




 本文探讨了使用稀疏表示进行人脸识别与恢复的技术,重点介绍了正交匹配追踪(OMP)算法、奇异值分解(SVD)及K-SVD算法在人脸数据集上的应用。通过将图像划分为小块并构建字典,实验展示了如何使用OMP算法实现人脸像素的缺失处理与图像重建,并计算了重建图像的平均误差。
本文探讨了使用稀疏表示进行人脸识别与恢复的技术,重点介绍了正交匹配追踪(OMP)算法、奇异值分解(SVD)及K-SVD算法在人脸数据集上的应用。通过将图像划分为小块并构建字典,实验展示了如何使用OMP算法实现人脸像素的缺失处理与图像重建,并计算了重建图像的平均误差。
Face Recovery Using Sparse Representation
paper dist: https://ieeexplore.ieee.org/document/4483511
some picture of the blog is taken from teacher’s powerpoint
Prepared Algorithm
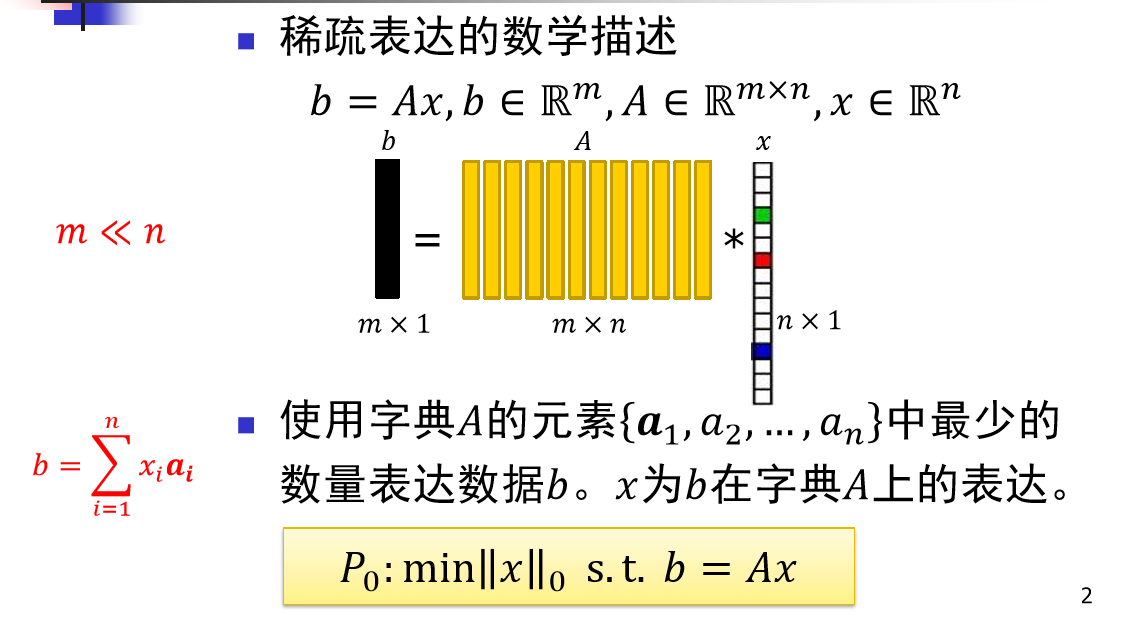
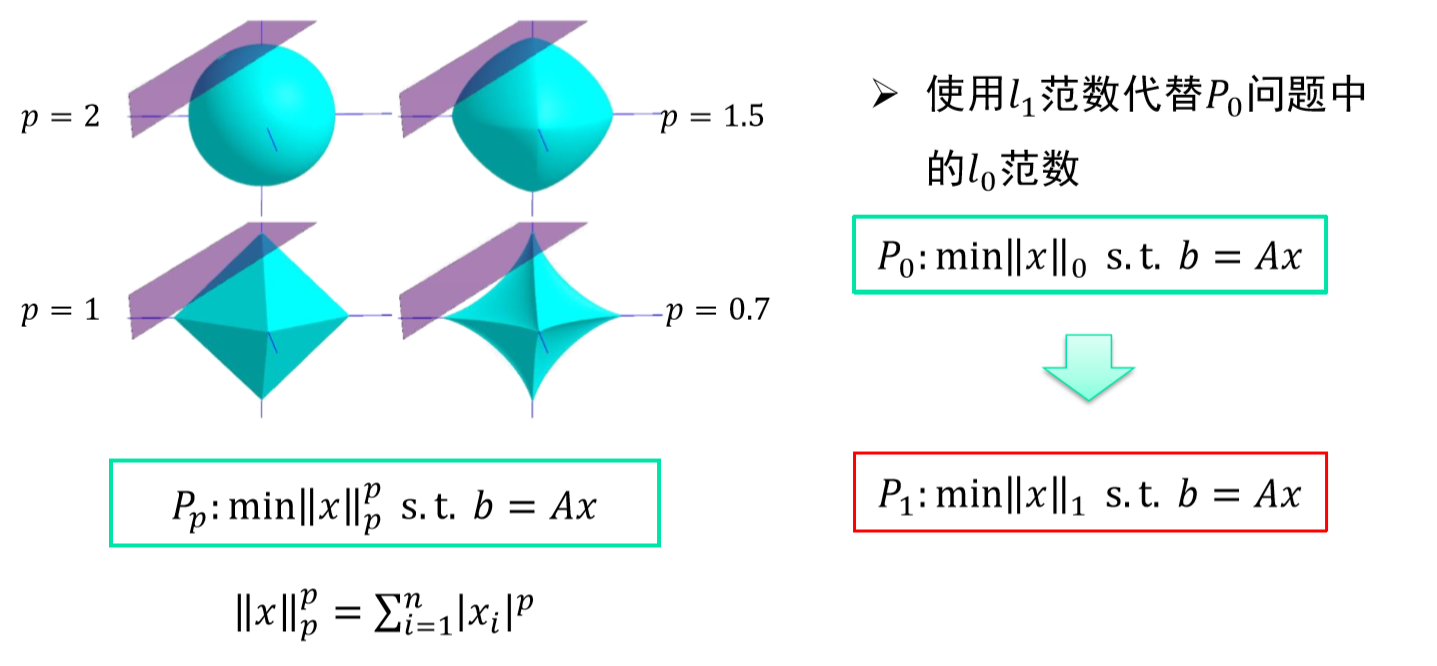
范数
OMP(正交匹配跟踪算法)
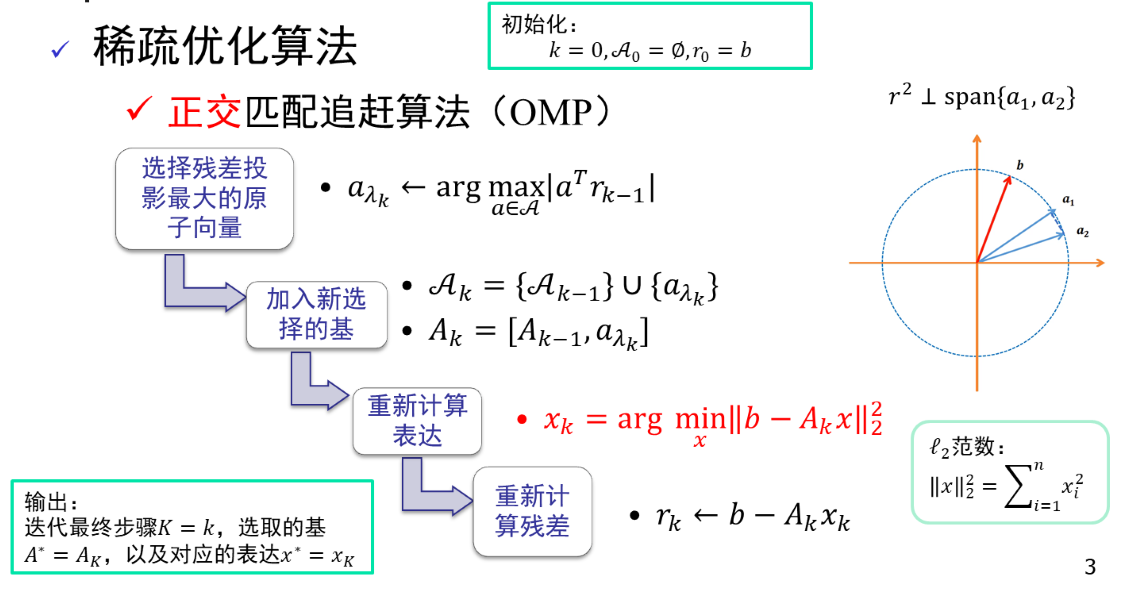
you can use these blog to learn the main content of the omp(Orthogonal Matching Pursuit) algorithm.
https://zhuanlan.zhihu.com/p/52276805
https://blog.youkuaiyun.com/theonegis/article/details/78230737
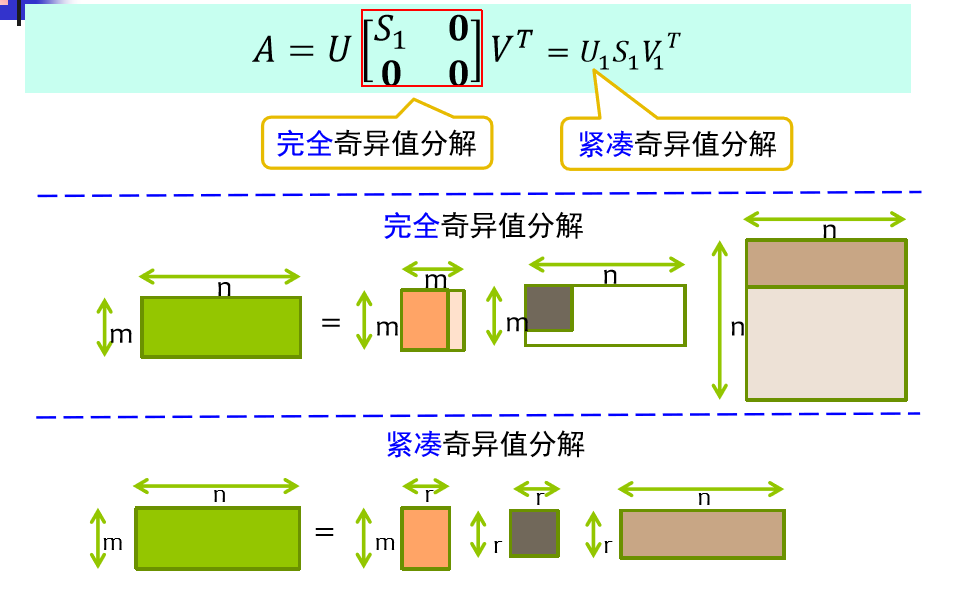
SVD(奇异值分解)
you can use these blog to learn the main content of the omp(Orthogonal Matching Pursuit) algorithm.
https://www.cnblogs.com/LeftNotEasy/archive/2011/01/19/svd-and-applications.html
https://www.cnblogs.com/endlesscoding/p/10058532.html
K-SVD
https://zhuanlan.zhihu.com/p/45964374
https://blog.youkuaiyun.com/zhangyake1989/article/details/78366040
https://blog.youkuaiyun.com/theonegis/article/details/78453909
Experiment
本实验具体步骤如下:
- 将数据集划分为训练集和测试集:
数据集为取37张图片每张图片按8x8的小块划分,将每块reshape为64x1的向量。随机取11000块初始化为数据集(即为64x11000);取最后一张图像为测试集,同样按8x8的小块划分并置为行数为64的矩阵。
class Divide:
def __init__(self, b_w, b_h):
'''
b_w: block width
b_h: block height
'''
self.block_width = b_w
self.block_height = b_h
def encode(self, mat):
(W, H) = mat.shape
# (192, 168)->(24,21)
w_len = int(W / self.block_width)
h_len = int(H / self.block_height)
res = np.zeros((self.block_width * self.block_height, w_len * h_len))
for i in range(h_len):
for j in range(w_len):
temp = mat[j * self.block_width:(j + 1) * self.block_width,
i * self.block_height:(i + 1) * self.block_height]
temp = temp.reshape(self.block_width * self.block_height)
res[:, i * w_len + j] = temp
return res
def decode(self, mat, W, H):
'''
mat.shape should be ( block_width*block_height, ~ = 24*21 )
'''
w_len = int(W / self.block_width)
h_len = int(H / self.block_height)
mat = mat.reshape(self.block_width * self.block_height, w_len * h_len)
res = np.zeros((W, H))
for i in range(h_len):
for j in range(w_len):
temp = mat[:, i * w_len + j]
temp = temp.reshape(self.block_width, self.block_height)
res[j * self.block_width:(j + 1) * self.block_width,
i * self.block_height:(i + 1) * self.block_height] = temp
return res
- 在训练集上使用 K S V D KSVD KSVD算法处理字典。字典大小设计为64x441。
- 对测试集中的人脸像素进行缺失处理(对于图像中每个8x8的小块取部分像素置为0)。
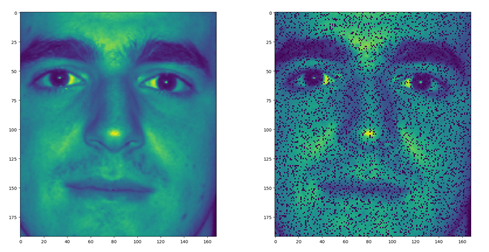
- 在测试集上使用omp算法得到稀疏表达(对于每一列(8x8, 1)的矩阵去除缺失处理过的像素位置,字典同样处理在用omp算法处理),然后使用字典重建图像。
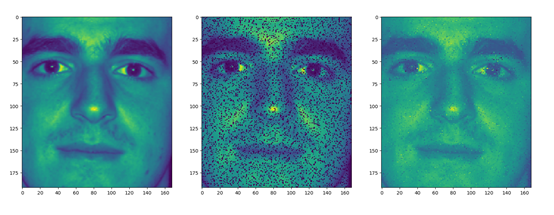
- 计算重建图像与原始图像的平均误差。
与原图像误差:[test_result]: 44.216990942568934
与缺失处理图像误差:[missed_img]: 83.18243391931878
def test_result(B, eva_B):
'''
误差计算:
error_rate = sqrt(||B - ~B||_2_F / 64)
'''
return (np.linalg.norm(B - eva_B))**0.5
Part of Code
读入数据
def read_img():
'''
人脸数据集中选取的11000个8 × 8的图像 块(各个部位)
每一个8 × 8的图像块,是64 × 11000的矩阵𝑌中的一列
'''
src_img_w = 192
src_img_h = 168
# dataset = np.zeros((38,192,168), np.float)
dataset = np.zeros((src_img_w * src_img_h, 38), np.float)
cnt_num = 0
img_list = sorted(os.listdir(img_path))
os.chdir(img_path)
for img in img_list:
if img.endswith(".pgm"):
# print(img.size)
gray_img = cv2.imread(img, cv2.IMREAD_GRAYSCALE)
# 分块提取 8*8 的 block 汇成矩阵
# gray_img.reshape(src_img_w * src_img_h, 1)
divide = Divide(b_w=8, b_h=8)
gray_img = divide.encode(gray_img)
# gray_img = cv2.resize(gray_img, (src_img_w, src_img_h),interpolation=cv2.INTER_AREA)
dataset[:, cnt_num] = gray_img.reshape(src_img_w * src_img_h, )
cnt_num += 1
train_data = dataset.reshape(8 * 8, 24 * 21 * 38)
idx = random.sample(list(range(24 * 21 * (38 - 1))), select_train_num)
train_data = train_data[:, idx]
return train_data, dataset[:, -1]
update
def _update_dict(self, y, d, x):
"""
使用KSVD更新字典的过程
"""
for i in range(self.n_components):
# np.nonzero 得到矩阵非0元素位置
index = np.nonzero(x[i, :])[0]
if len(index) == 0:
continue
# 将第i列清空
d[:, i] = 0
# E := Y - D X = Y - Σ(l≠j) d_l X
r = (y - np.dot(d, x))[:, index]
# 矩阵的 奇异值 分解
u, s, v = np.linalg.svd(r, full_matrices=False)
d[:, i] = u[:, 0].T
x[i, index] = s[0] * v[0, :]
return d, x

















 1526
1526

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









