







 论文提出了一种基于动量守恒和恢复系数的冲击模型,用于判断交通事故的严重性,特别适用于ADAS系统的有效性研究。通过与PC-Crash软件的对比验证,模型显示出了较高的精度。未来的研究方向包括三维模型扩展、参数敏感性研究及碰撞点定义的优化。
论文提出了一种基于动量守恒和恢复系数的冲击模型,用于判断交通事故的严重性,特别适用于ADAS系统的有效性研究。通过与PC-Crash软件的对比验证,模型显示出了较高的精度。未来的研究方向包括三维模型扩展、参数敏感性研究及碰撞点定义的优化。
论文名字太长了,标题打不下了。。。
《Evaluation of a momentum based impact model and application in an effectivity study considering junction accidents 》
1 背景
这篇论文是以ADAS(Advanced Driver Assistance Systems)作为背景展开的,驾驶辅助系统,直观上看应该算是L3级别。
作为辅助驾驶系统,有各种各样的问题需要解决,比如说“什么样的事故可以避免,什么样的避免不了”。这种。而“仿真”可以提供大量不同的场景去帮助测试。而这篇文章主要讨论的问题就是,如何去判断一个事故的严重性。
本文明确提出其目标:提出一个基于动量守恒方程和恢复原理的冲击模型,并探讨其在ADAS有效性研究中的适用性。
2 方法
2.1 一些基本规则
本文使用的方法类似于我之前学习的车辆事故分析和重建方法。也是一套基于动量守恒的建模方式。个人理解这篇文章就属于该理论的一种应用。对于这套冲击模型,做出以下假设:
- 该模型只考虑两车之间交换的接触力
- 轮胎力忽略不计
- 碰撞持续时间被假设为无限小
- 不计算形变
- 模型只考虑二维
1)动量&角动量守恒
无外力系统动量和角动量应该是守恒的:
p ⃗ = p ⃗ 1 + p ⃗ 2 + ⋯ + p ⃗ n L ⃗ = L ⃗ 1 + L ⃗ 2 + ⋯ + L ⃗ n \vec p = \vec p_1 + \vec p_2 + \cdots + \vec p_n\\ \vec L = \vec L_1 + \vec L_2 + \cdots + \vec L_n p=p1+p2+⋯+pnL=L1+L2+⋯+Ln
2)恢复系数
碰撞分为两个阶段,压缩阶段和恢复阶段。压缩阶段产生形变,直到接触面相对速度为0。接下来就是恢复阶段。那这里的恢复系数
e
e
e被定义为两个阶段动量变化量的比值:
e
=
S
⃗
r
e
s
t
S
⃗
k
o
m
p
e = \frac{\vec S_{rest}}{\vec S_{komp}}
e=SkompSrest
这个恢复系数看起来和车辆事故分析和重建方法中的形式不同,前者是动量变化量的比值,后者是碰撞前后两车相对速度的比值。这里先记录下来,后续有机会深入探索一下恢复系数。
2.2 基于动量的冲击模型
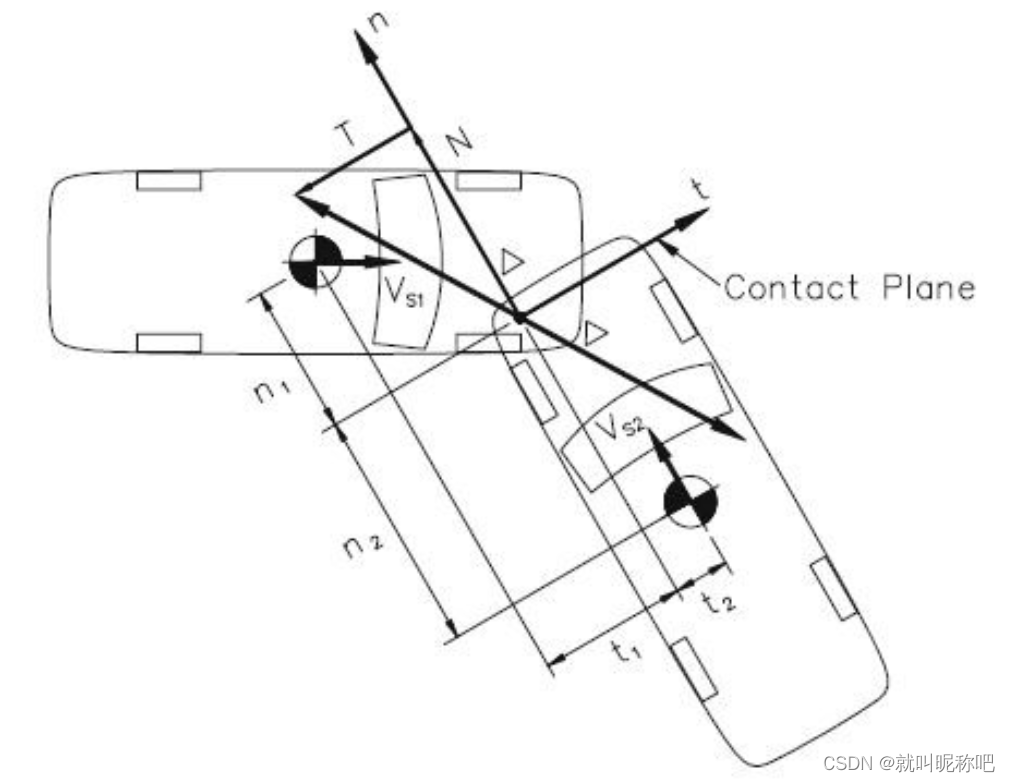
类似地,n-t坐标系与车辆事故分析和重建方法中看样子是一致的,如下图。t是接触面切线方向,n是接触面法向方向。两车重心 ( c e n t e r o f g r a v i t y , c o g ) (center\ of\ gravity,\ cog) (center of gravity, cog)速度在n和t方向速度分量可以通过点积求得,其中 ϕ \phi ϕ代表速度在原始坐标系下的角度:
v T c o g 1 = v c o g 1 ⋅ ( c o s ( ϕ 1 ) s i n ( ϕ 1 ) ) ⋅ t ⃗ v N c o g 1 = v c o g 1 ⋅ ( − s i n ( ϕ 1 ) c o s ( ϕ 1 ) ) ⋅ n ⃗ v_{Tcog1} = v_{cog1}\cdot \begin{pmatrix}cos(\phi_1)\\sin(\phi_1)\end{pmatrix} \cdot \vec t \\ v_{Ncog1} = v_{cog1}\cdot \begin{pmatrix}-sin(\phi_1)\\cos(\phi_1)\end{pmatrix} \cdot \vec n vTcog1=vcog1⋅(cos(ϕ1)sin(ϕ1))⋅tvNcog1=vcog1⋅(−sin(ϕ1)cos(ϕ1))⋅n
然后在接触点的那个位置的速度,算上角速度可以求得:
v T 1 = v T c o g 1 + w 1 n 1 v N 1 = v T c o g 1 − w 1 t 1 v_{T1} = v_{Tcog1} + w_1n_1\\ v_{N1} = v_{Tcog1} - w_1t_1 vT1=vTcog1+w1n1vN1=vTcog1−w1t1
然后设 I 1 , I 2 I_1, I_2 I1,I2是两个车的转动惯量,接下来文章列的守恒方程,和车辆事故分析和重建方法应该是一模一样的,字母用的不一样,不知道为什么不保持一致。这里不重复写了。
最后文章讨论了一下Full impact和Sliding collision。这里大概就是对应了车辆事故分析和重建方法中的impulse ratio这个概念。
2.3 定义接触点
因为这个方法应用的时候得选择n-t坐标系,那确定这个坐标原点就比较重要了。车辆事故分析和重建方法中这个点叫做Point C。本文叫POI,point of impact。这里是用的几何方法定义这个点。

我概括一下这个方法就是:
- 两车polygon重合点的质心作为POI
- 两车polygon的交点作直线CP(Contact Plane)代表t方向所在直线,有了t就有了n
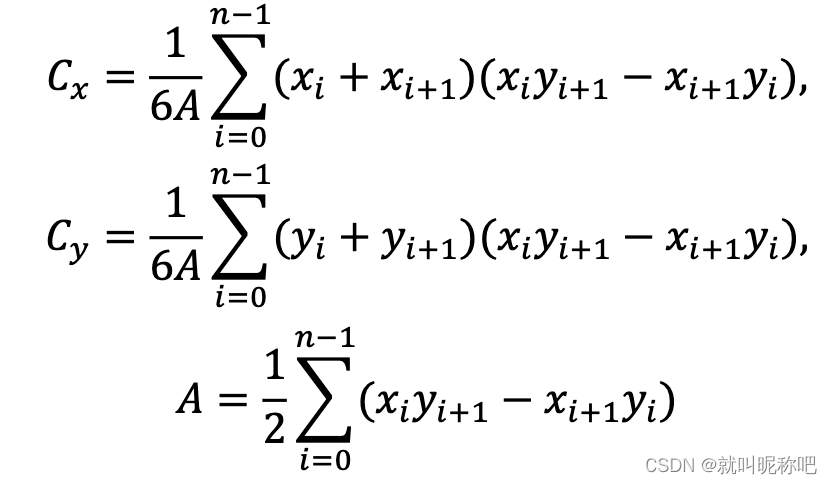
这里多边形的质心求法文章是参考的维基百科给的方法,大概就是把多边形分割为三角形,然后将所有三角形重心坐标根据面积加权这个方法。(不过我看这个式子的下标范围怎么怪怪的,一共
n
n
n个点,那式子里竟然会出现
x
n
x_n
xn)
另外,文章使用仿真方法去做这件事情,那这个重合的位置是怎么选的呢?文章里提到After initial contact, the simulation is continued without impact calculation for a certain amount of time (also called penetration depth)。也就是说,在刚刚接触时刻,再往后运行一小段时间叫做penetration depth,选择这个位置作为求解位置。
3 方法验证
本文用了一个叫做PC-Crash的软件去验证这个建模方法算得到底好不好。这个PC-Crash作为一个事故重建软件,在业界内是广泛被接受的。然后这个事故数据是从CEDATU (Central Database for In-Depth Accident Study)这里拿的,这里的事故应该都被PC-Crash重建过了的。
本文一共选择36个事故,去评估这个建模方法,算出来的结果发现,本文的方法和PC-Crash算出来的,在小数点后几个点位是相同的。(这么准的吗?)
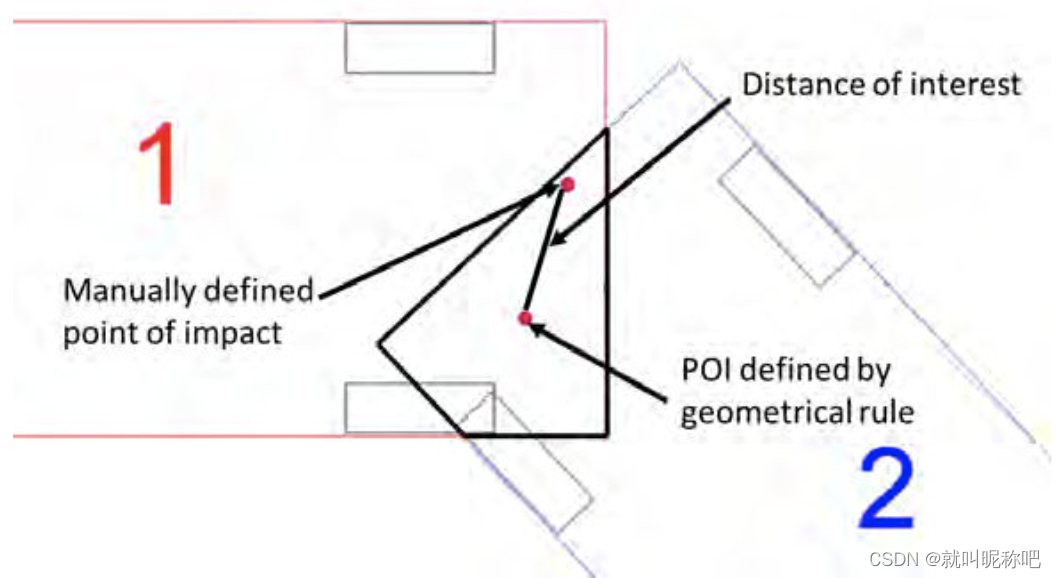
本文还探究了这个POI和CP对计算结果的灵敏度。大概就是这样子,用人选的点和几何规则选择的点去对比。然后看这个Distance of interest和 Δ v \Delta v Δv的变化关系,如下图所示。
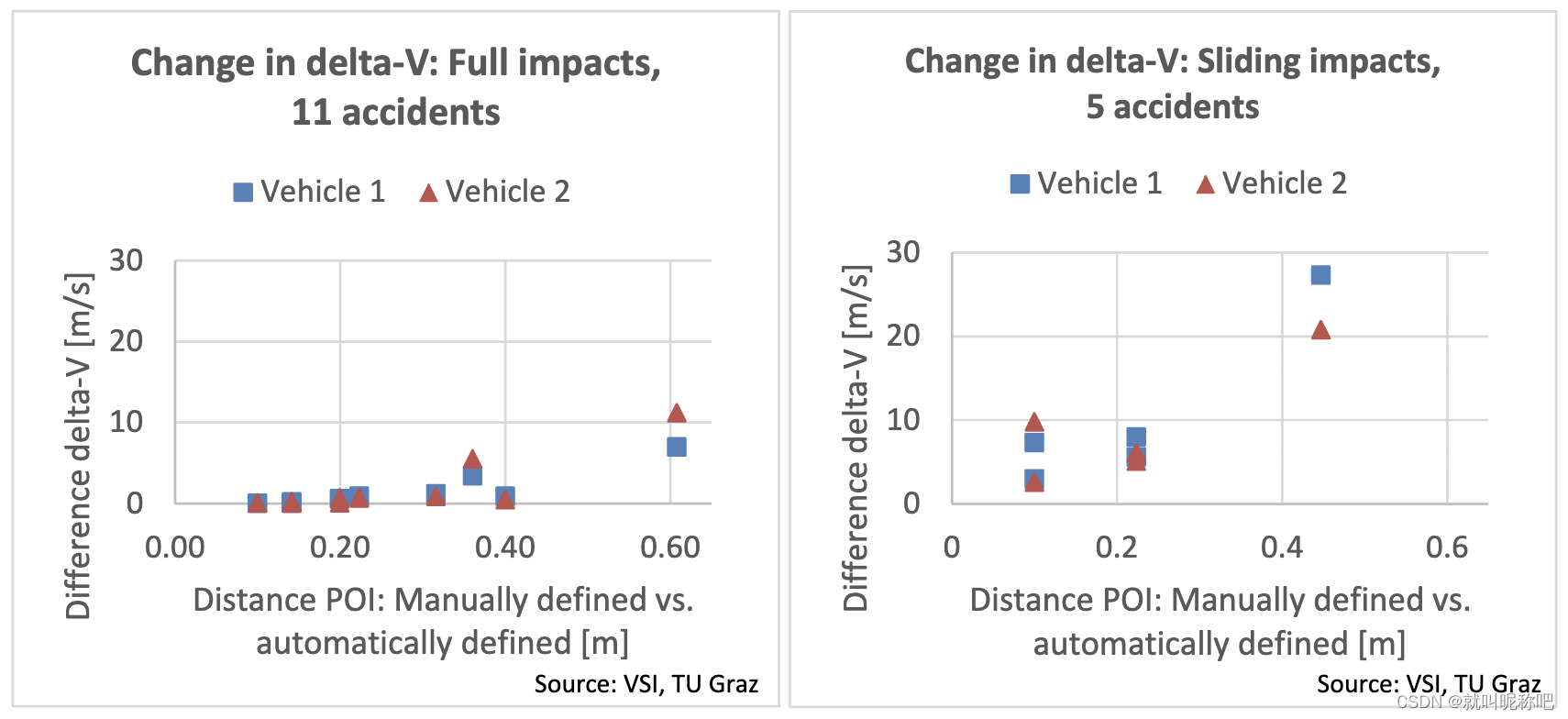
看下对比结果吧。这里把Full impact和Sliding impact分开来看了。看得出来,这个Sliding impact的计算结果对POI更敏感,因为distance变大了之后,这个 Δ v \Delta v Δv变了能有25m/s。对于Full impact,这个distance的变化浮动在21里面到26里面之间看样子都是可接受的。
4 未来展望
本文认为未来的改进方向主要包含3点:
- 拓展到3维模型
- 模型对输入参数的敏感性的进一步研究
- POI和CP更好的设定方式,尤其是对Sliding impact
5 总结(个人)
这篇文章刚好算是对车辆事故分析和重建方法的一种应用,由于这篇文章主要是用仿真的方法进行的测试,所以确实对于POI和CP的选择需要更进一步地去研究,我直观认为,POI和CP的位置应该是碰撞前两车速度、夹角、两车材料的函数,不过这个实验起来应该很困难~


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









