj): Linear(in_features=256, out_features=256, bias=True)
(output_proj): Linear(in_features=256, out_features=256, bias=True)
)
)
(ffns): ModuleList(
(0): FFN(
(activate): ReLU(inplace=True)
(layers): Sequential(
(0): Sequential(
(0): Linear(in_features=256, out_features=512, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.1, inplace=False)
)
(1): Linear(in_features=512, out_features=256, bias=True)
(2): Dropout(p=0.1, inplace=False)
)
(dropout_layer): Identity()
)
)
(norms): ModuleList(
(0): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
(1): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
(2): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
(3): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
)
)
(5): DecoupledDetrTransformerDecoderLayer(
(attentions): ModuleList(
(0): MultiheadAttention(
(attn): MultiheadAttention(
(out_proj): NonDynamicallyQuantizableLinear(in_features=256, out_features=256, bias=True)
)
(proj_drop): Dropout(p=0.0, inplace=False)
(dropout_layer): Dropout(p=0.1, inplace=False)
)
(1): MultiheadAttention(
(attn): MultiheadAttention(
(out_proj): NonDynamicallyQuantizableLinear(in_features=256, out_features=256, bias=True)
)
(proj_drop): Dropout(p=0.0, inplace=False)
(dropout_layer): Dropout(p=0.1, inplace=False)
)
(2): CustomMSDeformableAttention(
(dropout): Dropout(p=0.1, inplace=False)
(sampling_offsets): Linear(in_features=256, out_features=64, bias=True)
(attention_weights): Linear(in_features=256, out_features=32, bias=True)
(value_proj): Linear(in_features=256, out_features=256, bias=True)
(output_proj): Linear(in_features=256, out_features=256, bias=True)
)
)
(ffns): ModuleList(
(0): FFN(
(activate): ReLU(inplace=True)
(layers): Sequential(
(0): Sequential(
(0): Linear(in_features=256, out_features=512, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.1, inplace=False)
)
(1): Linear(in_features=512, out_features=256, bias=True)
(2): Dropout(p=0.1, inplace=False)
)
(dropout_layer): Identity()
)
)
(norms): ModuleList(
(0): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
(1): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
(2): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
(3): LayerNorm((256,), eps=1e-05, elementwise_affine=True)
)
)
)
)
- 根据query_pos 走一个线性变化,得到reference_points B ∗ 7000 ∗ 2 B*7000*2 B∗7000∗2,然后走sigmoid,得到初始化init_reference_out B ∗ 7000 ∗ 2 B*7000*2 B∗7000∗2
- 输入的img_neck特征,加上cams_embeds 和 level_embeds,得到feat_flatten 6 ∗ 375 ∗ B ∗ 256 ( 375 是 15 ∗ 25 ) 6*375*B*256 (375是15*25) 6∗375∗B∗256(375是15∗25)
- 进入decoder过程
- 这里经过6层decoder,每一层有self-attention,layer_norm,self-attention,layer_norm,cross-attention,layer_norm,FFN,layer_norm
- 第一次self-attention是nn.MultiheadAttention,输入是query和query_pos,这里就用到了前面的 self_attn_mask,在nn.MultiheadAttention模块中,mask=1-attn_mask,对应上面的设置
- 第二次self-attention,其中attn_mask设置为None
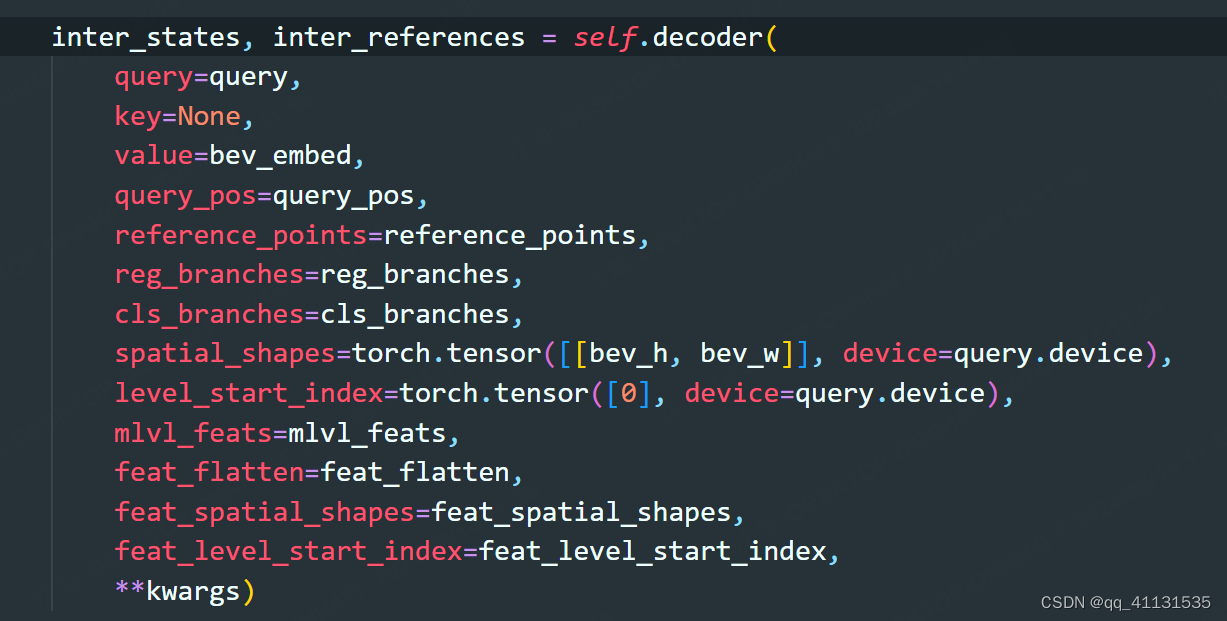
- cross-attention,采用CustomMSDeformableAttention,输入query,key=None,value是对应的bev_embed;value经过一个Linear,得到最终输入value,query经过Linear生成多头的sampling_offsets B ∗ 7000 ∗ 8 ∗ 1 ∗ 4 ∗ 2 ( 7000 表示是 350 ∗ 20 个实例, 8 是 m u l t i − h e a d , 1 是只有一个 l e v e l , 4 是生成 4 个点, 2 是对应的 x y 偏移) B*7000*8*1*4*2(7000表示是350*20个实例,8是multi-head,1是只有一个level,4是生成4个点,2是对应的xy偏移) B∗7000∗8∗1∗4∗2(7000表示是350∗20个实例,8是multi−head,1是只有一个level,4是生成4个点,2是对应的xy偏移);query经过Linear生成多头的attention_weights B ∗ 7000 ∗ 8 ∗ 1 ∗ 4 ( 7000 表示是 350 ∗ 20 个实例, 8 是 m u l t i − h e a d , 1 是只有一个 l e v e l , 4 是生成 4 个点) B*7000*8*1*4(7000表示是350*20个实例,8是multi-head,1是只有一个level,4是生成4个点) B∗7000∗8∗1∗4(7000表示是350∗20个实例,8是multi−head,1是只有一个level,4是生成4个点),在经过softmax;通过reference_points+sampling_offsets/shape,得到最终的sampling_locations,整个过程就是通过reference_ponits,加上4个offsets,得到最终4个点的位置,然后在value上面进行双线性插值得到特征,然后在乘以attention_weights,在求和得到最终output B ∗ 7000 ∗ 256 B*7000*256 B∗7000∗256,在经过Linear以及和输入的query做残差连接,得到最终cross-attention输出 7000 ∗ B ∗ 256 7000*B*256 7000∗B∗256
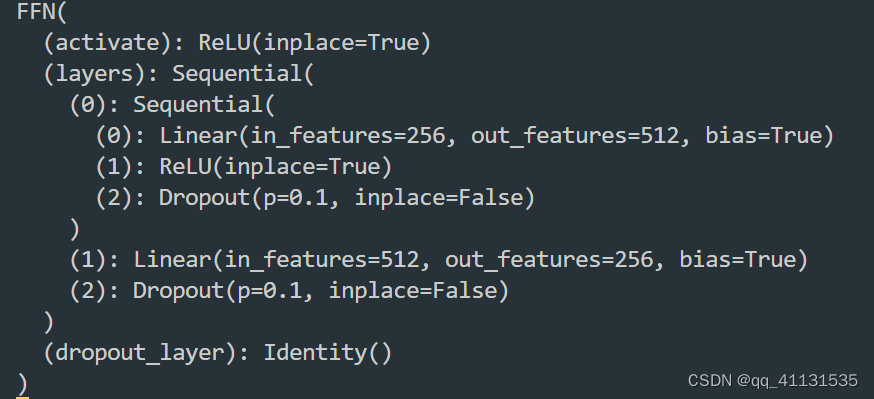
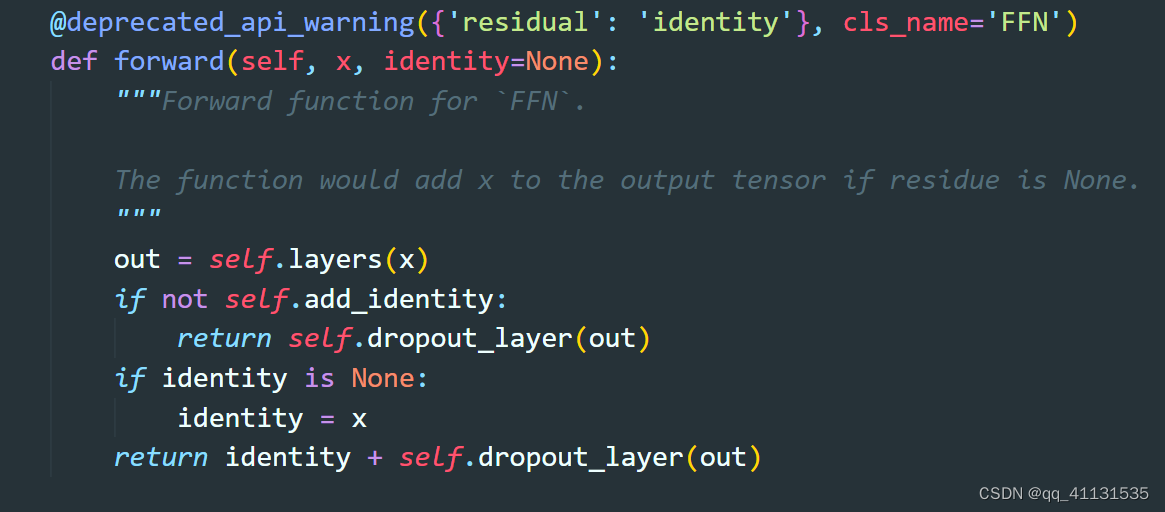
- FFN,主要参考如下
- 得到最终output B ∗ 7000 ∗ 256 B*7000*256 B∗7000∗256,当成下一层的query输入,output经过reg_branches(Linear+Relu+Linear+Relu+Linear),得到新参考点的偏移,之后与初始输入的reference_points(经过逆sigmoid)相加之后得到new_reference_points,并经过sigmoid当成下一层的inference_points的输入
- 最终经过6层之后,保留每一层的输出output和inference_points,后面计算损失
- 对于每一层输出的output B ∗ 7000 ∗ 256 B*7000*256 B∗7000∗256,转换成 B ∗ 350 ∗ 20 ∗ 256 B*350*20*256 B∗350∗20∗256,并对第三维求平均,得到 B ∗ 350 ∗ 256 B*350*256 B∗350∗256经过cls_branches (Linear+LayerNorm+Relu+Linear+LayerNorm+Relu+Linear),得到最终分类结果 B ∗ 350 ∗ 3 B*350*3 B∗350∗3,一共只有3类;代码中会重新生成reference_points与上面生成reference_points相同,代码里面属于重复生成了,可以删除,最终得到点的坐标 B ∗ 7000 ∗ 2 (也就是 B ∗ 350 ∗ 20 ∗ 2 ,一共 350 个 i n s t a n c e ,一个 i n s t a n c e 对应 20 个点坐标) B*7000*2(也就是B*350*20*2,一共350个instance,一个instance对应20个点坐标) B∗7000∗2(也就是B∗350∗20∗2,一共350个instance,一个instance对应20个点坐标),然后生成对应的外接矩形框和对应的20个点坐标
- 这里采用辅助分割,第一个根据bev_embed,通过seg_head (Conv2d+Relu+Conv2d),得到在bev下的语义分割结果 B ∗ 1 ∗ 200 ∗ 100 B*1*200*100 B∗1∗200∗100;第二个根据img_neck B ∗ 6 ∗ 256 ∗ 15 ∗ 25 B*6*256*15*25 B∗6∗256∗15∗25,通过pv_seg_head (Conv2d+Relu+Conv2d),得到原始6张pv图下的语义分割结果 B ∗ 6 ∗ 1 ∗ 15 ∗ 25 B*6*1*15*25 B∗6∗1∗15∗25
2.4 Loss计算
- depth loss ,基于LSS计算的,后续补充
- 对于输出一共350个instance,这里分成50个one2one,和300个one2many,对应one2many的gt_label也是相应复制6份
2.4.1 进行maptr_assigner
- 这里以one2one计算为例,对于gt处理,目前一共三类,是车道线,边界线和人行横道,对于前面两类会增加正序和逆序,对于人行横道是环形,这里就是循环生成19个实例,对于前面两类不足19个就补-1,最终得到gt_shifts_pts_list N ∗ 19 ∗ 20 ∗ 2 ( N 表示一个输入里面包括 N 个 g t ) N*19*20*2 (N表示一个输入里面包括N个gt) N∗19∗20∗2(N表示一个输入里面包括N个gt)
- 计算loss,包括cls_loss (focal_loss),box_reg_los (L1 loss),pts_loss(L1 loss),iou_loss(giou loss),但是基于box的box_reg_los和iou_loss的weight都设置为0
- 这里对于pts_loss,计算不同的是,会计算这50个实例和这19个新增的gt的loss,然后在这19个选择最小的一个作为最终loss计算
- 流程就是计算所有loss,根据匈牙利匹配,选取1对1的gt和pred,然后计算最终loss
2.4.2 进行最终loss
- 最终loss ,包括cls_loss (focal_loss),box_reg_los (L1 loss),pts_loss(L1 loss),iou_loss(giou loss),dir_loss(是一个方向loss,采用nn.CosineEmbeddingLoss),但是基于box的box_reg_los和iou_loss的weight都设置为0
- 其他loss和上面类似,主要是dir_loss,这里是一共20个点(实际数值,不是归一化之后的数值),然后后面一个点减去前面一个点,得到插值,结果是 N ∗ 50 ∗ 19 ( N 表示一个输入里面包括 N 个 g t ) N*50*19 (N表示一个输入里面包括N个gt) N∗50∗19(N表示一个输入里面包括N个gt),然后与gt计算余弦相似度 loss

















 1552
1552

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









