






直接开始吧
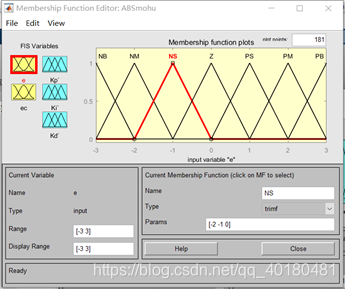
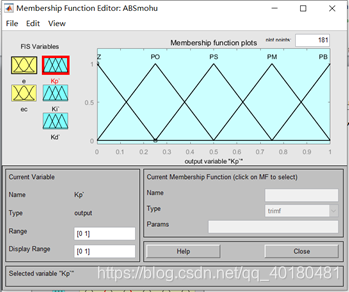
输入、输出隶属度函数:e、ec均为[-3,3],ki',kd',kp'均为[0,1],都采用三角形隶属度
模糊规则就百度一个相关的ABS论文,基本都有。
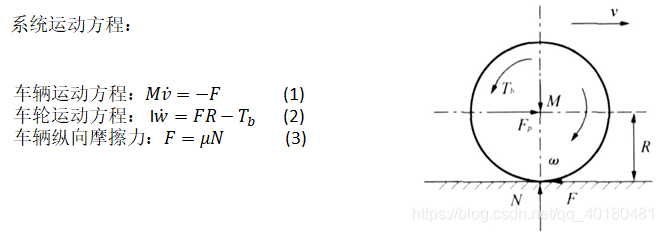
仿真图就是根据这三个公式搭建的。
来了,上图了::::::
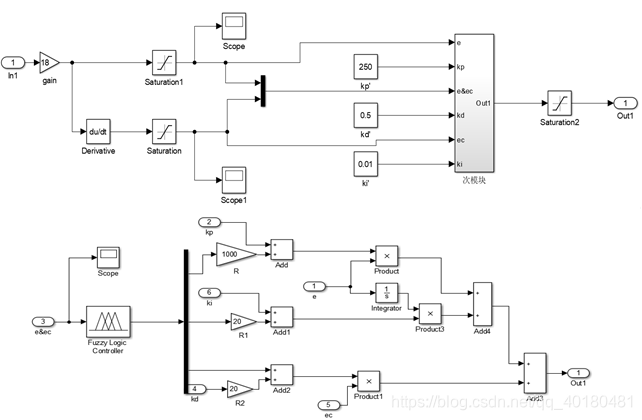
这是模糊PID和单纯PID对比图,大体差不多,就是控制器那块不一样。
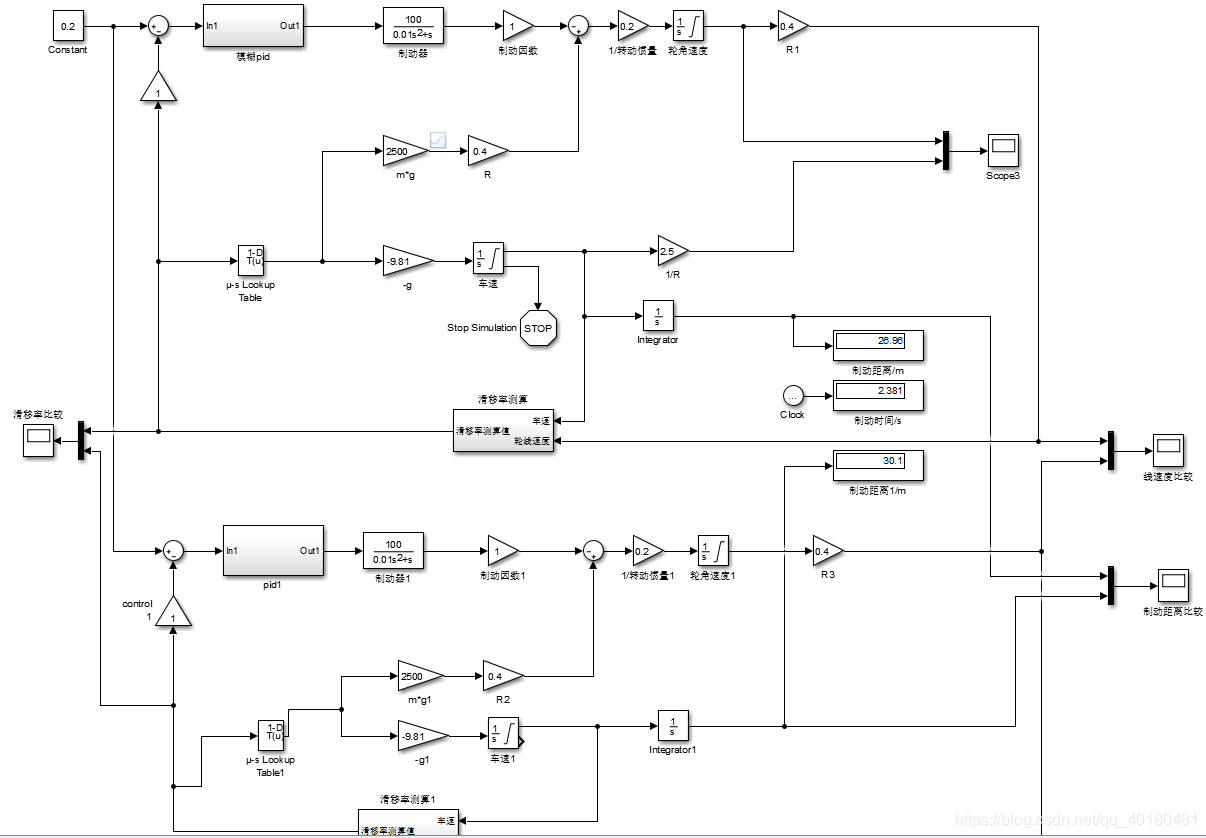
下边第一个图是模糊PID控制器内部设计,第二个图是第一个图中次模块的具体参数。这幅图中,限流器saturation上下限参数一定要改,不然仿真时系统一直报错,或者上下限都改大,都改为[-100000,100000]。
比较麻烦的是μ-s曲线模块,本来可以使用轮胎的魔术公式,但是该公式中四个参数一直找不到确定依据。所以只能用图线表,图线标的各坐标数据如下图:


其中mu指的是摩擦系数μ,slip就是滑移率。生成一个μ-s表格,便于系统查找输入的s所对应的μ数据。
至于怎么导入这两个数据,大家就百度一下吧,很容易。
slip=xlsread('数据表格的路径','A1:A21')
mu=xlsread......................同上
所有积分器初值:取初速度80km/h,若为角速度积分器,则角速度初始值为:80000/3600/0.4,也就是80迈转换为角初速度,若是车速,则为80000/3600,这些积分器上限都设置为1000
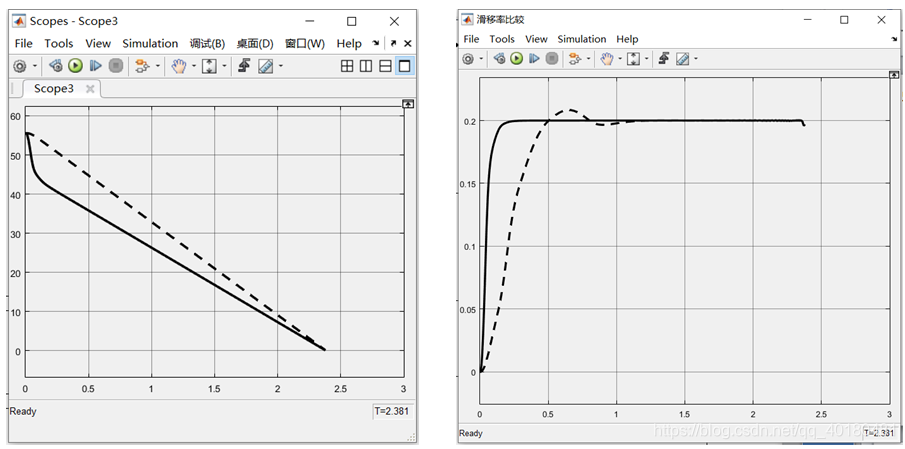
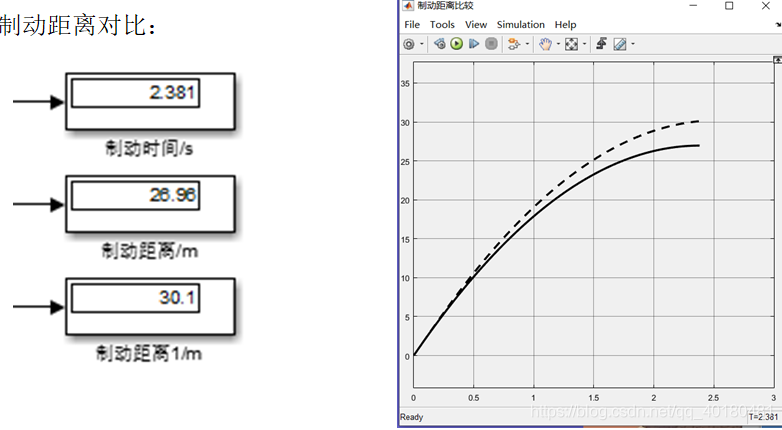
结果图:
我应该是没落下什么吧,嘻嘻,如果有的话,还望大家提醒。。。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









