




 本文是《基于深度学习的物体检测》的观后感,复习了Faster R - CNN检测流程,分两阶段,第一阶段用RPN分类得候选区域,第二阶段精细处理。还介绍了RefineDet工作,提及多尺度预测可提高精度,探讨了pytorch使用,最后指出未来检测可结合知识蒸馏提速及发力方向。
本文是《基于深度学习的物体检测》的观后感,复习了Faster R - CNN检测流程,分两阶段,第一阶段用RPN分类得候选区域,第二阶段精细处理。还介绍了RefineDet工作,提及多尺度预测可提高精度,探讨了pytorch使用,最后指出未来检测可结合知识蒸馏提速及发力方向。
《基于深度学习的物体检测_张士峰》观后感
首先是复习了Faster R-CNN的检测流程,主要分为两个阶段
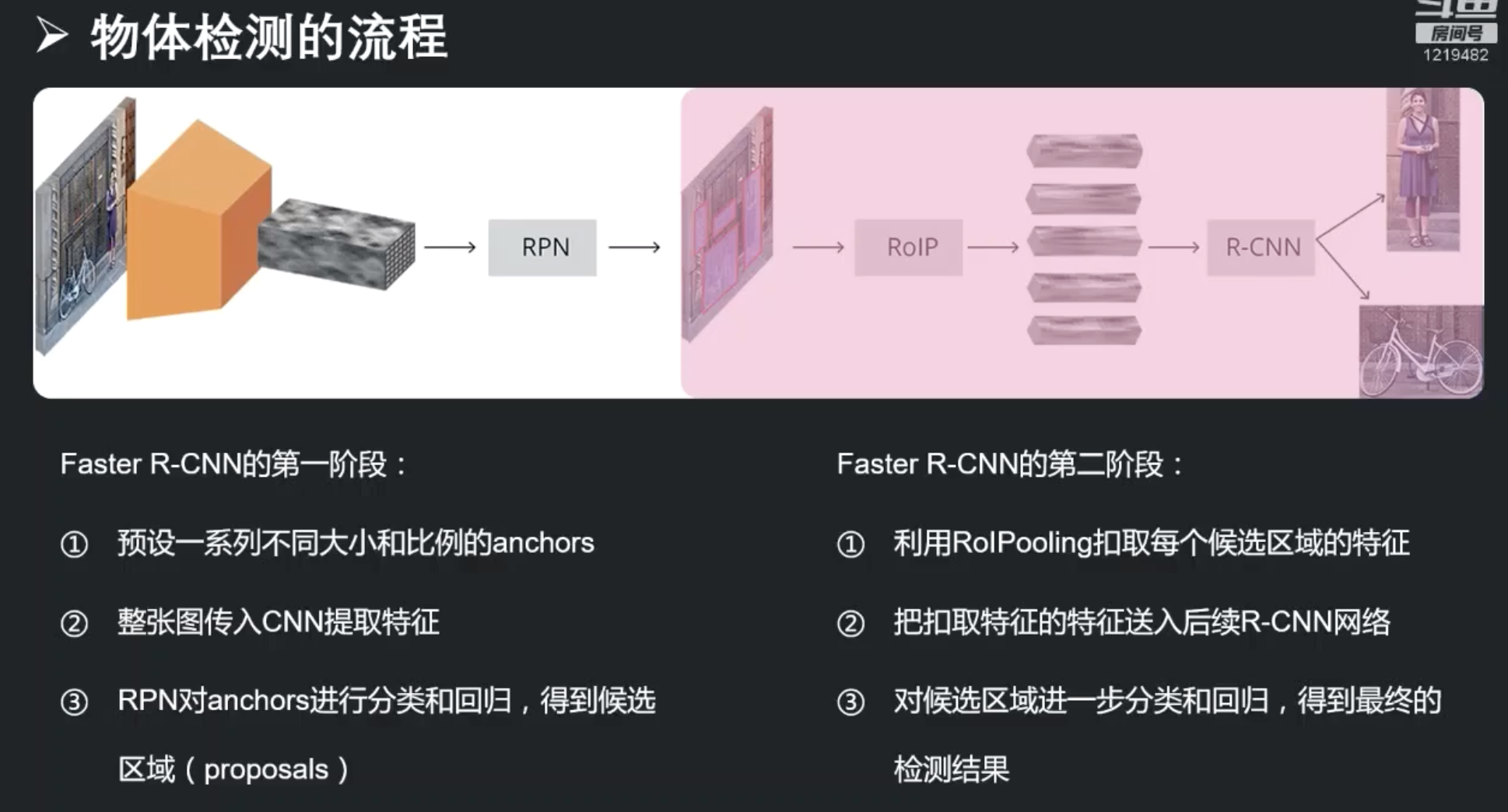
第一阶段:
根据预设的anchor(3种不同的scale和size),传入cnn提取特征,使用RPN(二分类,分辨前景和背景,过滤了大量的负样本(背景))对anchor进行分类,得到候选区域proposal。
第二阶段:
对第一阶段得到的proposal进行更精细的处理。
使用roipooling抠取每个候选区域的特征,并将其送到R-CNN(多分类),目的是对候选区域进行进一步的分类和回归,得到最终的结果。
其工作RefineDet(TPAMI)是在SSD的基础上加了三个模块来实现的,在pytorch上的实现较简单。
其他总结如下:
-
二阶段:
对一阶段的每个proposal做的操作,可以对特征区域进行精准的对齐,因为后面二阶段基于分类和回归的特征是完完全全属于那个候选区域的。
roi pooling
roi align -
RefineDet320是对于320*320的图像进行测试
RefineDet320+是多尺度测试 -
多尺度预测能提高几个点的精度,想知道多尺度测试的模板代码是什么?
-
pytorch可以使用函数 生成backbone
-
pytorch先定义网络再操作网络
-
未来:
检测+知识蒸馏提速
未来可以发力的方向:learning evething:
预处理:anchor的设置
后处理:NMS


















 2927
2927




 到【灌水乐园】发言
到【灌水乐园】发言







