







目录
该篇为理解NeRF的预备知识,主要包括了相机成像原理、基本渲染知识以及逆变换相关知识。
论文地址:https://dl.acm.org/doi/pdf/10.1145/3503250
代码地址:https://github.com/yenchenlin/nerf-pytorch
1、相机成像原理
我们需要明白到为什么要了解相机成像原理,了解后能够对我们理解NeRF有什么帮助?下面直接说结论:了解相机成像原理后,能够直观明白NeRF中提及到的射线,以及相关代码。
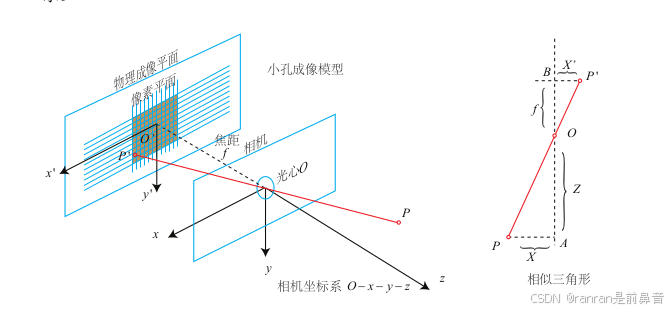
真实世界中的3D物体通过一系列坐标变换形成2D图片,其中涉及到四个坐标变换:
世界坐标系:
相机坐标系:
物理成像坐标系(归一化的相机坐标系):
像素坐标系:
具体成像过程坐标转换为
相机坐标系到物理成像平面坐标变换:
相机坐标系中一点变换为成像平面
通过下面坐标变换:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











