







 本文深入探讨了图论中的核心算法——图的遍历,包括深度优先遍历(DFS)和广度优先遍历(BFS)。通过邻接矩阵和邻接表两种方式实现了这两种遍历方法,为读者提供了全面的算法实现细节。
本文深入探讨了图论中的核心算法——图的遍历,包括深度优先遍历(DFS)和广度优先遍历(BFS)。通过邻接矩阵和邻接表两种方式实现了这两种遍历方法,为读者提供了全面的算法实现细节。
图建构好后,针对具体的问题,我们常常需要通盘的读取图中的信息,包括顶点(vertexvertexvertex)和边(edgeedgeedge),以及它们之间的关系。这种读取图中所有信息的方法就是图的遍历(traversaltraversaltraversal),也称为搜索(searchsearchsearch),就是从图中某个顶点出发,沿着一些边访问图中所有的顶点,且使每个顶点仅被访问一次。遍历是很多图论算法的基础。
常用的图的遍历方法有DFSDFSDFS(depthdepthdepth firstfirstfirst searchsearchsearch)与BFSBFSBFS(breadthbreadthbreadth firstfirstfirst searchsearchsearch)
DFS(深度优先遍历)
深度优先遍历(DepthDepthDepth FirstFirstFirst SearchSearchSearch),也被称为深度优先搜索,简称DFSDFSDFS
简单来说,就好比在房间中寻找钥匙,这个时候有很多种寻找方案,而我们采用DFSDFSDFS的思想,就无论从哪个房间开始寻找都可以,比如主卧室,然后从房间中的每一个角开始,将房间内的墙角、床头柜、床上、床下等挨个寻找,做到不放过任何一个角落,等每个角落都寻找完后,再寻找下一间,直到找到为止
邻接矩阵实现
typedef char VextexType; //顶点类型(自定义)
typedef int EdgeType; //边上权值类型(自定义)
#define MAXVEX 100 //最大顶点数
#define INFINITY 65535 //代替 无穷
typedef struct {
VextexType vexs[MAXVEX]; //顶点表
EdgeType arc[MAXVEX][MAXVEX]; //邻接矩阵
int numVextexes, numEdges; //图中当前顶点数和边数
}MGraph;
bool visited[MAXVEX]; //访问记录
//DFS递归算法
void DFS(MGraph G, int i) {
int j;
visited[i] = true; //首先标记为已访问
//接题意要求的操作
cout << G.vexs[i];
for (j = 0; j < G.numVextexes; ++j) {
//如果还有邻接点未被访问,则继续访问
if (G.arc[i][j] == 1 && !visited[j])
DFS(G,j);
}
}
//DFS操作
void DFSTraverse(MGraph G) {
int i;
//初始化访问记录表
for (i = 0; i < G.numVextexes; ++i) {
visited[i] = false;
}
//遍历每一个顶点
for (i = 0; i < numVextexes; ++i) {
if (!visited[i])
DFS(G, i);
}
}
邻接表实现
typedef char VertexType;
typedef int EdgeType;
#define MAXVEX 100
typedef struct EdgeNode {
int adjvex;
EdgeType weight;
struct EdgeNode *next;
}EdgeNode;
typedef struct VertexNode {
VertexType data;
EdgeNode *firstedge;
}VertexNode, AdjList[MAXVEX];
typedef struct {
AdjList adjList;
int numVextexes, numEdges;
}GraphAdjList;
bool visited[MAXVEX]; //访问记录
void DFS(GraphAdjList G, int i) {
EdgeNode *p;
cout << G.adjList[i].data; //操作
p = G.adjList[i].firstedge;
//如果这条路还没走完则继续走
while (p) {
if (!visited[p->adjvex])
DFS(G, p->adjvex);
p = p->next;
}
}
//DFS操作
void DFSTraverse(GraphAdjList G) {
int i;
//初始化访问记录
for (i = 0; i < numVextexes; ++i) {
visited[i] = false;
}
//遍历每一个顶点
for (i = 0; i < numVextexes; ++i) {
if (!visited[i])
DFS(G, i);
}
}
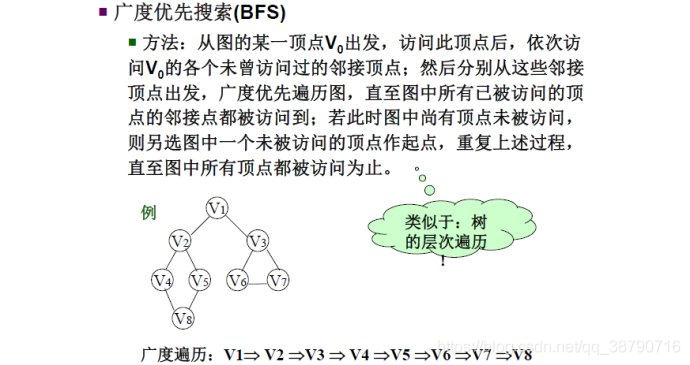
BFS(广度优先遍历)
广度优先遍历(BreadthBreadthBreadth FirstFirstFirst SerachSerachSerach),又称广度优先搜索,简称BFSBFSBFS
邻接矩阵实现
void BFSTraverse(MGraph G) {
int i,j;
queue<int> q;
for (i = 0; i < G.numVertexes; ++i) {
visited[i] = false;
}
for (i = 0; i < G.numVextexes; ++i) {
if (!visited[i])
visited[i] = true;
cout << G.vexs[i];
q.push(G.vexs[i]);
while (!q.empty()) {
VextexType temp = q.pop();
for (j = 0; j < G.numVextexes; ++j) {
if (G.arc[i][j] == 1 && !visited[j]) {
visited[j] = true;
cout << G.vexs[j];
q.push(G.vexs[j]);
}
}
}
}
}
邻接表实现
void BFSTraverse(GraphAdjList G) {
int i;
EdgeNode *p;
queue<int> q;
//初始化访问记录
for (i = 0; i < G.numVextexes; ++i) {
visited[i] = false;
}
//遍历每个顶点
for (i = 0; i < G.numVextexes; ++i) {
if (!visited[i]) {
visited[i] = true;
}
cout << G.adjList[i].data;
q.push(i);
while (!q.empty()) {
q.pop();
p = G.adjList[i].firstedge;
while (p) {
if (!visited[p->adjvex]) {
visited[p->adjvex] = true;
cout << G.adjList[p->adjvex].data;
q.push(p->adjvex);
p = p->next;
}
}
}
}
}

















 1820
1820

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









