






写在前面:
Robotics Toolbox10.2文件已经放在夸克网盘,可以自行下载。
我用夸克网盘分享了「Matlab_Robotic_Toolbox-10.2」,点击链接即可保存。打开「夸克APP」,无需下载在线播放视频,畅享原画5倍速,支持电视投屏。
链接:https://pan.quark.cn/s/f13c76c603df
1. 首先参考以下链接安装配置一下Robotics Toolbox10.2,以下安装步骤我是直接参考的下面链接。
2 机械臂基础(1---Robotics Toolbox安装与机械臂坐标变换)_matlab中机械臂设置基坐标系-优快云博客
Step1:解压zip文件,将/rvctools文件夹复制到自己的MATLAB安装目录的/toolbox下面
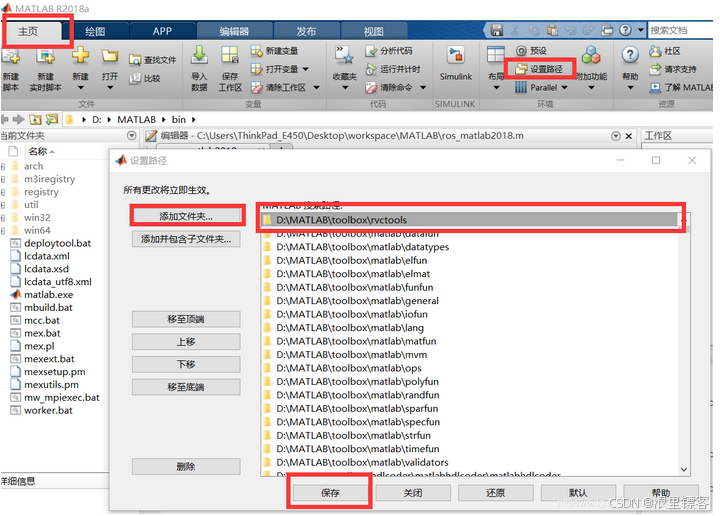
Step2:在MATLAB里,主页栏下点击【设置路径】,点击【添加文件夹】,将刚刚拷贝到MATLAB安装目录下的/toolbox/rvctools添加进去,然后保存即可。
Step3:在MATLAB的命令行窗口输入startup_rvc,查看是否成功加载,输入ver可以查看版本信息。这个startup_rvc在每次运行代码前都要输入,很重要。
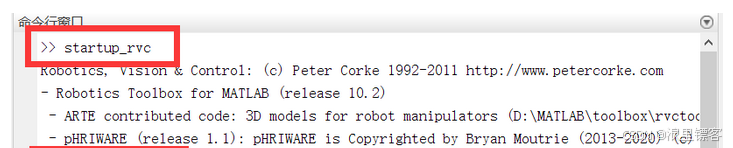
每次运行机器人工具箱之前,最好先输入startup_rvc!!!!!!!!!!!!!!
2. 以下是RM65-B机械臂的工作空间分析代码:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









