







 本文深入解析A*寻路算法原理,通过实例演示如何在包含障碍物的环境中寻找从起点到终点的最短路径。文章详细介绍了算法的OpenList和CloseList概念,以及G值、H值和F值的计算方法,最后给出了Unity环境下实现A*算法的代码示例。
本文深入解析A*寻路算法原理,通过实例演示如何在包含障碍物的环境中寻找从起点到终点的最短路径。文章详细介绍了算法的OpenList和CloseList概念,以及G值、H值和F值的计算方法,最后给出了Unity环境下实现A*算法的代码示例。
摘自:https://blog.youkuaiyun.com/weixin_44489823/article/details/89382502
1:之前没有真正的理解A*算法的原理,于是就找各种博客对A*算法进行原理上的理解,毕竟理解了对以后做寻路啊等会有很大帮助,为了以后忘记了还可以重新温习一遍;
2:绿色的块块代表起始点,红色的快快代表是终点,蓝色的快快代表墙

3:如果我们需要寻路,我们当然是想找一条最短路径到达终点,难道还要绕个大湾在抵达终点吗,哈哈
4:ok废话不多说,开始探索
先明白这几个字段的概念:
1:OpenList:可以理解为开放列表,之后需要对开放列表进行遍历,找到最小的那个F值
2:CloseList:可以理解为不需要关注的列表
3:节点:因为没一个节点都有8个小方块指向自己,可以默认为自己成为了父节点
4:G:从起点 A 移动到指定方格的移动代价,沿着到达该方格而生成的路径
5:H:从指定的方格移动到终点 B 的估算成本。这个通常被称为试探法,有点让人混淆。为什么这么叫呢,因为这是个猜测。直到我们找到了路径我们才会知道真正的距离,因为途中有各种各样的东西 ( 比如墙壁,水等 ),最短抵达终点的距离,当然只能水平和垂直方法 。
6:F:F = G+H,利用这个值来做寻路排查的标记
5:详解图:
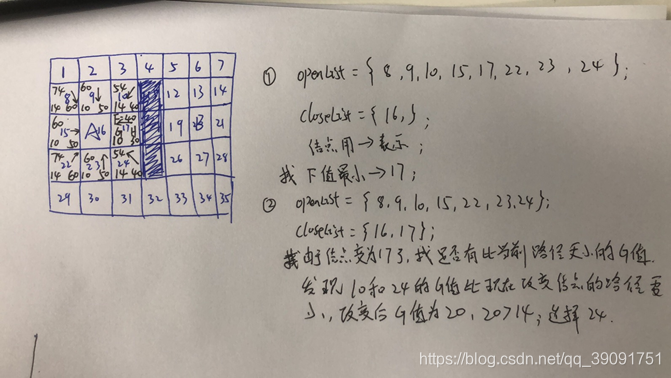
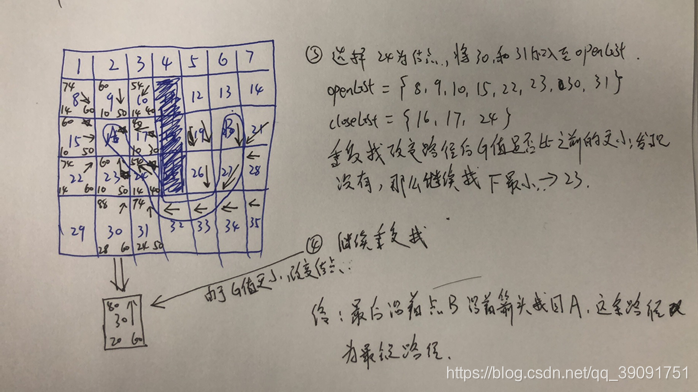
寻找节点,在根据节点,去寻找有没有在更换路径之后更小的G值,有的话,那么就更新当前的G值和F值并且更新箭头指向,在从Openlist寻找最小的F值,继续遍历,最终找到最优的路径
寻路关键代码:
/// <summary>
/// 使用A*算法寻路
/// </summary>
/// <param name="start"></param>
/// <param name="end"></param>
void FindPath(Vector2 start,Vector2 end)
{
//和A*算法无关,只是为了显示使用
int showFindNum=1;
//开启列表
List<Cell> openLs = new List<Cell>();
//关闭列表
List<Cell> closeLs = new List<Cell>();
//起点
Cell startCell = grid.GetCell(start);
//终点
Cell endCell = grid.GetCell(end);
Debug.LogFormat("寻路开始,start({0}),end({1})!",start,end);
//将起点作为待处理的点放入开启列表,
openLs.Add(startCell);
//如果开启列表没有待处理点表示寻路失败,此路不通
while(openLs.Count>0)
{
//遍历开启列表,找到消费最小的点作为检查点
Cell cur = openLs[0];
for (int i = 0; i < openLs.Count; i++)
{
if(openLs[i].fCost<cur.fCost&&openLs[i].hCost<cur.hCost)
{
cur = openLs[i];
}
}
Debug.Log("当前检查点:" + cur.ToString()+" 编号:"+showFindNum+" open列表节点数量:"+openLs.Count);
//显示在界面,和A*算法无关
cur.obj.transform.Find("Num").GetComponent<Text>().text=showFindNum.ToString();
showFindNum++;
//从开启列表中删除检查点,把它加入到一个“关闭列表”,列表中保存所有不需要再次检查的方格。
openLs.Remove(cur);
closeLs.Add(cur);
//检查是否找到终点
if(cur==endCell)
{
Debug.Log("寻路结束!");
grid.CreatePath(cur);
return;
}
//根据检查点来找到周围可行走的点
//1.如果是墙或者在关闭列表中则跳过
//2.如果点不在开启列表中则添加
//3.如果点在开启列表中且当前的总花费比之前的总花费小,则更新该点信息
List<Cell> aroundCells = GetAllAroundCells(cur);
foreach (var cell in aroundCells)
{
if (cell.isWall || closeLs.Contains(cell))
continue;
int cost= cur.gCost+ GetDistanceCost(cell, cur);
if(cost<cell.gCost||!openLs.Contains(cell))
{
cell.gCost = cost;
cell.hCost = GetDistanceCost(cell,endCell);
cell.parent = cur;
Debug.Log("cell:" + cell.ToString() + " parent:" + cur.ToString() + " " + cell.PrintCost());
if(!openLs.Contains(cell))
{
openLs.Add(cell);
}
//显示在界面,和A*算法无关
cell.obj.transform.Find("Cost").GetComponent<Text>().text = cell.fCost.ToString();
}
}
}
Debug.Log("寻路失败!");
}



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











